델타 로봇
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
델타 로봇은 1980년대 초 스위스 로잔 연방 공과대학교의 레이몽 클라벨 교수가 발명한 병렬 로봇의 한 종류이다. 가볍고 작은 물체를 고속으로 조작하는 데 적합하며, 포장, 식품, 제약, 전자 산업 등 다양한 분야에서 활용된다. 델타 로봇은 여러 개의 운동 사슬과 평행사변형 구조를 사용하여 엔드 이펙터의 움직임을 제어하며, 3D 프린터, 햅틱 컨트롤러, 수술용 로봇 등에도 적용된다.
더 읽어볼만한 페이지
| 델타 로봇 | |
|---|---|
| 개요 | |
| 유형 | 병렬 로봇 |
| 작동 방식 | 병렬 메커니즘 |
| 축 수 | 3 ~ 6 |
| 용도 | 고속, 고정밀도 조립 포장 식품 가공 수술 |
| 특징 | |
| 장점 | 고속 작동 높은 강성 높은 정밀도 |
| 단점 | 제한된 작업 공간 복잡한 제어 |
| 구조 | |
| 주요 구성 요소 | 베이스 링크 조인트 엔드 이펙터 |
| 작동 원리 | 여러 개의 링크를 사용하여 엔드 이펙터의 위치와 자세를 제어 |
| 응용 분야 | |
| 산업 자동화 | 조립 포장 검사 핸들링 |
| 의료 분야 | 수술 로봇 재활 로봇 |
| 식품 산업 | 식품 가공 및 포장 |
| 관련 용어 | |
| 병렬 메커니즘 | 여러 개의 링크가 병렬로 연결된 구조 |
| 엔드 이펙터 | 로봇 팔의 끝에 부착되어 작업을 수행하는 장치 |
| 자유도 | 로봇이 움직일 수 있는 독립적인 방향의 수 |
| 기타 정보 | |
| 변형 | 3축 델타 로봇 4축 델타 로봇 6축 델타 로봇 |
| 제조사 | ABB Adept Technology Fanuc Staubli |
2. 역사
병렬 링크 로봇에서 '병렬'은 평행이 아닌 병렬을 의미하며, 평행 링크 기구를 뜻하는 것은 아니다. 기존의 다관절 로봇은 직렬 링크 로봇이라고 불린다.
병렬 링크 로봇은 일부 기업에서 산업용 로봇으로 출시되었지만, 일반적인 산업용 로봇(다관절 로봇)은 아니다. 다관절 로봇의 단점을 보완하는 로봇으로 주목받았으나, 인간의 팔 구조와 달라 인간을 대체하는 작업에는 널리 쓰이지 못했다.
화낙(Fanuc)의 병렬 링크 로봇[21]은 볼 나사를 이용한 직동 기구 6개를 조합해 6자유도를 구현한다. 모든 모터의 힘을 합칠 수 있어 이론적으로 같은 크기, 같은 출력의 다관절 로봇보다 6배의 힘을 낼 수 있다. 이 로봇은 높은 정밀도와 출력을 바탕으로 간단한 기계 가공이나 프레스 가공에도 사용된다.
2. 1. 개발 배경

델타 로봇(병렬 암 로봇)은 1980년대 초 스위스 로잔 연방 공과대학교(EPFL)의 레이몽 클라벨 교수가 이끄는 연구팀에 의해 발명되었다.[5] 한 팀원이 초콜릿 제조업체를 방문한 후 포장지에 프랄린을 넣는 로봇을 개발하고 싶어 했다.[6] 이 새로운 유형의 로봇은 당시 산업적 요구 사항이었던 가볍고 작은 물체를 매우 빠른 속도로 조작하는 것을 목표로 했다.
1987년, 스위스 회사 Demaurex는 델타 로봇에 대한 라이선스를 구매하여 포장 산업용 델타 로봇 생산을 시작했다. 1991년, 레이몽 클라벨은 '4자유도를 가진 고속 병렬 로봇 설계'라는 제목의 박사 학위 논문을 발표[7]했고, 1999년에는 델타 로봇의 연구 및 개발로 황금 로봇 상을 수상했다. 같은 해 ABB 플렉시블 오토메이션이 델타 로봇인 FlexPicker를 판매하기 시작했고, 1999년 말에는 Sigpack Systems에서도 델타 로봇을 판매했다.
2017년, 하버드 대학교의 마이크로로보틱스 연구소 연구원들은 압전 액추에이터를 사용하여 15mm x 15mm x 20mm 크기에 0.43g으로 소형화했으며, 7 입방 밀리미터 작업 공간에서 1.3g의 페이로드를 5 마이크로미터 정밀도로 이동시키고, 215m/s2 가속도로 0.45m/s 속도에 도달하며 75 Hz로 패턴을 반복할 수 있도록 했다.[8]
2. 2. 상용화 및 발전
델타 로봇은 1980년대 초 스위스 로잔 연방 공과대학교(EPFL)의 레이몽 클라벨 교수 연구팀이 발명하였다.[5] 연구팀의 한 팀원이 초콜릿 제조업체를 방문한 후 포장지에 프랄린을 넣는 로봇을 개발하고자 했다.[6] 이 로봇은 가볍고 작은 물체를 매우 빠른 속도로 조작해야 하는 당시 산업적 요구에 맞춰 개발되었다.
1987년, 스위스 회사 Demaurex는 델타 로봇 라이선스를 구매하여 포장 산업용 델타 로봇 생산을 시작했다. 1991년, 레이몽 클라벨은 '4자유도를 가진 고속 병렬 로봇 설계'라는 박사 학위 논문을 발표했고,[7] 1999년에는 델타 로봇 연구 및 개발로 황금 로봇 상을 수상했다. 같은 해 ABB 플렉시블 오토메이션이 델타 로봇인 FlexPicker를, Sigpack Systems에서도 델타 로봇을 판매하기 시작했다.
2017년, 하버드 대학교 마이크로로보틱스 연구소 연구원들은 압전 액추에이터를 사용한 소형 델타 로봇을 개발했다. 이 로봇은 15 mm x 15 mm x 20 mm 크기에 0.43g으로, 7 입방 밀리미터 작업 공간에서 1.3g의 페이로드를 5 마이크로미터 정밀도로 이동시킬 수 있으며, 215 m/s² 가속도로 0.45 m/s 속도에 도달하고 75 Hz로 패턴을 반복할 수 있다.[8]
병렬 링크 로봇은 여러 기업에서 출시되었지만, 일반적인 산업용 로봇(다관절 로봇)은 아니다. 기존 다관절 로봇의 단점을 극복하는 로봇으로 주목받았지만, 인간 팔 구조와 너무 달라 인간 대체 작업을 기대하는 산업용 로봇으로는 널리 보급되지는 않았다.
화낙(Fanuc)에서 출시된 병렬 링크 로봇[21]은 볼 나사에 의한 직동 기구를 6개 조합하여 6자유도를 얻는다. 모든 모터의 힘을 합칠 수 있어 이론적으로 동일 크기, 동일 출력의 다관절 로봇보다 6배의 힘을 얻을 수 있다. 이 로봇은 고정밀도, 고출력을 활용하여 간단한 기계 가공이나 프레스 가공도 가능하다.
2. 3. 소형화 및 최신 동향
2017년 하버드 대학교 마이크로로보틱스 연구소 연구원들은 압전 액추에이터를 사용하여 델타 로봇을 소형화했다. 이 로봇은 크기가 15 mm x 15 mm x 20 mm, 무게는 0.43g에 불과하다. 7 입방 밀리미터의 작업 공간에서 1.3g의 페이로드를 5 마이크로미터 정밀도로 이동시킬 수 있으며, 215 m/s² 가속도로 0.45 m/s 속도에 도달하고 75 Hz로 패턴을 반복할 수 있다.[8]
3. 디자인
델타 로봇은 병렬 로봇의 한 종류로, 베이스와 엔드 이펙터를 연결하는 여러 개의 운동 사슬로 구성된다. 이 로봇은 사각 링크의 공간적 일반화로도 볼 수 있다.[9]
델타 로봇의 핵심은 평행사변형을 사용하여 엔드 플랫폼의 움직임을 X, Y, Z 방향으로만 움직이도록 제한하는 것이다. 즉, 회전 없이 순수한 병진 운동만 가능하다.
로봇의 베이스는 작업 공간 위에 장착되며, 모든 액추에이터는 베이스에 위치한다. 베이스에서 세 개의 중간 관절 팔이 뻗어 나오며, 이 팔의 끝은 작은 삼각 플랫폼에 연결된다. 입력 링크를 작동시키면 삼각 플랫폼이 X, Y, Z 방향으로 움직인다. 선형 액추에이터나 회전 액추에이터를 사용하여 작동시킬 수 있으며, 감속기 유무에 따라 직접 구동 메커니즘을 사용할 수도 있다.
액추에이터가 모두 베이스에 있기 때문에 팔은 가벼운 복합 재료로 만들 수 있다. 따라서 델타 로봇의 움직이는 부분은 관성이 작아 매우 빠른 속도와 높은 가속도를 낼 수 있다. 모든 팔이 엔드 이펙터에 함께 연결되어 로봇의 강성은 높아지지만, 작업 범위는 줄어든다.
레이몽 클라벨이 개발한 버전은 네 개의 자유도를 갖는다.[7] 세 개의 병진 운동과 한 개의 회전 운동이다. 이 경우 네 번째 다리가 베이스에서 삼각 플랫폼 중앙까지 뻗어 나와 엔드 이펙터에 수직 축을 중심으로 하는 네 번째 회전 자유도를 제공한다.
최근에는 다양한 델타 로봇 설계 방식이 개발되고 있다.
| 종류 | 특징 |
|---|---|
| 6자유도 델타 | 화낙에서 개발. 엔드 이펙터에 3개의 회전 자유도를 가진 직렬 운동학을 배치했다. |
| 4자유도 델타 | 아데프트 테크놀로지에서 개발. 엔드 이펙터 중앙에 네 번째 다리가 있는 대신 엔드 플랫폼에 직접 연결된 4개의 평행사변형을 가지고 있다. |
| 포켓델타 로봇 | 스위스 회사 [https://www.asyril.com/en/products/modules.html Asyril SA]에서 개발. 유연한 부품 공급 시스템 및 기타 고속, 고정밀 응용 분야에 적합한 3축 델타 로봇이다. |
| 델타 직접 구동 | 모터가 팔에 직접 연결된 3자유도 델타 로봇. 가속도는 30[10]에서 최대 100g까지 매우 높을 수 있다. |
| 델타 큐브 | EPFL 대학교 실험실 LSRO에서 개발. 플렉셔 힌지 조인트가 있는 모놀리식 디자인으로 제작되어 초고정밀 응용 분야에 적합하다. |
| 선형 델타 | 모터가 팔을 회전시키는 대신 선형 액추에이터를 구동한다. 회전 델타 배열보다 훨씬 큰 작업 범위를 가질 수 있다.[11][12] |
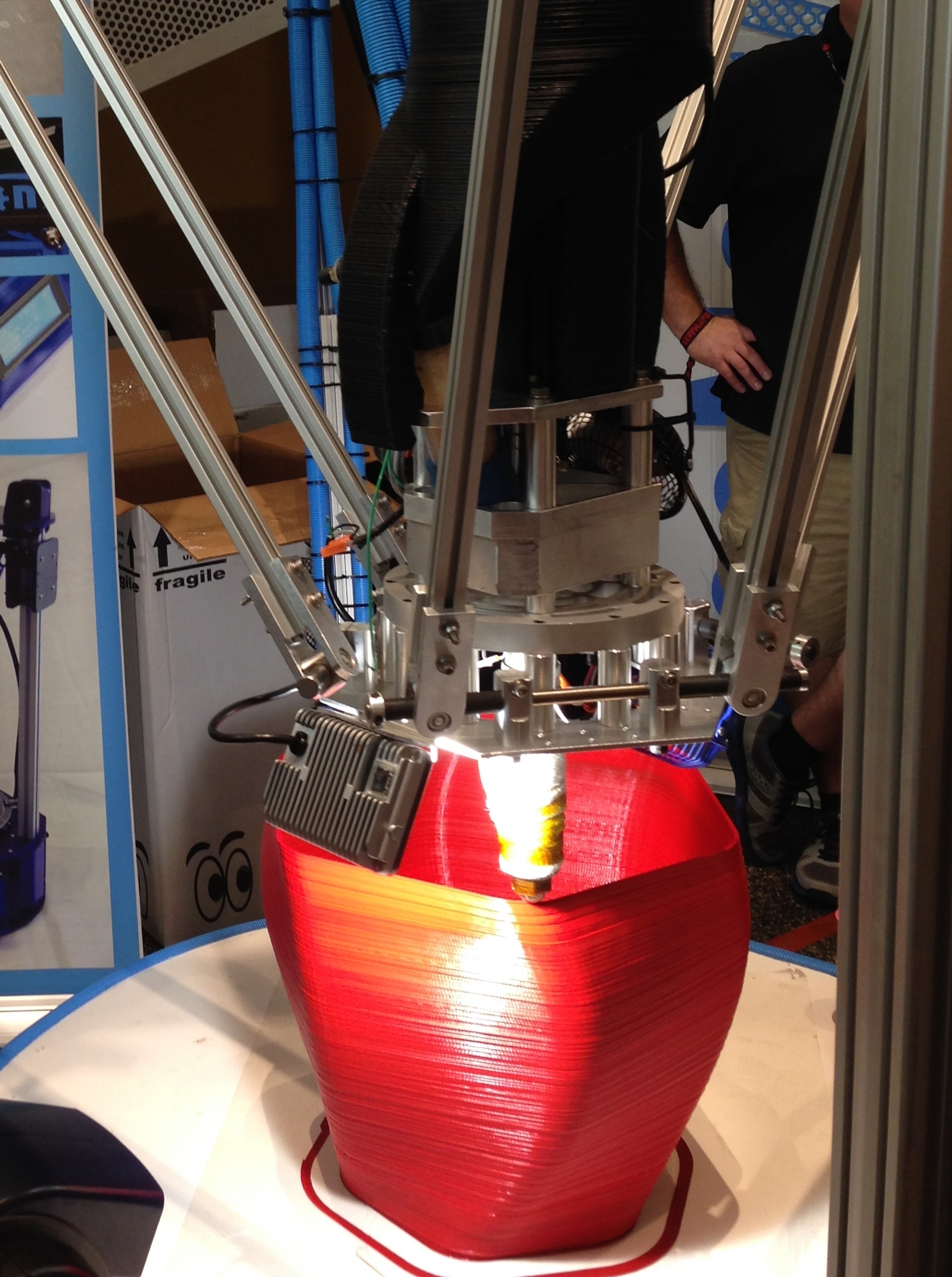
대부분의 델타 로봇은 회전 액추에이터를 사용하지만, 최근에는 수직 선형 액추에이터가 3D 프린터의 새로운 설계를 위해 사용되기도 한다(선형 델타 디자인 사용).[13][14] 이는 기존의 리드 스크류 기반 3D 프린터보다 하드웨어 투자를 고려할 때 더 큰 빌드 볼륨에 빠르게 접근할 수 있다는 장점이 있다.
3. 1. 기본 원리
델타 로봇은 병렬 로봇의 한 종류로, 베이스와 엔드 이펙터(로봇 팔 끝에서 물체를 잡는 부분)를 연결하는 여러 개의 운동 사슬로 구성된다. 사각 링크의 공간적 일반화로도 볼 수 있다.[9]델타 로봇의 핵심은 평행사변형을 사용하여 엔드 플랫폼이 X, Y, Z 방향으로만 움직이고 회전하지 않도록 하는 것이다.
로봇의 베이스는 작업 공간 위에 설치되며, 모든 액추에이터는 베이스에 있다. 베이스에서 세 개의 팔이 뻗어 나와 작은 삼각 플랫폼에 연결된다. 선형 액추에이터나 회전 액추에이터를 사용하여 이 삼각 플랫폼을 X, Y, Z 방향으로 움직인다. 감속기 유무에 따라 직접 구동 메커니즘을 사용할 수 있다.
액추에이터가 베이스에 있기 때문에 팔은 가벼운 복합 재료로 만들 수 있다. 따라서 델타 로봇의 움직이는 부분은 관성이 작아 매우 빠른 속도와 높은 가속도를 낼 수 있다. 모든 팔이 엔드 이펙터에 함께 연결되어 로봇의 강성은 높아지지만 작업 범위는 줄어든다.
레이몽 클라벨이 개발한 델타 로봇은 네 개의 자유도를 갖는다.[7] 세 개의 병진 운동(X, Y, Z 방향 이동)과 한 개의 회전 운동이다. 네 번째 다리가 베이스에서 삼각 플랫폼 중앙까지 연결되어 엔드 이펙터가 수직 축을 중심으로 회전할 수 있게 한다.
3. 2. 구조 및 작동 방식
델타 로봇은 병렬 로봇의 일종으로, 베이스와 엔드 이펙터(로봇 팔 끝에서 물체를 잡거나 조작하는 부분)를 연결하는 여러 개의 운동 사슬로 구성된다. 이 로봇은 사각 링크를 공간적으로 일반화한 형태로 볼 수도 있다.[9]델타 로봇의 핵심은 평행사변형 구조를 사용하여 엔드 플랫폼이 회전 없이 X, Y, Z 방향으로만 움직이도록(병진 운동) 하는 것이다.
로봇의 베이스는 작업 공간 위에 설치되며, 모든 액추에이터는 이 베이스에 위치한다. 베이스에서 세 개의 중간 관절 팔이 뻗어 나와 작은 삼각 플랫폼에 연결된다. 입력 링크를 작동시키면 삼각 플랫폼이 X, Y, Z 방향으로 움직인다. 선형 액추에이터나 회전 액추에이터를 사용하여 작동시킬 수 있으며, 감속기 유무에 따라 직접 구동 메커니즘을 사용할 수도 있다.
액추에이터가 모두 베이스에 있기 때문에 팔은 가벼운 복합 재료로 만들 수 있다. 따라서 델타 로봇의 움직이는 부분은 관성이 작아 매우 빠른 속도와 높은 가속도를 낼 수 있다. 모든 팔이 엔드 이펙터에 함께 연결되어 로봇의 강성은 높아지지만, 작업 범위는 줄어든다.
레이몽 클라벨이 개발한 델타 로봇은 네 개의 자유도를 갖는다.[7] 세 개의 병진 운동과 한 개의 회전 운동이다. 이 로봇은 네 번째 다리가 베이스에서 삼각 플랫폼 중앙까지 뻗어 있어 엔드 이펙터가 수직축을 중심으로 회전할 수 있게 한다.
최근에는 다양한 형태의 델타 로봇이 개발되고 있다.
- 6자유도 델타: 화낙사에서 개발. 엔드 이펙터에 3개의 회전 자유도를 가진 직렬 운동학을 배치했다.
- 4자유도 델타: 아데프트 테크놀로지사에서 개발. 네 번째 다리 대신 엔드 플랫폼에 직접 연결된 4개의 평행사변형을 가지고 있다.
- 포켓델타 로봇: 스위스 회사 [https://www.asyril.com/en/products/modules.html Asyril SA]에서 개발. 유연한 부품 공급 시스템 및 기타 고속, 고정밀 응용 분야에 적합한 3축 델타 로봇이다.
- 델타 직접 구동: 모터가 팔에 직접 연결된 3자유도 델타 로봇. 가속도가 30[10]에서 최대 100g까지 매우 높다.
- 델타 큐브: EPFL 대학교 실험실 LSRO에서 개발. 플렉셔 힌지 조인트가 있는 모놀리식 디자인으로 제작되어 초고정밀 응용 분야에 적합하다.
- 선형 델타: 모터가 팔을 회전시키는 대신 선형 액추에이터를 구동한다. 회전 델타 배열보다 훨씬 큰 작업 범위를 가질 수 있다.[11][12]
대부분의 델타 로봇은 회전 액추에이터를 사용하지만, 최근에는 수직 선형 액추에이터를 3D 프린터에 사용하기도 한다(선형 델타 디자인).[13][14] 이는 기존의 리드 스크류 기반 3D 프린터보다 하드웨어 투자를 고려할 때 더 큰 빌드 볼륨에 빠르게 접근할 수 있다는 장점이 있다.
3. 3. 다양한 설계 방식
델타 로봇은 병렬 로봇의 한 종류로, 베이스와 엔드 이펙터를 연결하는 여러 개의 운동 사슬로 구성된다. 이 로봇은 사각 링크의 공간적 일반화로도 볼 수 있다.[9]델타 로봇의 핵심은 평행사변형을 사용하여 엔드 플랫폼의 움직임을 X, Y, Z 방향으로만 움직이도록 제한하는 것이다. 즉, 회전 없이 순수한 병진 운동만 가능하다.
로봇의 베이스는 작업 공간 위에 장착되며, 모든 액추에이터는 베이스에 위치한다. 베이스에서 세 개의 중간 관절 팔이 뻗어 나오며, 이 팔의 끝은 작은 삼각 플랫폼에 연결된다. 입력 링크를 작동시키면 삼각 플랫폼이 X, Y, Z 방향으로 움직인다. 선형 액추에이터나 회전 액추에이터를 사용하여 작동시킬 수 있으며, 감속기 유무에 따라 직접 구동 메커니즘을 사용할 수도 있다.
액추에이터가 모두 베이스에 있기 때문에 팔은 가벼운 복합 재료로 만들 수 있다. 따라서 델타 로봇의 움직이는 부분은 관성이 작아 매우 빠른 속도와 높은 가속도를 낼 수 있다. 모든 팔이 엔드 이펙터에 함께 연결되어 로봇의 강성은 높아지지만, 작업 범위는 줄어든다.
레이몽 클라벨이 개발한 버전은 네 개의 자유도를 갖는다.[7] 세 개의 병진 운동과 한 개의 회전 운동이다. 이 경우 네 번째 다리가 베이스에서 삼각 플랫폼 중앙까지 뻗어 나와 엔드 이펙터에 수직 축을 중심으로 하는 네 번째 회전 자유도를 제공한다.
최근에는 다양한 델타 로봇 설계 방식이 개발되고 있다.
| 종류 | 특징 |
|---|---|
| 6자유도 델타 | 화낙에서 개발. 엔드 이펙터에 3개의 회전 자유도를 가진 직렬 운동학을 배치했다. |
| 4자유도 델타 | 아데프트 테크놀로지에서 개발. 엔드 이펙터 중앙에 네 번째 다리가 있는 대신 엔드 플랫폼에 직접 연결된 4개의 평행사변형을 가지고 있다. |
| 포켓델타 로봇 | 스위스 회사 [https://www.asyril.com/en/products/modules.html Asyril SA]에서 개발. 유연한 부품 공급 시스템 및 기타 고속, 고정밀 응용 분야에 적합한 3축 델타 로봇이다. |
| 델타 직접 구동 | 모터가 팔에 직접 연결된 3자유도 델타 로봇. 가속도는 30[10]에서 최대 100g까지 매우 높을 수 있다. |
| 델타 큐브 | EPFL 대학교 실험실 LSRO에서 개발. 플렉셔 힌지 조인트가 있는 모놀리식 디자인으로 제작되어 초고정밀 응용 분야에 적합하다. |
| 선형 델타 | 모터가 팔을 회전시키는 대신 선형 액추에이터를 구동한다. 회전 델타 배열보다 훨씬 큰 작업 범위를 가질 수 있다.[11][12] |
대부분의 델타 로봇은 회전 액추에이터를 사용하지만, 최근에는 수직 선형 액추에이터가 3D 프린터의 새로운 설계를 위해 사용되기도 한다(선형 델타 디자인 사용).[13][14] 이는 기존의 리드 스크류 기반 3D 프린터보다 하드웨어 투자를 고려할 때 더 큰 빌드 볼륨에 빠르게 접근할 수 있다는 장점이 있다.
4. 응용
델타 로봇은 빠른 속도와 강성을 활용하여 다양한 분야에 응용된다. 식품, 제약, 전자 산업뿐만 아니라 수술용 로봇, 햅틱 컨트롤러, 3D 프린터 등에도 활용된다.[23]
4. 1. 주요 활용 분야
델타 로봇은 빠른 속도를 활용하여 식품, 제약, 전자 산업에서 주로 사용된다.[16][17] 강성이 높아 수술용으로도 사용되는데, 특히 서지스코프(Surgiscope)는 미세한 홀더 시스템으로 사용되는 델타 로봇이다.[18]델타 로봇 구조는 햅틱 컨트롤러 제작에도 활용된다.[19] 최근에는 3D 프린터에도 이 기술이 적용되고 있다.[20]
4. 2. 대한민국 내 응용 사례
델타 로봇의 빠른 속도는 식품, 제약, 전자 산업에서 활용된다. 강성 때문에 수술에도 사용되며, 특히 서지스코프(Surgiscope)는 미세한 홀더 시스템으로 사용되는 델타 로봇이다.델타 로봇의 구조는 햅틱 컨트롤러를 만드는 데에도 사용될 수 있다. 최근에는 이 기술이 3D 프린터에 적용되었다.[23]
참조
[1]
웹사이트
Sketchy, a home-constructed drawing robot
http://www.jarkman.c[...]
Jarkman
[2]
간행물
Delta Parallel Robot — the Story of Success
http://www.parallemi[...]
2001
[3]
간행물
The True Origins of Parallel Robots
http://www.parallemi[...]
[4]
웹사이트
Robotics News & Articles
http://www.botjunkie[...]
[5]
특허
Device for the movement and positioning of an element in space
1990-12-11
[6]
뉴스
Reymond Clavel, creator of the Delta Robot reflects on his career
http://sti.epfl.ch/p[...]
EPFL
2018-01-19
[7]
학위논문
Conception d'un robot parallèle rapide à 4 degrés de liberté
http://library.epfl.[...]
EPFL, Lausanne, Switzerland
1991
[8]
뉴스
Harvard's milliDelta Robot Is Tiny and Scary Fast
https://spectrum.iee[...]
IEEE Spectrum
2018-01-17
[9]
서적
Parallel Robots
Kluwer Academic Publishers
2000
[10]
저널
"Modeling of Dynamics and Model-Based Control of DELTA Direct-Drive Parallel Robot,"
1995
[11]
문서
"Gallery of robots - prof. Reymond Clavel"
http://issuu.com/epf[...]
[12]
문서
Robots parallèles
http://jnrr2011.ircc[...]
2018-09-20
[13]
웹사이트
Rostock (delta robot 3D printer)
http://www.thingiver[...]
Thingiverse
2012-02-06
[14]
웹사이트
3D printing with a delta robot that seems to simplify the concept
http://hackaday.com/[...]
2012-07-13
[15]
뉴스
Hoosier Daddy – The Largest Delta 3D Printer in the World
http://www.3dprinter[...]
Punchbowl Media
2014-09-28
[16]
웹사이트
Delta Parallel Robot - the Story of Success
https://www.parallem[...]
2023-12-30
[17]
웹사이트
New Delta Robots Handle Primary Food Packaging
https://www.packworl[...]
2022-08-01
[18]
서적
Effective geometrical calibration of a delta parallel robot used in neurosurgery
https://ieeexplore.i[...]
2005
[19]
웹사이트
Feeling virtual worlds
http://sunnybains.ty[...]
2007-08-08
[20]
저널
An energy-efficient approach for 3D printing with a Linear Delta Robot equipped with optimal springs
https://linkinghub.e[...]
2021
[21]
웹사이트
Fanuc Robot M-01iA
http://www.fanuc.co.[...]
2015-05-12
[22]
웹인용
Robotics News & Articles
http://www.botjunkie[...]
[23]
저널
An energy-efficient approach for 3D printing with a Linear Delta Robot equipped with optimal springs
https://linkinghub.e[...]
2021
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com