보잉 X-50
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
보잉 X-50은 보잉과 DARPA가 공동으로 개발한 실험적인 VTOL(수직 이착륙) 항공기이다. 1998년부터 개발이 시작되어 2대의 시제기가 제작되었으며, 카나드 형식의 앞날개와 일반적인 수평 꼬리 날개를 갖추고 있다. X-50은 단일 터보팬 엔진으로 구동되며, 회전익 모드에서는 엔진 배기가스가 로터 블레이드 끝의 노즐로 전환되어 팁 제트 추진 방식을 사용하고, 고속 전진 비행 시에는 배기가스가 일반 제트 노즐을 통해 재분배되고 로터는 고정되어 일반 비행기와 유사하게 작동하도록 설계되었다. 2003년 첫 비행을 했지만, 두 차례의 추락 사고로 인해 프로그램이 중단되었다.
더 읽어볼만한 페이지
- 방위고등연구계획국 - 그루먼 X-29
그루먼 X-29는 그루먼사가 제작한 전진익 설계를 특징으로 하는 실험기로, 탄소 섬유 복합재 기술과 컴퓨터 비행 제어 시스템을 통해 고기동성을 확보했으며, 플라이 바이 와이어 등의 기술을 실증했다. - 방위고등연구계획국 - 보잉 X-46
- 2003년 첫 비행한 항공기 - 스페이스십원
스페이스십원은 스케일드 컴포지츠사에서 제작한 3인승 준궤도 우주선으로, 하이브리드 로켓 엔진과 독특한 꼬리날개 설계를 통해 민간 자금으로 유인 우주 비행에 최초로 성공하며 안사리 X상을 수상했다. - 2003년 첫 비행한 항공기 - 에어버스 A310 MRTT
에어버스 A310 MRTT는 에어버스 A310-300C를 기반으로 개발된 다목적 군용기로, 공중 급유, 화물 및 병력 수송, 항공 의료 후송 임무를 수행하며 독일과 캐나다 공군에서 운용되고 A310 기체 생산 중단으로 기존 항공기 개조를 통해서만 생산 가능하다. - 미국의 무인 항공기 - MQ-9 리퍼
MQ-9 리퍼는 고고도에서 장시간 체공하며 정찰, 감시, 공격 임무를 수행하는 무인 공격기로, 다양한 센서와 무장을 탑재하여 다목적 임무 수행이 가능하며 여러 파생형과 업그레이드를 통해 활용성을 넓혀가고 있다. - 미국의 무인 항공기 - 록히드마틴 RQ-170 센티넬
RQ-170 센티넬은 록히드 마틴에서 개발한 스텔스 무인 항공기로, 정찰 임무를 수행하며 무장은 탑재하지 않고, 2000년대 후반부터 운용되었으며, 2011년 이란에 의해 노획되기도 했다.
| 보잉 X-50 | |
|---|---|
| X-50 드래곤플라이 | |
 | |
| 기종 개요 | |
| 종류 | 실험용 UAV 회전익기 |
| 제작사 | 보잉 |
| 설계자 | null |
| 최초 비행 | 2003년 11월 24일 |
| 도입 | null |
| 퇴역 | null |
| 현황 | 취소됨 |
| 주요 운용 기관 | DARPA |
| 추가 운용 기관 | null |
| 생산 대수 | 2대 |
| 개발 기반 | null |
| 파생형 | null |
| 발전형 | null |
2. 개발
보잉은 처음에 V-22 틸트로터를 호위하는 데 적합한 VTOL 항공기에 대한 요구 사항을 충족하기 위해 CRW(Canard Rotor/Wing) 구성을 사용할 것을 제안했다. X-50A는 보잉과 DARPA의 공동 프로그램으로, 개발 비용은 양측이 절반씩 부담했다. 1998년부터 개발이 시작되었으며, 기술 개발을 목적으로 두 대의 개념 증명 항공기가 제작되었다.[2] X-50A는 단일의 기존 터보팬 엔진으로 구동되었다. 회전익 모드에서는 엔진의 배기가스가 로터 블레이드 끝에 있는 노즐로 전환되었다. 항공기가 완전 순항 비행으로 전환될 때, 엔진 배기가스는 항공기 후면의 노즐을 통해 유도되었고 로터는 고정 위치에 고정되어 기존의 날개 역할을 했다.[2] X-50A의 첫 비행은 2003년 11월 24일에 이루어졌다.[2]
X-50은 카나드 형식의 앞날개와 일반적인 수평 꼬리 날개를 가지고 있어, 전진 비행 중에 양력을 발생시키고 주 로터 날개에 가해지는 부담을 줄일 수 있도록 설계되었다. 수직 이륙, 호버링, 저속 비행 및 수직 착륙 시에는, 주 로터 날개가 제트 엔진에서 나오는 배기가스를 로터 끝단에 위치한 추력 노즐을 통해 분사하는 방식으로 작동하는 팁 제트 추진 방식을 사용한다. 로터가 제트 추력에 의해 직접 구동되기 때문에, 기존 헬리콥터처럼 토크를 제어하기 위한 테일 로터가 필요하지 않다.
3. 설계
고속 전진 비행 시에는, 배기가스가 일반적인 제트 노즐을 통해 재분배되고 로터 날개는 정지하여 고정된 위치에 유지되는데, 이는 일반적인 비행기와 유사하다. 제트 배기를 사용하는 방법은 기체 각 부분이 고온이 되므로 이를 극복할 필요가 있지만, 구조는 간소화되는 것이 장점이다.
4. 운용
4. 1. 사고
2004년 3월 23일, X-50A 시제기의 세 번째 비행 중, 제어 장치의 교차 결합으로 인해 1호기가 추락했다.[2] 이후 개선된 두 번째 시제기("Ship 2")가 제작되었으나, 2006년 4월 12일, 유마 성능 시험장에서 계획된 11번의 시험 비행 중 여섯 번째 비행에서 2호기 역시 추락하여 완전히 파괴되었다.[2] 조사 결과, 항공기의 동체는 극도로 민감한 공기역학적 피칭 모멘트의 영향을 받는 것으로 밝혀졌다. 기체 속도와 회전익 후류 모두 조종 장치가 보상할 수 있는 범위를 초과하는 기수 들림 피칭 운동을 유발했다.[2]
4. 2. 결과
완료된 시험 비행 프로그램에서 두 항공기 모두 완전 전진 비행 모드로의 전환을 달성하지 못했다.[2] 2006년 9월, 방위고등연구계획국(DARPA)은 내재된 설계 결함을 인지하고 이 프로그램에 대한 자금 지원을 철회했다.[2]
5. 제원
wikitext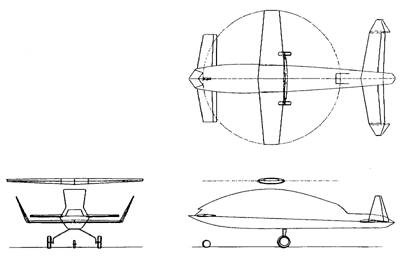
- '''승무원:''' 없음 (무인기)
- '''길이:''' 5.38m
- '''중앙 날개폭:''' 2.69m
- '''하부 날개폭:''' 2.47m
- '''높이:''' 1.98m
- '''자체 중량:''' 574kg
- '''최대 이륙 중량:''' 645kg
- '''연료 탑재량:''' 66kg
- '''엔진:''' 1 × 윌리엄스 F112 터보팬
- '''메인 로터 직경:''' 3.7m
- '''용량:''' 91kg
- '''최대 속도:''' 700km/h
- '''순항 속도:''' 278km/h
5. 1. 일반 특성
- 승무원: 없음 (무인기)
- 길이: 5.38m
- 중앙 날개폭: 2.69m
- 하부 날개폭: 2.47m
- 높이: 1.98m
- 자체 중량: 574kg
- 최대 이륙 중량: 645kg
- 연료 탑재량: 66kg
- 엔진: 1 × 윌리엄스 F112 터보팬
- 메인 로터 직경: 3.7m
- 용량: 91kg
5. 2. 성능
- 최대 속도: 700km/h
- 순항 속도: 278km/h
참조
[1]
웹사이트
X-50 Dragonfly Canard Rotor/Wing (CRW)
http://www.globalsec[...]
2009-03-13
[2]
간행물
One Step Beyond
Rotor & Wing
2007-02
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com