이체 문제
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
이체 문제는 두 물체 사이의 상호 작용을 다루는 고전역학 문제로, 천체 역학 연구에서 시작되었다. 요하네스 케플러는 튀코 브라헤의 관측 자료를 분석하여 행성 운동에 관한 케플러의 법칙을 발견했고, 아이작 뉴턴은 이를 역제곱 법칙으로 설명하며 궤도 계산법을 개발했다. 이체 문제는 두 물체의 질량 중심 운동과 상대 운동으로 분리하여 해석할 수 있으며, 두 물체의 초기 위치와 속도를 통해 궤적을 계산한다. 이 과정에서 질량 중심은 등속 직선 운동을 하며, 변위 벡터는 환산 질량을 가진 하나의 물체로 간주하여 케플러 문제로 해결할 수 있다. 이체 문제는 각운동량 보존 법칙에 의해 평면 위에서 움직이며, 중심력의 형태를 갖는 힘을 적용한다. 상대 운동에서 한 물체는 다른 물체를 기준으로 원, 타원, 포물선, 쌍곡선 궤도를 그리며, 중력 하에서 타원형 패턴으로 공전한다. 하지만 이체 문제 모델은 고전역학의 적용 한계로 인해 원자 및 아원자 입자에는 적용되지 않으며, 양자역학을 통해 전자의 거동을 이해해야 한다.
더 읽어볼만한 페이지
- 천체역학 - 공전
공전은 천문학에서 어떤 천체가 다른 천체의 중심 주위를 회전하는 운동을 의미하며, 태양계 행성, 위성, 은하 내 항성 등 다양한 천체에서 관찰되고, 케플러의 법칙에 따라 공전 주기가 결정된다. - 천체역학 - 중력
중력은 질량을 가진 두 물체 사이에 작용하는 인력으로, 그 크기는 두 물체의 질량의 곱에 비례하고 거리의 제곱에 반비례하며, 지구에서는 물체를 아래로 떨어뜨리는 힘으로 작용하고, 일반 상대성 이론에서는 시공간의 곡률로 설명되며, 현대 물리학에서는 양자 중력 이론과 중력파 관측을 통해 연구되고 있다. - 고전역학 - 천체역학
천체역학은 중력에 의해 지배되는 천체의 운동을 다루는 학문으로, 케플러 운동 법칙, 섭동 이론, 다체 문제 등을 포함하며, 뉴턴의 만유인력 법칙과 해석역학을 기반으로 발전하여 우주 탐사 및 행성 형성 연구에 기여한다. - 고전역학 - 해밀토니언 (양자역학)
양자역학에서 해밀토니언은 계의 총 에너지를 나타내는 연산자로서, 고전역학의 해밀토니안에서 유래하며 슈뢰딩거 방정식을 통해 계의 시간적 진화를 결정하고, 그 고유값은 허용된 에너지 준위를 나타낸다. - 물리학 개념 - 절연체
절연체는 전기 전도성을 막아 전기의 흐름을 제어하고 안전을 확보하며, 밴드 이론에 따라 큰 띠틈을 가져 외부 전압이 띠틈을 넘어서면 절연 파괴가 발생하며, 유리에서 세라믹, 고분자 복합 재료 등으로 제작되어 전선, 케이블 등 다양한 분야에 사용된다. - 물리학 개념 - 전기 전도체
전기 전도체는 전기를 잘 통하는 물질로, 금속, 전해질, 초전도체, 반도체 등이 있으며, 구리, 은, 알루미늄 등 다양한 재료가 전선 등에 사용된다.
| 이체 문제 | |
|---|---|
| 개요 | |
| 분야 | 고전역학 |
| 문제 | 두 물체의 운동 |
| 설명 | |
| 설명 | 두 물체 간의 상호작용에 대한 운동을 다룸 |
| 유형 | |
| 유형 | 케플러 문제 중력 문제 |
| 중요성 | |
| 중요성 | 천체 역학의 기초 행성 운동 연구 |
| 관련 개념 | |
| 관련 개념 | 중심력 에너지 보존 각운동량 보존 |
| 해결 방법 | |
| 해결 방법 | 좌표 변환 유효 퍼텐셜 케플러 법칙 유도 |
2. 역사
이체 문제 연구는 천체 역학에서 시작되었다. 이체 문제의 역사는 독일의 천문학자 요하네스 케플러로부터 시작된다. 케플러는 덴마크의 천문학자 튀코 브라헤의 정밀 천체 관측 자료를 분석하여 행성의 운동에 관한 케플러의 법칙을 발견하였다. 이후 영국의 물리학자 아이작 뉴턴, 에드먼드 핼리 등은 천체 간의 거리의 제곱에 반비례하는 힘으로 케플러의 법칙을 설명할 수 있다는 사실을 발견하고, 뉴턴은 이를 이용해 프린키피아에서 수학적으로 행성들이 타원 궤도를 돈다는 것을 보였다. 또한, 뉴턴은 행성의 질량, 위치, 속도 정보를 이용하여 궤도를 계산하는 법을 개발했다. 뉴턴 이후 레온하르트 오일러는 '행성과 혜성의 운동'에서 오일러 방법을 이용하여 천체의 포물선 운동을 수학적으로 보였다. 핼리는 뉴턴의 법칙을 통해 핼리 혜성 등 혜성의 주기를 알아내는 데 성공했으며 이후 요한 람베르트는 오일러 방법을 일반화하여 행성의 타원, 쌍곡선 궤도를 수학적으로 계산해내었다. 이후 조제프루이 라그랑주는 행성 간의 각도들을 이용하여 궤도를 계산하는 새로운 방법을 개발했다. 이 방법은 카를 프리드리히 가우스에 의해 훨씬 개선되었고, 현재도 계속 사용되고 있다.[1]
3. 두 개의 독립된 일체 문제로의 변환
이체 문제는 두 물체의 질량 중심 운동과 두 물체 사이의 상대적인 운동, 두 개의 독립된 일체 문제로 분리하여 해석할 수 있다.
두 물체의 위치를 각각 , 라 하고, 각 물체의 질량을 , 라 하자. 이체 문제를 푼다는 것은 주어진 초기 위치 , 와 초기 속도 , 를 가지고 각 물체의 궤적 과 를 시간 에 대해 구하는 것이다.
각 물체에 대해 뉴턴의 운동 제2 법칙을 적용하면 다음과 같다.
:
:
는 물체1에 가해지는 물체2와의 상호작용에 의한 힘이고, 은 물체2에 가해지는 물체1과의 상호작용에 의한 힘이다.
위의 두 식을 더하고 빼는 과정을 통해 이체 문제를 두 개의 독립적인 일체 문제로 분리할 수 있다. (1)과 (2)를 더하면 이 계의 질량 중심의 운동을 시간에 대해 나타내는 식이 나오고, 두 식을 빼면 두 물체를 잇는 벡터 의 시간에 대한 식이 나온다. 이 두 식의 해를 이용하여 각 물체의 궤적 과 를 구할 수 있다.
3. 1. 질량 중심의 운동
두 물체 각각의 위치를 , 라하고, 과 를 각각의 질량이라 한다. 각각의 물체에 대하여 뉴턴의 운동 제2 법칙을 적용해보면 다음과 같다.
:
:
는 물체1에 가해지는 물체2와의 상호작용에 의한 힘이고, 은 물체2에 가해지는 물체1과의 상호작용에 의한 힘이다.
위의 두 식을 더하면 이 계의 질량 중심의 운동을 시간에 대해 나타내는 식이 나온다. (1)과 (2)를 더하여 아래의 식을 얻을 수 있다.
:
여기서 뉴턴의 운동 제3 법칙에 의하여 이고,
:
:은 이 계의 질량 중심이다. 결과적으로는
:
이다.
이 식을 통해 질량 중심의 속도 는 일정함을 알 수 있고 총 운동량 도 일정함을 알 수 있다. (운동량 보존 법칙). 그러므로 질량 중심의 변위 는 두 물체의 초기 위치와 초기 속도를 가지고 언제나 구할 수 있다.
을 계의 질량 중심(바리센터)의 위치라고 할때, 힘 방정식 (1)과 (2)를 더하면 다음과 같다.
:
여기서 뉴턴의 제3법칙을 사용했으며,
:이다.
결과적으로 다음 방정식을 얻는다.
:
이것은 질량 중심의 속도 가 일정함을 보여주며, 따라서 총 운동량도 일정하다(운동량 보존). 따라서 질량 중심의 위치는 초기 위치와 속도로 언제든지 결정할 수 있다.
식 (1)과 식 (2)를 더하면,
:
이 된다. 여기서, 두 번째 등호는 작용 반작용의 법칙 을 사용했다. 이를 변형하면
:
이 되며, 이것은 질량중심의 위치를 나타낸다. 여기서 얻어지는 식
:
은 질량중심의 속도와 전체 운동량가 일정함을 의미한다.
즉, 질량중심의 위치와 속도는 초기 위치와 초기 속도로부터 유일하게 결정된다.
3. 2. 변위 벡터의 운동
두 물체를 잇는 변위 벡터는 환산 질량을 가진 하나의 물체가 중심력의 영향을 받아 움직이는 것으로 해석할 수 있다. 이 문제는 고전 중심력 문제 또는 케플러 문제로 알려져 있다.[3]
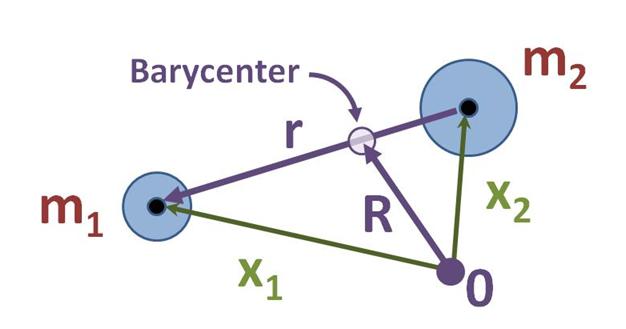
두 물체의 위치를 각각 ${\mathbf{x}}_{1}$, ${\mathbf{x}}_{2}$라 하고, 각 물체의 질량을 ${m}_{1}$, ${m}_{2}$라 하자. 이체 문제를 푼다는 것은 주어진 초기 위치 ${\mathbf{x}}_{1}({t}=0)$, ${\mathbf{x}}_{2}({t}=0)$와 초기 속도 ${\mathbf{v}}_{1}({t}=0)$, ${\mathbf{v}}_{2}({t}=0)$를 가지고 각 물체의 궤적 ${\mathbf{x}}_{1}({t})$, ${\mathbf{x}}_{2}({t})$를 시간 ${t}$에 대해 구하는 것이다.
각 물체에 대해 뉴턴의 운동 제2 법칙을 적용하면 다음과 같다.
:
:
여기서 ${\mathbf{F}}_{12}$는 물체 1이 물체 2와의 상호작용으로 받는 힘이고, ${\mathbf{F}}_{21}$은 물체 2가 물체 1과의 상호작용으로 받는 힘이다.
위의 두 식을 더하고 빼는 과정을 통해 이체 문제를 두 개의 독립적인 일체 문제로 분리할 수 있다. 식 (1)과 (2)를 더하면 이 계의 질량 중심 운동을, 두 식을 빼면 두 물체를 잇는 벡터 ${\mathbf{r}} = {\mathbf{x}}_{1} - {\mathbf{x}}_{2}$의 시간에 대한 식을 얻는다.
식 (1)과 (2)를 각 물체의 질량으로 나누고, (1)에서 (2)를 뺀 후 정리하면 다음과 같다.
:
여기서 뉴턴의 운동 제3 법칙에 의해 ${\mathbf{F}}_{12} =- {\mathbf{F}}_{21}$이고, ${\mathbf{r}}$은 물체 2에서 물체 1을 가리키는 변위 벡터이다.
두 물체 간 힘은 두 물체 간 상호작용에 의해서만 결정되므로, ${\mathbf{x}}_{1}$과 ${\mathbf{x}}_{2}$를 포함하지 않고 오직 ${\mathbf{r}}$에만 의존한다. 따라서 위 식은 다음과 같이 쓸 수 있다.
:
여기서 는 환산 질량이다.
:
${\mathbf{R}}({t})$와 ${\mathbf{r}}({t})$가 구해지면, 각 물체의 궤적은 다음과 같이 구할 수 있다.
:
:
3. 3. 원래 궤적의 계산
두 물체의 위치를 각각 , 라 하고, 각 물체의 질량을 , 라고 하자. 이체 문제의 목표는 초기 위치 , 와 초기 속도 , 가 주어졌을 때, 각 물체의 궤적 과 를 시간 에 대해 구하는 것이다.
뉴턴의 운동 제2 법칙을 각 물체에 적용하면 다음과 같다.
:
:
여기서 는 물체 2가 물체 1에 작용하는 힘이고, 은 물체 1이 물체 2에 작용하는 힘이다.
위의 두 식을 더하고 빼는 과정을 통해, 이체 문제를 두 개의 독립적인 일체 문제로 분리할 수 있다. 식 (1)과 (2)를 더하면 계의 질량 중심 운동을 나타내는 방정식을 얻고, 두 식을 빼면 두 물체를 잇는 벡터 의 시간에 대한 방정식을 얻는다. 이 두 방정식의 해를 결합하여 각 물체의 궤적 과 를 계산할 수 있다.
와 가 구해지면, 각 물체의 궤적은 다음과 같이 계산된다.
:
:
이 식들은 과 의 정의를 우변에 대입해보면 쉽게 확인할 수 있다.
4. 평면상의 이체 문제
두 물체는 각운동량 보존 법칙에 의해 항상 한 평면 위에서 움직인다. 각운동량은 두 물체를 잇는 선과 같은 방향으로 힘이 작용할 때 보존된다.
운동량 와 각운동량 을 정의하면 아래와 같다.
:
의 시간에 따른 변화는 알짜 돌림힘 과 같고,
:
방향이 같은 두 벡터의 외적은 0이라는 외적의 성질을 이용하면,
:
이고, 이다.
두 물체 사이의 힘이 두 물체를 잇는 선과 같은 방향이라고 가정하면, ×이고 이는 각운동량 벡터 이 일정함을 의미한다. 그러므로 변위 벡터과 속도 벡터 는 언제나 에 수직인 평면 위에 함께 존재하게 된다.
5. 중심력
대부분의 물리 문제에서 중심력 '''F'''('''r''')은 다음과 같은 형태를 가진다.
:'''F'''('''r''') = F(r)'''r̂'''
여기서 ''r'' = |'''r'''|이고 '''r̂''' = '''r'''/''r''는 해당 단위 벡터이다. 이제 다음을 얻는다.
:
여기서 F(''r'')는 인력의 경우 음수이다.
6. 일
이체 문제에서 두 물체가 서로에게 작용한 힘에 의한 일은 한 힘이 물체 사이의 상대 변위에 곱해진 것과 같다.[1]
7. 상대 운동
이체 문제에서 한 물체가 다른 물체를 관측할 때, 그 다른 물체는 그 물체의 속도와 위치에 따라 원, 타원, 포물선, 쌍곡선의 네 가지 이차곡선 궤도 중 하나를 그린다.[1]
중력 작용 아래에서, 이 두 물체는 각각 서로 완전히 벗어날 만큼 충분히 빠르지 않다면 서로의 질량 중심을 타원형 패턴으로 공전한다. 그렇지 않은 경우, அவற்றின் 경로는 다른 평면 원추곡선을 따라 갈라진다. 한 물체가 다른 물체보다 훨씬 무거우면, 공유 질량 중심을 기준으로 다른 물체보다 훨씬 적게 움직인다. 상호 질량 중심은 더 큰 물체 안에 있을 수도 있다.[1]
8. 적용의 한계
두 물체를 점입자로 취급하는 이체 문제 모델은 고전역학이 거시적 규모의 계에만 적용되기 때문에 원자 및 아원자 입자에는 적용되지 않는다. 대부분 아원자 입자의 거동은 이 문서의 기본이 되는 고전적 가정하에서는 예측할 수 없으며, 여기에 제시된 수학적 방법으로도 예측할 수 없다.
원자의 전자는 때때로 핵을 "공전"하는 것으로 묘사되기도 하는데, 이는 닐스 보어의 초기 가설에서 유래한 것으로("궤도 함수"라는 용어의 출처이기도 하다). 그러나 전자는 실제로는 의미 있는 방식으로 핵을 공전하지 않으며, 전자의 실제 거동을 이해하려면 양자역학이 필요하다. 원자핵을 공전하는 전자에 대한 고전적인 이체 문제를 푸는 것은 오해의 소지가 있으며, 유용한 통찰력을 거의 제공하지 않는다.
참조
[1]
논문
The Sturm-Liouville problem of two-body system
2020-06-22
[2]
서적
Differential Equations
https://archive.org/[...]
Springer
2001-01-01
[3]
서적
Differential Equations
http://books.google.[...]
Springer
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com