적도의
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
적도의는 천문 망원경 가대의 한 종류로, 천구의 적도를 기준으로 하여 천체의 움직임을 추적할 수 있도록 설계되었다. 적도축과 적위축을 사용하여 천체의 위치를 찾고, 시계 구동 장치를 통해 하늘의 겉보기 일주 운동에 맞춰 회전한다. 독일식, 포크식, 영국식, 교차축식, 말굽식 등 다양한 종류가 있으며, 천체 사진 촬영에 특히 유용하다. 최근에는 전산화된 추적 및 자동 도입(Go-to) 시스템이 보편화되었다.
더 읽어볼만한 페이지
| 적도의 | |
|---|---|
| 개요 | |
 | |
| 목적 | 천체의 일주 운동을 보상하기 위한 장치 |
| 작동 원리 | 지구 자전축과 평행한 축을 중심으로 회전 |
| 구조 및 원리 | |
| 주요 축 | 적경축 (Polar axis 또는 Right ascension axis) 적위축 (Declination axis) |
| 적경축 | 지구 자전축과 평행하게 정렬 |
| 적위축 | 적경축에 수직하게 위치 |
| 작동 방식 | 적경축 회전: 천체의 일주 운동 추적 적위축 조정: 천체의 적위 설정 |
| 종류 | |
| 독일식 적도의 (German Equatorial Mount, GEM) | 특징: 망원경 반대쪽에 균형추를 배치 장점: 안정적인 구조, 대형 망원경에 적합 단점: 자오선 넘어서는 관측 시 어려움 |
| 포크식 적도의 (Fork Equatorial Mount) | 특징: 포크 모양의 지지대로 망원경 지지 장점: 비교적 간단한 구조 단점: 대형 망원경에 부적합, 특정 각도에서 간섭 발생 가능성 |
| 잉글리시 마운트 (English Mount) | 특징: 대형 적경축을 사용 장점: 매우 안정적인 구조 단점: 복잡하고 무거움 |
| 호스슈 마운트 (Horseshoe Mount) | 특징: 말굽 모양의 지지대로 적경축을 지지 장점: 극지방 관측에 용이 단점: 제작 난이도가 높음 |
| 플랫폼 마운트 (Platform Mount) | 특징: 지면에 설치된 플랫폼 위에 망원경을 설치 장점: 대형 망원경에 적합 단점: 이동이 어려움 |
| 기타 | 비크닉 마운트 (Vicknic mount) 듀얼 포크 마운트 (Dual-fork mount) 크로스 액시스 마운트 (Cross-axis mount) |
| 장점 | |
| 천체 추적 용이성 | 원리: 적경축을 이용한 간단한 회전만으로 천체 추적 가능 장점: 장시간 노출 사진 촬영에 유리 |
| 좌표 설정 | 기능: 천체의 적경과 적위를 쉽게 설정 가능 장점: 천체 위치 파악 및 자동 도입 시스템에 적합 |
| 단점 | |
| 복잡한 구조 | 특징: 고도-방위각 마운트에 비해 구조가 복잡 단점: 설치 및 사용에 어려움이 있을 수 있음 |
| 정렬 필요 | 특징: 정확한 극축 정렬 필요 단점: 정렬 오차 발생 시 추적 정확도 저하 |
| 가격 | 특징: 고도-방위각 마운트에 비해 가격이 비쌈 |
| 활용 | |
| 천체 관측 | 망원경 쌍안경 |
| 천체 사진 촬영 | 장시간 노출 사진 |
| 기타 | |
| 극축 정렬 (Polar Alignment) | 중요성: 적도의 성능에 중요한 영향 방법: 다양한 방법 존재 (극성, 드리프트 정렬 등) |
2. 역사
천문 망원경 가대에서 적도축(즉, 적경)은 두 번째 수직 좌표축(적위)과 짝을 이룬다. 가대의 적도축에는 종종 전동 "시계 구동" 장치가 장착되어 있는데, 이는 하늘의 겉보기 일주 운동에 정확히 맞춰 23시간 56분마다 한 바퀴 회전한다.[3] 또한 눈금환을 장착하여 천구 좌표로 천체의 위치를 찾을 수 있다. 적도 가대는 기계적으로 더 단순한 고도 방위 가대와는 다르다. 고도 방위 가대는 하늘의 고정된 천체를 추적하기 위해 두 축 모두에서 가변 속도 운동이 필요하다. 또한, 천체 사진 촬영의 경우, 회전하는 도립 프리즘 또는 기타 시야 회전 방지 장치가 설치되지 않는 한, 표적의 움직임을 추적하도록 유도될 때 고도 방위 가대에서 발생하는 것처럼 초점면에서 이미지가 회전하지 않는다.
적도의는 천체의 일주 운동을 추적하기 위한 회전축을 가진 천체 망원경 전용 가대이다.[12] 필드 스코프에는 사용하지 않는다.
적도 망원경 가대는 다양한 디자인으로 제공되었다. 지난 20년 동안 전동 추적은 점점 더 전산화된 천체 위치 탐색으로 보완되었다. 크게 두 가지 유형이 있는데, 디지털 눈금환은 인코더에 연결된 천체 데이터베이스가 있는 소형 컴퓨터를 사용하며, 컴퓨터는 하늘에서 망원경의 위치를 모니터링하고 사용자는 망원경을 밀어야 한다. Go-to 시스템은 (대부분의 경우) 서보 또는 스테퍼 모터로 구동되는 웜 및 링 기어 시스템을 사용하며, 사용자는 하늘에서 위치를 변경하기 위해 기기를 전혀 만질 필요가 없다. 이러한 시스템의 컴퓨터는 일반적으로 제어 "패들"로 휴대하거나 전자 카메라에서 이미지를 캡처하는 데에도 사용되는 인접한 랩톱 컴퓨터를 통해 제공된다. 최신 망원경 시스템의 전자 장치에는 종종 자동 가이드용 포트가 포함되어 있는데, 특수 기기는 별을 추적하고 하늘을 촬영하는 동안 망원경의 위치를 조정한다. 이렇게 하려면 자동 가이더가 망원경의 제어 시스템을 통해 명령을 내릴 수 있어야 하며, 이러한 명령은 망원경을 움직이는 웜 구동으로 인한 주기적 오류와 같이 추적 성능의 매우 작은 오류를 보상할 수 있다.
새로운 관측소 설계에서 적도 가대는 대규모 전문 분야에서 수십 년 동안 선호되지 않았다. 대형 신규 기기는 고도-방위각(상하, 좌우) 구성으로 장착될 때 가장 안정적이다. 전산화된 추적 및 시야 회전 방지는 전문적인 수준에서 구현하기 어렵지 않다. 그러나 아마추어 수준에서는 적도 가대가, 특히 천체 사진 촬영에 여전히 인기가 있다.
극축은 수평에 대해 관측지의 위도와 동일한 각도로 기울여[10][11] 지구의 자전축과 평행하게 설치하고,[10][11] 극축을 별의 운동과 동일한 속도인 23시간 56분 4초/주[11]로 회전시키면 별의 일주 운동을 상쇄할 수 있어,[10][11] 장시간 관측 및 사진 촬영이 용이하다.[10] 특히 천체 사진 촬영은 적도의 없이 거의 불가능에 가깝다.[10] 극축에는 1주 24시간의 눈금이 새겨져 있는 경우가 많으며, 시각 눈금과 적경 눈금이 있다. 북반구에서 망원경을 서쪽으로 돌릴 때 숫자가 증가하면 시각 눈금, 감소하면 적경 눈금이다. 두 눈금을 모두 새겨 넣은 제품도 있다.[10] 극축은 웜 기어로 전주 미동으로 되어 있다.[10]
극축 회전에는 미동 핸들을 수동으로 조작하는 경우[11] 외에도, 추와 진자에 의한 운전 시계, 또는 모터 드라이브[10][11]를 사용하는 경우도 있다. 두 축 모두 모터를 장착하고 컴퓨터로 적경 및 적위를 지정하여 목표 천체를 비교적 쉽게 도입할 수 있는 장치도 판매되고 있다.
적위축은 극축과 직각이어야 하지만, 소형 망원경에서는 오차가 있더라도 그다지 큰 문제가 되지 않는다.[10] 설치식 대형 적도의에서는 천구 북극 부근의 관측에 지장이 있다.[10] 적위축은 웜 기어로 전주 미동으로 되어 있는 경우와 스프링식으로 부분 미동에 그치는 제품이 있다.[10]
3. 종류
극축은 수평에 대해 관측지의 위도와 동일한 각도로 기울여[10][11] 지구의 자전축과 평행하게 설치한다.[10][11] 극축을 별의 운동과 동일한 속도인 23시간 56분 4초/주[11]로 회전시키면 별의 일주 운동을 상쇄하여[10][11] 장시간 관측 및 사진 촬영이 용이하다.[10] 특히 천체 사진 촬영은 적도의 없이 거의 불가능하다.[10] 극축에는 1주 24시간 눈금이 새겨져 있으며, 시각 눈금과 적경 눈금이 있다. 북반구에서 망원경을 서쪽으로 돌릴 때 숫자가 증가하면 시각 눈금, 감소하면 적경 눈금이다. 두 눈금을 모두 새겨 넣은 제품도 있다.[10] 극축은 웜 기어로 전주 미동으로 되어 있다.[10]
극축 회전에는 미동 핸들을 수동으로 조작하거나[11], 추와 진자에 의한 운전 시계, 또는 모터 드라이브[10][11]를 사용한다. 두 축 모두 모터를 장착하고 컴퓨터로 적경 및 적위를 지정하여 목표 천체를 비교적 쉽게 도입할 수 있는 장치도 판매되고 있다.
적위축은 극축과 직각이어야 하지만, 소형 망원경에서는 오차가 있더라도 큰 문제가 되지 않는다.[10] 설치식 대형 적도의에서는 천구 북극 부근 관측에 지장이 있다.[10] 적위축은 웜 기어로 전주 미동으로 되어 있거나 스프링식으로 부분 미동에 그치는 제품이 있다.[10]
적도 망원경 가대는 다양한 디자인으로 제공된다. 지난 20년 동안 전동 추적은 점점 더 전산화된 천체 위치 탐색으로 보완되었다. 크게 두 가지 유형이 있는데, 디지털 눈금환은 인코더에 연결된 천체 데이터베이스가 있는 소형 컴퓨터를 사용하며, 컴퓨터는 하늘에서 망원경의 위치를 모니터링하고, 사용자는 망원경을 밀어야 한다. Go-to 시스템은 (대부분의 경우) 서보 또는 스테퍼 모터로 구동되는 웜 및 링 기어 시스템을 사용하며, 사용자는 하늘에서 위치를 변경하기 위해 기기를 전혀 만질 필요가 없다. 이러한 시스템의 컴퓨터는 일반적으로 제어 "패들"로 휴대하거나 전자 카메라에서 이미지를 캡처하는 데에도 사용되는 인접한 랩톱 컴퓨터를 통해 제공된다. 최신 망원경 시스템의 전자 장치에는 종종 자동 가이드용 포트가 포함된다. 특수 기기는 별을 추적하고 하늘을 촬영하는 동안 망원경의 위치를 조정한다. 이렇게 하려면 자동 가이더가 망원경의 제어 시스템을 통해 명령을 내릴 수 있어야 한다. 이러한 명령은 망원경을 움직이는 웜 구동으로 인한 주기적 오류와 같이 추적 성능의 매우 작은 오류를 보상할 수 있다.
최근 새로운 관측소 설계에서 적도 가대는 대규모 전문 분야에서 수십 년 동안 선호되지 않았으며, 대형 신규 기기는 고도-방위각(상하, 좌우) 구성으로 장착될 때 가장 안정적이다. 전산화된 추적 및 시야 회전 방지는 전문적인 수준에서 구현하기 어렵지 않다. 그러나 아마추어 수준에서는 적도 가대가, 특히 천체 사진 촬영에 여전히 인기가 있다.
주로 다음과 같은 종류가 있다.3. 1. 독일식 적도의
'''독일식 적도의'''[4](줄여서 "'''GEM'''"이라고도 함)는 주요 구조가 '''T'''자 모양이다. 아래쪽 막대는 ''적경'' 축(이미지에서 아래쪽 대각선 축)이고, 위쪽 막대는 ''적위'' 축(이미지에서 위쪽 대각선 축)이다. 망원경은 적위 축의 한쪽 끝(이미지 왼쪽 상단)에 배치되고, 적절한 균형추는 다른 쪽 끝(오른쪽 하단)에 배치된다. 적경 축은 T자형 연결점 아래에 베어링이 있으며, 적위 축 위에서는 지지되지 않는다. 이 마운트는 요제프 폰 프라운호퍼가 1824년에 완성된 대(大) 도르파트 굴절기[5]를 위해 개발했다.
소형 망원경에서 적도의식 가대를 사용하는 경우 대부분이 이것이다.[10]
3. 2. 포크식 적도의
'''오픈 포크''' 마운트는 밑면에 적경축에 연결된 ''포크''를 가지고 있다. 망원경은 포크의 반대편 끝에 있는 두 개의 회전점에 부착되어 있어 적위 방향으로 회전할 수 있다. 대부분의 현대식 대량 생산된 반사 굴절 망원경(구경 200mm 이상)이 이 유형이다.[6] 이 마운트는 고도 방위 마운트와 유사하지만, 방위축이 기울어져 있으며 "웨지"라고 불리는 하드웨어 부품을 사용하여 지구 자전축과 일치하도록 정렬되어 있다.[6]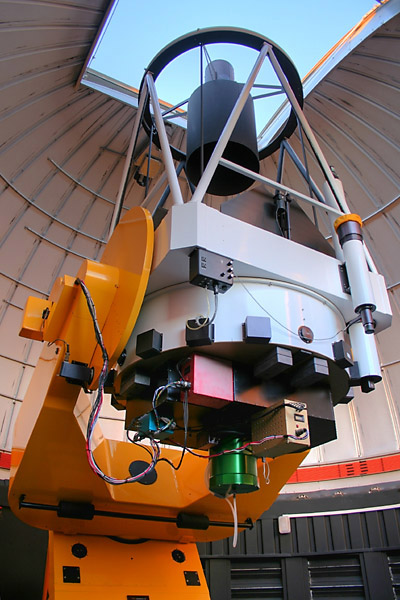
U자형 암 사이에 경통을 설치하고, U자형 암이 극 방향으로 회전하는 방식이다. 경통이 짧은 망원경에 적합하다. 최근 50cm급 공공 천문대의 대부분은 포크식 적도의이다. 또한 일반적인 포크식에서는 경통을 좌우 양쪽에서 지지하지만, 한쪽 암을 생략하고 1곳에서 지지하는 '외팔 포크식'도 존재하며, 경통이 가벼운 망원경에 사용되는 경우가 있다.
많은 중형 전문 망원경 또한 ''적도 포크''를 가지고 있으며, 일반적으로 직경 0.5-2.0미터 범위에 있다.
3. 3. 영국식 적도의 (요크식 적도의)
영국식 가대(English mount) 또는 요크식 가대(York mount)는 프레임 또는 "요크"를 가지고 있으며, 요크의 상단과 하단에 적경 축 베어링이 있고, 망원경은 요크의 중간 지점 내부에 부착되어 적위 축에서 회전할 수 있다.[7] 망원경은 일반적으로 포크 내부에 완전히 장착되지만, 마운트 윌슨 2.5m 반사경과 같은 예외도 있으며, 독일식 가대와 같은 균형추는 없다.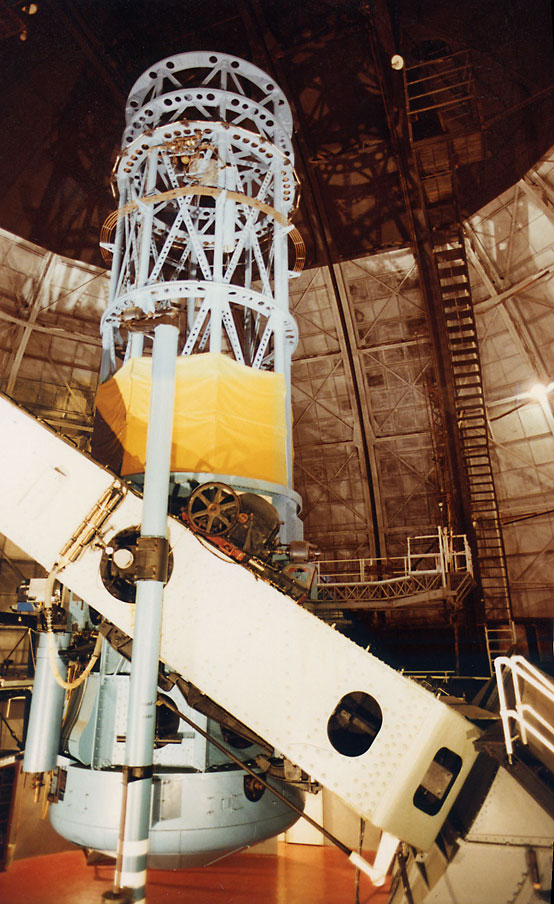
원래 English 포크 디자인은 망원경이 북쪽 또는 남쪽 천구의 극에 너무 가깝게 향할 수 없다는 단점이 있다.
3. 4. 교차축식 적도의 (영국식 교차축식 적도의)
교차축식 가대는 큰 (+) 기호와 같이 생겼다. 적경축은 양쪽 끝에서 지지되며, 적위축은 적경축의 중간 지점에 부착되어 망원경이 적위축의 한쪽 끝에 있고 균형추가 반대쪽에 있는 구조이다.[8]
3. 5. 말굽식 적도의
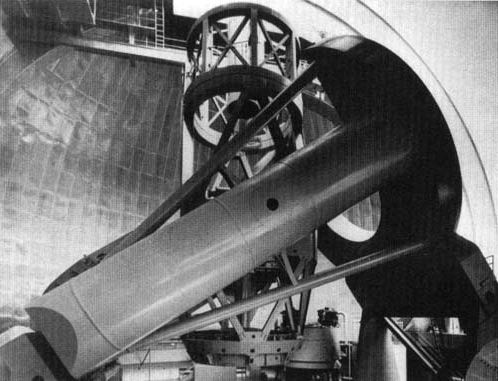
'''말굽 마운트'''는 잉글리시 마운트나 요크 마운트에서 북극성과 그 근처 별을 관측하기 어려운 단점을 보완하기 위해 극 베어링을 "말굽" 형태로 만든 것이다. 헤일 망원경이 대표적인 예시이다.[8] 말굽식이라고도 불리며, 더블 요크식의 단점을 해결하기 위해 고안되었다.[11] 팔로마 천문대의 200인치 망원경이 이 형식을 채택했다.
4. 극축 정렬
적도의는 관측 전 극축을 북반구에서는 천구의 북극에 맞춰 설치해야 한다.[10] 극축을 지구 자전축과 평행하게 설치하고, 별의 일주 운동과 같은 속도(23시간 56분 4초/주)로 회전시키면 별의 움직임을 상쇄하여 장시간 관측 및 사진 촬영이 용이하다.[10][11] 특히 천체 사진 촬영은 적도의 없이는 거의 불가능하다.[10] 극축에는 보통 1주 24시간 눈금이 새겨져 있으며, 시각 눈금과 적경 눈금이 있다. 북반구에서 망원경을 서쪽으로 돌릴 때 숫자가 증가하면 시각 눈금, 감소하면 적경 눈금이다. 극축은 웜 기어를 통해 미세하게 조정된다.[10]
4. 1. 극축 정렬 방법
관측 전에 극축을 북반구의 경우 천구의 북극을 향하도록 설치할 필요가 있다.[10]5. 현대 기술
적도 망원경 가대는 다양한 디자인으로 제공된다. 적도 가대는 고도 방위 가대와는 다르게, 하늘의 고정된 천체를 추적하기 위해 두 축 모두에서 가변 속도 운동이 필요한 고도 방위 가대보다 기계적으로 단순하다. 또한, 천체 사진 촬영의 경우, 초점면에서 이미지가 회전하는 고도 방위 가대와 달리, 회전하는 도립 프리즘이나 기타 시야 회전 방지 장치가 설치되지 않아도 표적의 움직임을 추적할 수 있다.
최근 새로운 관측소 설계에서 적도 가대는 대규모 전문 분야에서 수십 년 동안 선호되지 않았다. 대형 신규 기기는 고도-방위각(상하, 좌우) 구성으로 장착될 때 가장 안정적이기 때문이다. 전산화된 추적 및 시야 회전 방지는 전문적인 수준에서 구현하기 어렵지 않다. 그러나 아마추어 수준에서는 적도 가대가, 특히 천체 사진 촬영에 여전히 인기가 있다.
5. 1. 전동 추적
천문 망원경 가대에서 적도축(즉, ''적경'')은 수직 좌표축(''적위''로 알려짐)과 짝을 이룬다. 가대의 적도축에는 종종 전동 "''시계 구동''" 장치가 장착되어 있는데, 이는 하늘의 겉보기 일주 운동에 정확히 맞춰 23시간 56분마다 한 바퀴 회전한다.[3] 또한 눈금환을 장착하여 천구 좌표로 천체의 위치를 찾을 수 있다.지난 20년 동안 전동 추적은 점점 더 전산화된 천체 위치 탐색으로 보완되었다. 크게 두 가지 유형이 있다. 디지털 눈금환은 인코더에 연결된 천체 데이터베이스가 있는 소형 컴퓨터를 사용한다. 컴퓨터는 하늘에서 망원경의 위치를 모니터링한다. 사용자는 망원경을 밀어야 한다. Go-to 시스템은 (대부분의 경우) 서보 또는 스테퍼 모터로 구동되는 웜 및 링 기어 시스템을 사용하며, 사용자는 하늘에서 위치를 변경하기 위해 기기를 전혀 만질 필요가 없다. 이러한 시스템의 컴퓨터는 일반적으로 제어 "패들"로 휴대하거나 전자 카메라에서 이미지를 캡처하는 데에도 사용되는 인접한 랩톱 컴퓨터를 통해 제공된다. 최신 망원경 시스템의 전자 장치에는 종종 자동 가이드용 포트가 포함된다. 특수 기기는 별을 추적하고 하늘을 촬영하는 동안 망원경의 위치를 조정한다. 이렇게 하려면 자동 가이더가 망원경의 제어 시스템을 통해 명령을 내릴 수 있어야 한다. 이러한 명령은 망원경을 움직이는 웜 구동으로 인한 주기적 오류와 같이 추적 성능의 매우 작은 오류를 보상할 수 있다.
극축의 회전에는 미동 핸들을 수동으로 조작하거나[11], 추와 진자에 의한 운전 시계, 또는 모터 드라이브[10][11]를 사용한다. 두 축 모두 모터를 장착하고 컴퓨터로 적경 및 적위를 지정하여 목표 천체를 비교적 쉽게 도입할 수 있는 장치도 판매되고 있다.
5. 2. 자동 도입 (Go-to)
최근 20년 동안 전동 추적 방식은 전산화된 천체 위치 탐색 기능으로 보완되고 있다. 크게 두 가지 유형으로 나뉘는데, 디지털 눈금환은 인코더와 연결된 천체 데이터베이스를 갖춘 소형 컴퓨터를 사용한다. 컴퓨터는 하늘에서 망원경의 위치를 추적하며, 사용자가 직접 망원경을 조작해야 한다. 반면 Go-to 시스템은 서보 또는 스테퍼 모터로 구동되는 웜 및 링 기어 시스템을 사용하여, 사용자가 하늘에서 위치를 변경하기 위해 기기를 직접 만질 필요가 없다. 이러한 시스템의 컴퓨터는 일반적으로 제어 "패들"을 통해 휴대하거나, 전자 카메라에서 이미지를 캡처하는 데 사용되는 랩톱 컴퓨터를 통해 제어할 수 있다.[3]최신 망원경 시스템에는 자동 가이드용 포트가 포함된 경우가 많다. 특수 기기가 별을 추적하고 하늘을 촬영하는 동안 망원경의 위치를 조정한다. 자동 가이더는 망원경 제어 시스템을 통해 명령을 내려 망원경을 움직이는 웜 구동으로 인해 발생하는 주기적 오류와 같은 추적 성능의 미세한 오차를 보정할 수 있다.[3]
두 축에 모두 모터를 장착하고 컴퓨터를 통해 적경과 적위를 지정하여 목표 천체를 비교적 쉽게 찾을 수 있는 장치도 판매되고 있다.[10]
참조
[1]
웹사이트
LAS MONTURAS
https://web.archive.[...]
Observatorio J. A. Soldevilla
2008-09-20
[2]
웹사이트
Observatorio ARVAL - Polar Alignment for Meade LXD55/75 Autostar telescopes
http://www.oarval.or[...]
Observatorio ARVAL
[3]
서적
Turn left at Orion: a hundred night sky objects to see in a small telescope
https://books.google[...]
[4]
웹사이트
German and Fork Equatorial Mounts
https://web.archive.[...]
2002-2007 Mathis-Instruments
[5]
서적
Firefly Astronomy Dictionary
https://archive.org/[...]
Firefly Books Ltd. 2003
[6]
웹사이트
Telescope Mount
http://www.universet[...]
Universe Today
[7]
웹사이트
IMSS - Multimedia Catalogue - Glossary - Telescope mounts
http://webarchive.lo[...]
1995-2006 IMSS Piazza dei Giudici 1 50122 Florence ITALY
[8]
웹사이트
Telescope Mountings
http://www.quadibloc[...]
2001, 2004 John J. G. Savard
[9]
서적
Star Ware: The Amateur Astronomer's Guide to Choosing, Buying, and Using Telescopes and Accessories
https://books.google[...]
[10]
문서
天体望遠鏡のすべて'75年版
[11]
문서
天体望遠鏡ガイドブック
[12]
문서
世界大百科事典 第2版
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com