하디맨
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
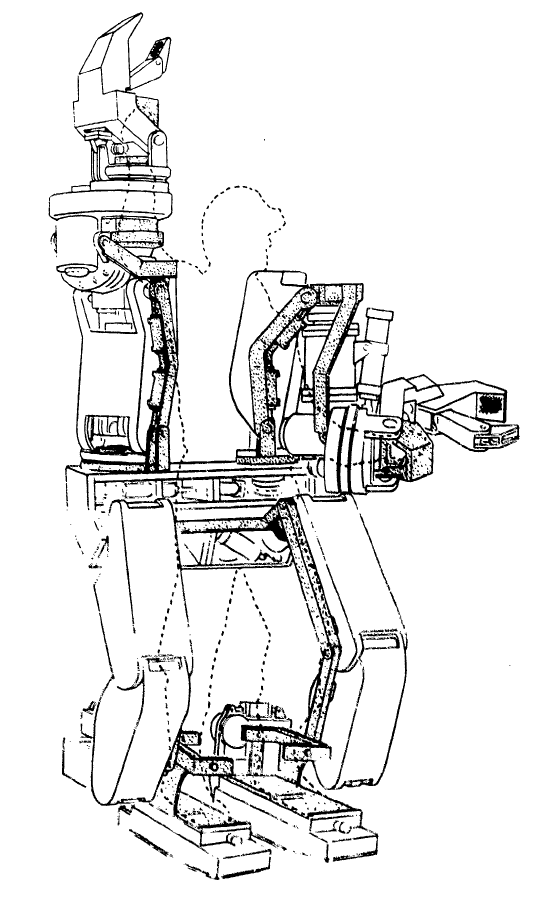
하디맨 프로젝트는 로봇 공학, 특히 외골격 기술 발전에 중요한 이정표를 세운 연구이다. 인간의 힘과 지구력을 증강시키는 기계 시스템을 구축하려는 시도는 외골격 로봇 개발에 영감을 주었다. 제어 시스템의 불안정성, 제한적인 동작 범위, 무거운 무게 등의 기술적 한계는 실용적인 외골격 로봇 개발의 과제를 제시했다.
더 읽어볼만한 페이지
- 미국의 로봇 - 일렉트로 (로봇)
일렉트로는 1939년 뉴욕 세계 박람회에 전시된 키 2.1m의 인간형 로봇으로, 음성 명령에 따라 움직이고 약 700단어를 말하며, 현재는 오하이오 맨스필드 기념 박물관에 원본 부품이 전시되어 있다.
| 하디맨 | |
|---|---|
| 하디맨 정보 | |
 | |
| 개발 | 제너럴 일렉트릭 |
| 개발 연도 | 1965년 |
2. 하디맨
wikitext
 |
| 예시 |
하디맨 프로젝트는 로봇 공학, 특히 외골격 기술 발전에 중요한 이정표를 세웠다. 인간의 힘과 지구력을 증강시키는 기계 시스템을 구축하려는 시도는 이후 다양한 분야에서 외골격 로봇 개발에 영감을 주었다.
그러나 하디맨은 몇 가지 기술적 한계점을 드러냈다. 제어 시스템의 불안정성, 제한적인 동작 범위, 무거운 무게 등은 실용적인 외골격 로봇 개발에 극복해야 할 과제를 제시했다. 이러한 한계는 이후 연구자들이 더욱 발전된 제어 기술, 경량화된 소재, 효율적인 동력 시스템을 개발하는 동기가 되었다.
2. 1. 개발 배경
wikitable| 예시 |
2. 2. 기술적 특징
wikitable| 예시 |
2. 3. 개발 과정
wikitable| 예시 |
2. 4. 프로젝트의 의의와 한계
하디맨 프로젝트는 로봇 공학, 특히 외골격 기술 발전에 중요한 이정표를 세웠다. 인간의 힘과 지구력을 증강시키는 기계 시스템을 구축하려는 시도는 이후 다양한 분야에서 외골격 로봇 개발에 영감을 주었다.그러나 하디맨은 몇 가지 기술적 한계점을 드러냈다. 제어 시스템의 불안정성, 제한적인 동작 범위, 무거운 무게 등은 실용적인 외골격 로봇 개발에 극복해야 할 과제를 제시했다. 이러한 한계는 이후 연구자들이 더욱 발전된 제어 기술, 경량화된 소재, 효율적인 동력 시스템을 개발하는 동기가 되었다.
참조
[1]
웹사이트
1965-71 - G.E. Hardiman I Exoskeleton
http://cyberneticzoo[...]
[2]
웹사이트
How GE's Early Innovations Provided a Glimpse of the Future
https://web.archive.[...]
2016-01-14
[3]
웹사이트
Handyman to Hardiman
http://cyberneticzoo[...]
[4]
웹사이트
Haridman I Arm Test
https://web.archive.[...]
1969-12-31
[5]
웹사이트
1965-71 - G.E. Hardiman I Exoskeleton
http://cyberneticzoo[...]
[6]
웹인용
How GE’s Early Innovations Provided a Glimpse of the Future
http://channel.natio[...]
2020-12-17
[7]
웹인용
Handyman to Hardiman
http://cyberneticzoo[...]
[8]
웹사이트
Haridman I Arm Test
http://www.dtic.mil/[...]
1969-12-31
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com