정지 전이 궤도
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
정지 천이 궤도(GTO)는 고타원 지구 궤도의 일종으로, 원지점이 정지 궤도 고도인 약 35,786 km에 이르는 궤도이다. GTO는 발사체의 성능 요구 조건을 완화하고 위성 자체의 추진 시스템을 활용하여 정지 궤도에 진입하는 데 사용된다. 일반적으로 발사체는 위성을 GTO에 투입하고, 위성에 탑재된 아포지 모터를 사용하여 궤도를 원형화하고 궤도 경사각을 변경하여 정지 궤도에 진입한다. 궤도 변환에는 호만 전이 방식이 사용되며, 전기 추진과 같은 추력이 낮은 엔진을 사용하는 경우 초정지 궤도를 거쳐 정지 궤도에 진입할 수 있다. GTO의 궤도 경사각은 발사장의 위도와 발사 방위각에 의해 결정되며, 적도에 가까운 발사장일수록 경사각 변경에 필요한 연료량을 줄일 수 있다.
더 읽어볼만한 페이지
- 지구 궤도 - 지구 저궤도
지구 저궤도는 지구 대기권과 밴 앨런대 사이에 위치하며 고도 80km에서 500km 사이의 궤도로, 위성 발사 비용이 적고 통신 지연 시간이 짧아 통신, 지구 관측, 우주 정거장 운영에 활용되지만, 우주 쓰레기 문제로 충돌 위험이 증가하고 있다. - 지구 궤도 - 스타링크
스타링크는 스페이스X가 개발 중인 저궤도 군집 위성 통신 네트워크 시스템으로, 광대역 인터넷 서비스 제공 및 화성 탐사 자금 조달을 목표로 하지만 빛 공해, 전파 간섭, 위성 충돌 위험 등의 과제도 안고 있다. - 천체동역학 - 호만 전이 궤도
호만 전이 궤도는 우주선을 낮은 원형 궤도에서 높은 원형 궤도로 이동시키는 데 사용되는 타원 궤도로, 두 번의 엔진 점화를 통해 궤도를 변경하며, 특정 조건 하에서 최소 에너지를 사용하는 궤도 전이 방법이다. - 천체동역학 - 목성 얼음 위성 탐사선
목성 얼음 위성 탐사선(Juice)은 유럽 우주국(ESA)의 목성 탐사선으로, 목성과 위성들의 대기, 표면, 내부 구조, 자기장을 탐사하며, 특히 가니메데의 해양층과 자기장 상호 작용을 상세히 조사하고, 유로파에서 생명체 관련 화학 물질과 얼음 지각 두께를 측정할 예정이다.
| 정지 전이 궤도 | |
|---|---|
| 개요 | |
| 유형 | 궤도 |
| 사용 목적 | 정지 궤도 또는 정지 천이 궤도로의 이동 |
| 궤도 특성 | |
| 원지점 고도 | 정지 궤도 고도 (약 35,786 km) |
| 근지점 고도 | 지구 저궤도 (LEO) 또는 중간 지구 궤도 (MEO) |
| 궤도 경사 | 발사 위치의 위도와 일치 (적도 발사의 경우 0도) |
| 사용 | |
| 일반적인 발사 방법 | 지구 저궤도 (LEO)로 발사 후, GTO로 이동 아리안 5와 같은 발사체는 GTO에 직접 위성을 배치 가능 |
| 사용 목적 | 정지 위성을 최종 목적지 궤도에 배치하기 위한 중간 단계 |
| 궤도 조정 | |
| 호만 천이 | GTO에서 정지 궤도로의 궤도 변경에 사용 |
| 궤도 경사 변경 | 위성이 정지 궤도에 진입하기 위해 필요 |
| 다른 궤도와의 관계 | |
| GTO와 GEO | GTO는 GEO로 가기 위한 중간 궤도 |
| 슈퍼싱크로너스 GTO | 표준 GTO보다 더 높은 원지점을 가지며, 궤도 경사 감소에 효율적 |
| 준동기식 GTO | 근지점이 GEO 고도에 더 가까운 궤도 |
| 장점 및 단점 | |
| 장점 | 발사 비용 절감 다양한 발사체 사용 가능 |
| 단점 | 추가적인 궤도 조정 필요 정지 궤도 진입까지 시간 소요 |
| 참고 사항 | |
| 궤도 경사 | 궤도 경사는 발사 위치와 최종 궤도에 따라 달라짐 |
| 델타-V | GTO에서 GEO로 이동하는 데 필요한 델타-V는 약 1.5 km/s |
2. 정지 천이 궤도 (GTO)
정지 천이 궤도(Geostationary Transfer Orbit|GTOeng)는 인공위성을 최종 목표인 정지 궤도(GEO)나 정지 동기 궤도(GSO)에 올리기 위해 거치는 중간 단계의 타원 궤도이다. 정지 궤도는 고도가 매우 높아 직접 도달하려면 많은 연료, 즉 높은 델타-v(속도 변화량)가 필요하여 비용이 많이 든다.[3] 따라서 발사 비용을 줄이고 효율성을 높이기 위해 GTO를 경유하는 방식을 주로 사용한다.
일반적으로 발사체는 위성을 GTO까지만 운반하고 분리된다. 이후 위성은 자체에 탑재된 추진 시스템을 이용하여 점진적으로 궤도를 수정하고 최종적으로 목표 정지 궤도에 진입하게 된다. 이 방식은 발사체의 부담을 줄이고, 위성이 최종 궤도까지 운반해야 하는 연료의 양을 최적화하며, 오베르트 효과 등을 활용하여 궤도 변경의 효율성을 높이는 장점이 있다. 또한, 임무를 마친 발사체 상단 로켓이 비교적 쉽게 궤도 이탈하여 우주 쓰레기 발생을 줄이는 데도 기여한다.
GTO는 원지점(지구에서 가장 먼 지점)이 목표 정지 궤도 고도에 맞춰지고, 근지점(지구에서 가장 가까운 지점)은 발사 효율과 발사체 폐기 등을 고려하여 대기권 상층부의 낮은 고도로 설정되는 것이 일반적이다. GTO의 구체적인 특성, 정지 궤도 진입 방법, 궤도 변환 기술 등에 대한 자세한 내용은 하위 섹션에서 다룬다.
2. 1. GTO의 기술적 특징
정지 전이 궤도(GTO)는 정지 궤도나 정지 동기 궤도로 위성을 보내는 과정에서 효율성을 높이기 위해 사용되는 중간 단계의 고타원 지구 궤도이다. 정지 궤도는 고도가 높아 직접 도달하려면 많은 델타-v(속도 변화량)가 필요하여 비용이 많이 들기 때문에, GTO를 거치는 것이 일반적이다.
GTO는 원지점(궤도상에서 지구로부터 가장 먼 지점) 고도가 정지 궤도의 고도인 해발 약 35786km(지구 중심에서는 약 42164km)에 이르도록 설계된다. 일반적인 GTO의 궤도 주기는 약 10.5시간이다.[3] 근지점(궤도상에서 지구로부터 가장 가까운 지점)은 대기권 마찰을 피할 수 있도록 지구 표면으로부터 수백 킬로미터 상공에 위치하는 것이 보통이다. 근지점 고도를 낮게 설정하면 발사체의 델타-V 요구량을 줄일 수 있고, 임무 완료 후 발사체 상단 로켓(부스터)이 대기권 재진입을 통해 빠르게 궤도 이탈하여 우주 쓰레기가 되는 것을 방지하는 데 도움이 된다.
위성을 GTO에 올리는 과정은 일반적으로 다음과 같다.
# 대기 궤도 발사: 먼저, 로켓으로 위성을 저고도의 지구 주회 원궤도(파킹 궤도)에 올린다.
# GTO 진입: 적절한 시점에 로켓 엔진(주로 발사 로켓의 최상단)을 점화하여 속도를 높여, 원지점 고도를 정지 궤도 높이까지 올린다. 이 타원 궤도가 GTO이다.
# 정지 궤도 진입: GTO의 원지점에 도달했을 때, 위성 자체에 탑재된 엔진(아포지 킥 모터)을 사용하여 추력을 가해 근지점 고도를 높여 궤도를 원형으로 만든다. 이 과정은 여러 번의 엔진 분사를 통해 이루어질 수 있다.
# 최종 위치 조정: 위성 내장 자세 제어용 엔진으로 궤도와 고도를 미세 조정하여 목표 정지 위치로 이동한다.
이러한 궤도 변경 방식 중 대표적인 것이 호만 전이 궤도이며, 두 원궤도 사이를 최소한의 에너지로 이동하는 방법으로 알려져 있다. 파킹 궤도에서 GTO로, GTO에서 정지 궤도로 이동하는 데 이 원리가 적용된다.
고출력 발사체로 위성을 GTO에 직접 투입한 후, 위성 자체의 저출력 고효율 추진기(예: 전기 추진)를 사용하여 장시간에 걸쳐 서서히 궤도를 원형화하며 최종 정지 궤도로 진입하는 방식도 사용된다. 이 과정은 '나선형 전개'라고도 불리며, 위성이 운반해야 할 연료 질량을 줄이고 오베르트 효과를 활용해 원지점에서의 궤도 원형화 연소 효율을 높이는 장점이 있다. 다만, 호만 전이 궤도 방식이 며칠 소요되는 데 비해, 저추력 엔진 방식은 최종 궤도 도달까지 수개월이 걸릴 수 있다.[4][5]
때로는 초정지 궤도(Super-synchronous transfer orbit)를 이용하기도 하는데, 이는 GTO의 원지점을 최종 목표인 정지 궤도보다 더 높게 설정하는 방식이다. 특히 전기 추진과 같이 추력이 낮은 엔진을 사용하거나, 고위도 발사장에서 발사하여 궤도 경사각 변경에 필요한 에너지를 절약하고자 할 때 사용된다. 이 경우, 위성의 저추력 엔진이 지속적으로 추력을 가하며 원지점을 낮추고 근지점을 높이는 동시에 궤도 경사각을 줄여 최종적으로 정지 궤도에 도달하게 된다.
GTO의 중요한 기술적 특징 중 하나는 궤도 경사각이다. 이는 위성의 궤도면과 지구의 적도면이 이루는 각도로, 발사장의 위도와 발사 방위각(발사 방향)에 따라 결정된다. 정지 궤도는 적도면 위에 위치하므로(경사각 0°), GTO에서 정지 궤도로 진입하려면 반드시 궤도 경사각을 0°로 변경해야 한다.
궤도 경사각 변경에는 상당한 델타-v가 필요하며, 이 값은 위성의 순간 속도에 비례한다. 따라서 속도가 가장 느린 원지점에서 경사각 변경을 수행하는 것이 연료 소모 측면에서 가장 효율적이다. 필요한 델타-v는 다음 공식으로 계산된다:[6]
:
여기서 는 경사각 변경 시점의 위성 속도, 는 변경해야 할 경사각의 크기이다.
예를 들어, 장반경이 24582km인 일반적인 GTO의 경우, 근지점 속도는 9.88 km/s이고 원지점 속도는 1.64 km/s이다. 따라서 원지점에서 경사각을 변경하는 것이 훨씬 적은 연료를 소모한다. 실제 임무에서는 효율성을 높이기 위해 경사각 변경 기동과 궤도를 원형으로 만드는 원지점 킥(apogee kick) 연소를 원지점에서 동시에 수행하는 경우가 많다. 두 기동을 결합했을 때 필요한 총 델타-v는 각 기동에 필요한 델타-v의 벡터 합으로 계산되며, 이는 항상 두 기동을 따로 수행할 때 필요한 델타-v의 합보다 작다. 결합된 델타-v는 다음 공식으로 계산할 수 있다:[6]
:
여기서 는 GTO 원지점에서의 속도, 는 정지 궤도(GEO)에서의 속도이다.
궤도 경사각은 발사장의 위도와 밀접한 관련이 있기 때문에, 적도에 가까운 발사장에서 위성을 발사할수록 초기 GTO의 경사각이 작아져 정지 궤도 진입에 필요한 델타-v를 줄일 수 있다. 예를 들어, 프랑스령 기아나의 쿠루 우주 센터(북위 약 5°)는 지리적 이점이 크다. 시 론치(Sea Launch)는 적도 해상 플랫폼에서 발사 서비스를 제공하여 경사각 변경 필요성을 최소화하기도 했다. 반면, 다네가시마 우주 센터나 바이코누르 우주 기지와 같이 고위도에 위치한 발사장에서 발사할 경우, 더 큰 경사각 변경이 필요하여 효율성이 떨어진다. 이러한 단점을 보완하기 위해 앞서 언급된 초정지 궤도 방식이 고위도 발사장에서 활용되기도 한다.
2. 2. GTO를 이용한 정지 궤도 진입
정지 궤도 및 정지 동기 궤도는 많은 통신 위성 및 지구 관측 위성에 매우 유용하지만, 높은 고도로 인해 궤도 진입에 필요한 델타-v와 비용이 많이 든다. 정지 전이 궤도(GTO)는 이러한 위성을 보다 효율적으로 정지 궤도에 올리기 위해 사용하는 중간 단계의 타원 궤도이다.일반적으로 위성 운영자는 먼저 상대적으로 고추력, 저효율의 발사체를 사용하여 위성을 GTO에 투입한다. GTO에 도달하면 발사체는 분리되고, 이후 위성 자체에 탑재된 저추력, 고효율의 추진 시스템(엔진)을 사용하여 오랜 시간에 걸쳐 서서히 궤도를 원형으로 만들면서 최종 목표인 정지 궤도(GEO)에 진입한다. 만약 위성이 전기 추진과 같은 매우 낮은 추력의 엔진을 사용한다면, 이 과정은 수개월이 걸릴 수도 있으며, 이를 나선형 전개(spiral-out)라고 한다.
GTO를 이용하는 방식은 여러 이점이 있다. 첫째, 위성 자체의 고효율 엔진으로 궤도 변경의 상당 부분을 수행하므로, 발사체는 위성을 최종 정지 궤도까지 직접 올릴 필요 없이 GTO까지만 운반하면 되어 발사체의 요구 성능이 낮아진다. 둘째, 위성이 최종 궤도에 도달하기 위해 스스로 추진해야 하는 질량을 최소화할 수 있다. 셋째, 오베르트 효과를 최대한 활용하여 가장 효율적인 시점(근지점)에서 속도를 높여 원지점을 올리고, 원지점에서 다시 속도를 높여 궤도를 원형화할 수 있다. 넷째, 임무를 마친 발사체 상단은 GTO의 낮은 근지점 때문에 대기 마찰을 통해 비교적 쉽게 궤도 이탈하여 우주 쓰레기가 될 가능성을 줄인다.
정지 궤도는 적도 상공 약 36000km 고도의 원 궤도이다. 위성을 이 궤도에 올리는 일반적인 절차는 다음과 같다.
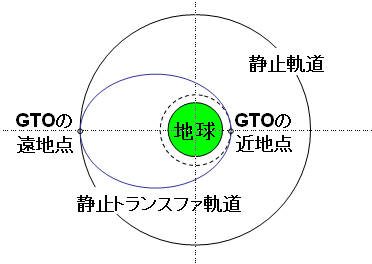
# '''대기 궤도(파킹 궤도) 발사''': 먼저 로켓을 이용해 위성을 지구 저궤도의 원형 대기 궤도(그림의 점선 원)에 올린다. 이 궤도를 파킹 궤도라고도 한다.
# '''GTO로 궤도 변경''': 파킹 궤도상의 특정 지점(보통 적도 통과 지점)에서 로켓 엔진을 점화하여 속도를 높인다. 이로 인해 위성은 타원 궤도인 GTO로 진입하게 되며, 이 궤도의 원지점(가장 먼 지점) 고도는 목표 정지 궤도의 고도와 같아진다. 원지점이 위성 추적 관제에 편리한 위치에 오도록 궤도 변경 시점을 정밀하게 선택하는데, 이것이 파킹 궤도를 거치는 이유 중 하나이다.
# '''정지 드리프트 궤도로 궤도 변경''': 위성이 GTO의 원지점에 도달했을 때, 위성에 탑재된 소형 로켓 엔진(주로 아포지 모터)을 분사하여 속도를 추가로 높인다. 이로 인해 근지점(가장 가까운 지점) 고도가 상승하여 궤도는 거의 원형에 가까워진다. 이 과정에서 궤도 경사각(적도면에 대한 기울기)도 함께 조정하는 경우가 많다.
# '''최종 정지 궤도 진입''': 위성에 내장된 자세 제어용 소형 엔진들을 사용하여 궤도 고도와 위치를 미세 조정하여 최종 목표 지점인 정지 궤도에 정확히 안착시킨다.
이러한 단계적 궤도 변경 방식은 일반적으로 호만 전이 방식이며, 궤도 변경에 필요한 에너지를 최소화하는 효율적인 방법으로 알려져 있다. 호만 전이는 두 원궤도 사이의 반지름 비율이 11.94배를 넘지 않을 때 가장 효율적이다. (만약 이 비율을 넘으면 이중 타원 전이 방식이 더 효율적일 수 있다.)
파킹 궤도에서 GTO로 변경할 때는 발사체의 최상단 로켓이 사용되는 경우가 많고, GTO에서 정지 궤도로 변경할 때는 위성 자체에 내장된 아포지 모터가 사용된다. 아포지 모터라는 이름은 궤도의 원지점(apogee)에서 분사하기 때문에 붙여졌다.
궤도 변경 과정에서는 고도뿐만 아니라 궤도면 경사각도 조정해야 한다. 대부분의 발사장은 적도에 위치하지 않기 때문에, 발사된 위성의 초기 파킹 궤도는 발사장의 위도만큼 기울어져 있다. 예를 들어, 일본의 다네가시마(북위 약 30.4도)나 카자흐스탄의 바이코누르(북위 약 45.9도)에서 발사하면 상당한 경사각을 가지게 된다. 하지만 정지 궤도는 적도면 위에 있어야 하므로(경사각 0도), GTO 원지점에서 아포지 모터를 분사할 때 이 경사각을 0도로 만드는 기동도 함께 수행해야 한다. 경사각 변경에는 많은 에너지가 소모되므로, 발사장의 위도가 낮을수록(적도에 가까울수록) 유리하다. 유럽 우주국(ESA)이 사용하는 프랑스령 기아나의 쿠루 우주 센터는 북위 약 5도에 위치하여 정지 위성 발사에 매우 유리한 조건을 갖추고 있다. 시 론치(Sea Launch)는 아예 적도 해상 플랫폼에서 발사 서비스를 제공하여 경사각 변경 에너지를 최소화한다.
한편, 슈퍼 싱크로너스 전이 궤도(Super-Synchronous Transfer Orbit, SSTO)라는 방식도 사용된다. 이는 원지점 고도가 목표 정지 궤도보다 훨씬 높은 GTO를 사용하는 방식이다. 이 궤도의 원지점에서 엔진을 분사하여 근지점을 높이는 동시에 원지점을 낮추어 정지 궤도로 진입한다. 특히 고위도 발사장에서 발사할 경우, 일반적인 GTO 방식보다 궤도 경사각 변경에 필요한 에너지를 절약할 수 있는 이점이 있다. 이 방식은 과거 소련/러시아의 발사 서비스에서 적극적으로 활용되었으며, 최근에는 다른 국가나 기관에서도 특정 임무 조건 하에서 효율적인 대안으로 연구되고 있다.
2. 3. 궤도 변환
정지 궤도나 정지 동기 궤도에 위성을 올리기 위해서는 궤도 경사각과 궤도 이심률을 모두 0으로 만들어야 한다. 정지 전이 궤도(GTO)는 이러한 최종 목표 궤도로 가기 위한 중간 단계의 타원 궤도로, 델타-v 소모와 비용을 줄이는 효율적인 방법으로 사용된다.[3] 일반적으로 위성 운영자는 먼저 고추력 발사체를 이용해 위성을 GTO에 올린 뒤 발사체를 분리하고, 이후 위성 자체에 탑재된 저추력 고효율 추진기(예: 전기 추진)를 사용하여 점진적으로 목표 궤도로 이동시킨다. 이 과정은 때때로 '''나선형 전개'''(spiral-out)라고 불린다. 이 방식은 최종 궤도까지 올려야 하는 위성의 질량을 최소화하고, 오베르트 효과를 활용해 효율적인 연소를 가능하게 하며, 사용된 발사체 단이 근지점 고도가 낮아 대기 제동을 통해 비교적 쉽게 궤도 이탈하여 우주 쓰레기가 될 가능성을 줄이는 장점이 있다.GTO는 고타원 지구 궤도의 일종으로, 원지점 고도는 정지 궤도 고도와 같은 해수면 위 35786km(지구 중심으로부터 42164km)이다. GTO의 공전 주기는 약 10.5시간이다.[3] 근지점 고도는 발사체의 성능 요구치를 낮추고 사용 완료된 발사체 단의 궤도 감쇠를 촉진하여 우주 쓰레기를 줄이기 위해 보통 지구 표면에서 수백 킬로미터 상공으로 설정된다.
최종 정지 궤도 진입을 위해서는 궤도 경사각과 이심률을 0으로 만들어야 한다. 이 조정 작업은 일반적으로 위성의 속도가 가장 느린 원지점에서 동시에 수행된다. 왜냐하면 궤도면 변경(경사각 변경)에 필요한 는 해당 지점에서의 속도에 비례하므로, 속도가 느릴수록 연료 소모를 최소화할 수 있기 때문이다.[6] 예를 들어, 장반경이 24,582 km인 전형적인 GTO의 경우, 근지점 속도는 9.88 km/s인 반면 원지점 속도는 1.64 km/s에 불과하여 원지점에서의 기동이 훨씬 효율적이다.
궤도 경사각 변경에 필요한 는 다음 식으로 계산된다:[6]
:
여기서 는 기동 시점의 속도, 는 변경해야 할 총 경사각 변화량이다.
실제 임무에서는 연료 효율을 높이기 위해 경사각 변경과 궤도 원형화(원지점 킥)를 위한 엔진 분사를 하나의 기동으로 결합하는 경우가 많다. 두 기동을 합쳤을 때 필요한 총 는 각 기동을 따로 수행할 때 필요한 의 단순 합보다 작다(벡터 합으로 계산되기 때문). 결합된 기동에 필요한 는 다음 공식으로 계산할 수 있다:[6]
:
여기서 는 GTO 원지점에서의 속도 크기이고 는 목표 정지 궤도(GEO)에서의 속도이다.
가장 일반적인 궤도 변환 방식은 호만 전이 궤도를 이용하는 것이다. 이 방식은 특정 조건 하에서 에너지를 최소로 소모하며, 일반적으로 다음과 같은 단계로 이루어진다.
# '''대기 궤도(Parking Orbit) 진입''': 발사체는 먼저 위성을 지구 저궤도의 원형 또는 타원형 대기 궤도(주차 궤도)에 올려놓는다.
# '''GTO 진입''': 대기 궤도상의 적절한 지점(보통 근지점)에서 발사체 상단 엔진을 점화하여 속도를 높여, 원지점 고도를 정지 궤도 높이까지 올리는 타원 궤도, 즉 GTO로 진입한다.
# '''정지 궤도 진입''': GTO의 원지점에 도달했을 때 위성에 내장된 아포지 킥 모터(Apogee Kick Motor, AKM)를 사용하여 속도를 높여 근지점 고도를 올리고 궤도를 원형화한다. 이 과정에서 필요한 경우 궤도 경사각 조정도 함께 수행한다.
# '''최종 위치 조정''': 위성의 자체 추진 시스템(자세 제어용 엔진 등)을 이용해 목표로 하는 경도상의 정지 위치로 미세하게 궤도를 조정한다.
호만 전이는 출발 궤도와 도착 궤도가 동일 평면상의 원궤도이고 궤도 반지름의 비가 약 11.94 이하일 경우 가장 효율적인 방법으로 알려져 있다. (이 비율을 넘어서면 이중 타원 전이가 더 효율적일 수 있다.)
궤도 변환 과정에서는 궤도 고도뿐 아니라 궤도면(경사각)도 조정해야 한다. 발사 초기 단계의 대기 궤도 경사각은 보통 발사장의 위도에 가깝게 설정되는데, 최종 목표인 정지 궤도는 적도 상공에 위치하므로 경사각을 0°로 만들어야 한다. 따라서 발사장의 위도가 낮을수록(적도에 가까울수록) 궤도면 변경에 필요한 에너지(델타-V)가 적게 들어 유리하다. 유럽 우주국(ESA)이 주로 사용하는 프랑스령 기아나의 기아나 우주 센터(북위 약 5°)나, 적도 해상 플랫폼에서 발사하는 시 론치(Sea Launch) 서비스가 이러한 지리적 이점을 가진다. 반면, 다네가시마 우주 센터(일본, 북위 약 30°)나 바이코누르 우주 기지(카자흐스탄, 북위 약 46°)와 같이 상대적으로 고위도에 위치한 발사장에서 발사할 경우 경사각 변경에 더 많은 연료가 소모된다.
전기 추진과 같이 추력이 매우 낮은 엔진을 사용하여 GTO에서 정지 궤도로 천이하는 경우, 최종 궤도에 도달하기까지 수개월이 걸릴 수 있다.[4][5] 이러한 저추력 장기 천이 방식에서는 원지점이 목표 정지 궤도보다 더 높은 초정지 전이 궤도(Super-synchronous transfer orbit)를 중간 단계로 사용하기도 한다. 저추력 엔진은 GTO나 초정지 전이 궤도를 따라 돌면서 장시간에 걸쳐 지속적으로 추력을 가하며, 추력의 방향과 크기를 정밀하게 제어하여 점진적으로 경사각을 줄이고 근지점을 높이며 원지점을 낮추는 방식으로 목표 정지 궤도에 접근한다. 초정지 전이 궤도를 이용하는 방식은 특히 고위도 발사장에서 발사할 때 궤도 경사각 변경에 필요한 에너지를 절약하는 데 유리할 수 있으며, 구 소련 및 러시아의 발사 서비스에서 활용되었고 최근 다른 국가에서도 연구되고 있다.
3. 발사 위치와 고려사항
정지 궤도 위성을 발사할 때는 발사장의 위치가 매우 중요하다. 정지 궤도는 적도 상공에 위치하므로, 발사장의 위도가 낮을수록(적도에 가까울수록) 목표 궤도인 정지 궤도에 도달하기 위해 필요한 궤도 경사각 변경량이 줄어든다. 이는 곧 위성의 델타-v(속도 변화량) 소모량을 줄여 연료를 절약하고 효율적인 발사를 가능하게 한다.
궤도 경사각을 0도로 줄이는 데 필요한 델타-v는 상당하며, 이는 곧 연료 소모량과 직결되므로 적도에 가까운 발사 기지가 높은 위도에 위치한 발사 기지보다 상당한 이점을 가진다. 주요 우주 발사장의 위치는 다음과 같다.
| 발사장 | 운영 주체/국가 | 위치 (위도) |
|---|---|---|
| 기아나 우주 센터 | 유럽 우주국 (프랑스령 기아나) | 북위 5° |
| 사티쉬 다완 우주 센터 | 인도 | 북위 13.7° |
| 원창 우주 발사 기지 | 중국 | 북위 19.5° |
| 케네디 우주 센터 | 미국 | 북위 28.5° |
| 바이코누르 우주 기지 | 러시아 (카자흐스탄) | 북위 46° |
유럽 우주국이 사용하는 프랑스령 기아나의 기아나 우주 센터는 북위 5°에 위치하여 정지 궤도 위성 발사에 매우 유리한 조건을 갖추고 있다. 과거 운영되었던 해상 발사(Sea Launch)는 태평양 적도상의 해상 플랫폼에서 직접 발사하여 궤도 경사각 변경이 거의 필요 없어 가장 효율적인 방법이었으나, 현재는 운영이 중단된 상태이다.
반면, 바이코누르 우주 기지처럼 고위도에 위치한 발사장에서 발사할 경우, 궤도 경사각을 0°로 변경하는 데 더 많은 연료가 필요하다. 이러한 불리함을 극복하기 위해 원지점 고도가 정지 궤도보다 높은 타원 궤도인 슈퍼 싱크로너스 전이 궤도 방식이 사용되기도 한다. 이는 궤도 경사각 변경에 필요한 에너지를 절약할 수 있는 방법으로, 특히 고위도 발사장을 운영하는 러시아 등에서 적극적으로 활용하는 방식이다.[9][10] 예를 들어 프로톤-M 로켓은 바이코누르에서 발사 시 3개의 중간 궤도를 거쳐 5번의 상단 로켓 점화를 통해 위성을 정지 궤도에 배치한다.[9]
대부분의 발사체는 위성을 정지 전이 궤도(GTO)까지만 운반하고 임무를 종료하며, 이후 위성 운영자가 위성 자체에 탑재된 아포지 킥 모터 등을 이용하여 최종적으로 정지 궤도(GEO)로 진입시킨다.
참조
[1]
서적
Space Mission Design and Analysis
Microcosm, Inc. and Kluwer Academic Publishers
1991
[2]
서적
Fundamentals of Astrodynamics and Applications
Microcosm Press
[3]
서적
Satellite Communications for the Nonspecialist
https://books.google[...]
SPIE Press
[4]
서적
Optimal Transfer Orbit Trajectory using Electric Propulsion
https://patents.goog[...]
USPTO
1997
[5]
서적
Method and a system for putting a space vehicle into orbit, using thrusters of high specific impulse
https://patents.goog[...]
USPTO
1997
[6]
서적
Orbital Mechanics for Engineering Students
Elsevier
2010
[7]
웹사이트
Archived copy
http://www.ulalaunch[...]
United Launch Alliance
2013-10-14
[8]
웹사이트
Archived copy
http://www.arianespa[...]
ArianeSpace
2016-03-08
[9]
간행물
Proton Mission Planner's Guide
http://www.ilslaunch[...]
International Launch Services
2009-11
[10]
간행물
Proton Mission Planner's Guide
http://www.ilslaunch[...]
International Launch Services
2009-11
[11]
웹사이트
軌道の種類
https://web.archive.[...]
2016-01-30
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com