화성 정찰위성
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
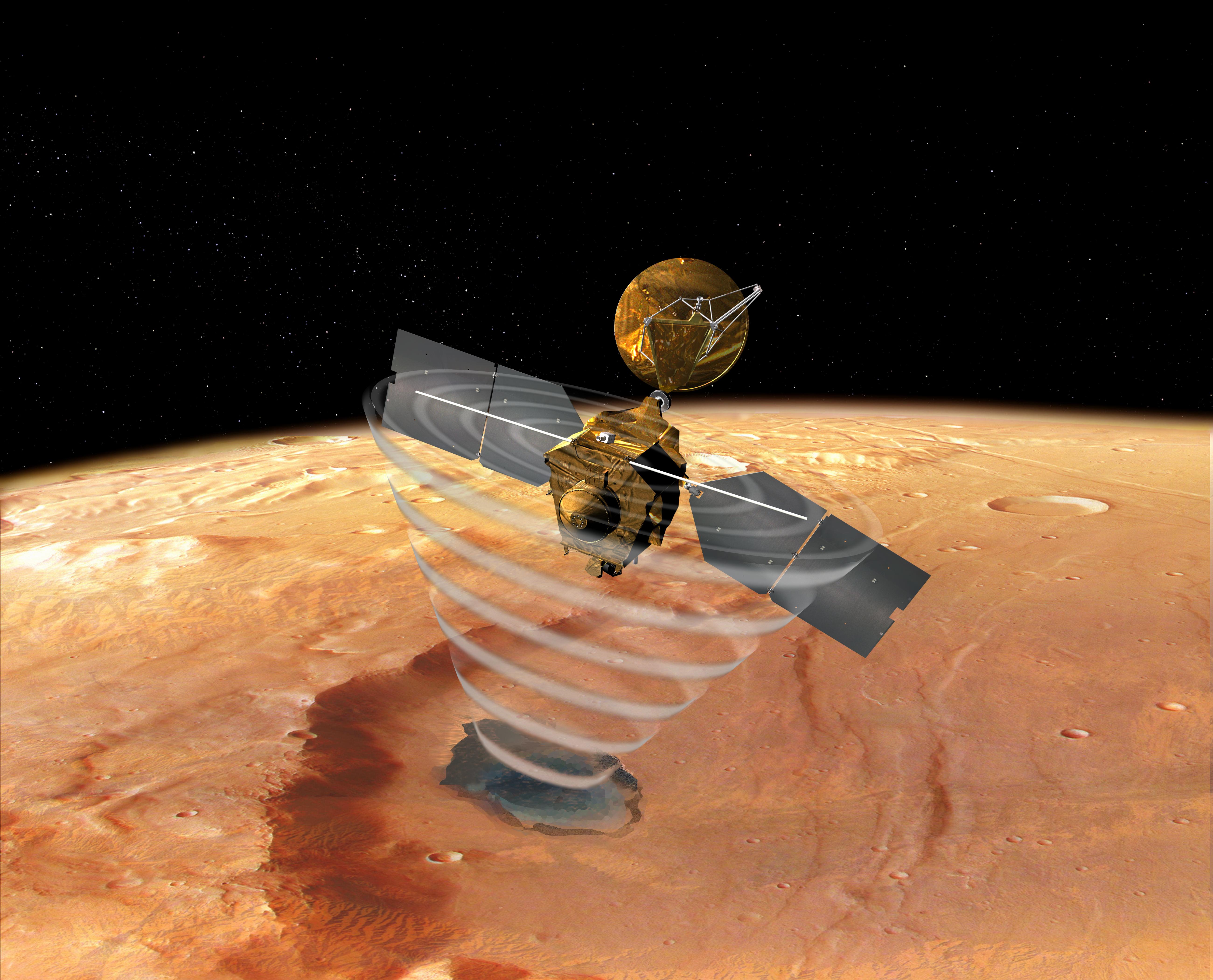
화성 정찰위성(Mars Reconnaissance Orbiter, MRO)은 2006년부터 화성 궤도에서 운용 중인 NASA의 탐사선이다. 1999년 화성 탐사 임무 실패 이후, "물을 따라가라"는 주제로 재계획된 화성 탐사 프로그램의 일환으로 발사되었다. MRO는 고해상도 카메라, 분광기, 레이더 등 다양한 과학 장비를 탑재하여 화성의 지형, 지질, 광물 및 빙하를 분석하며, 착륙선 및 탐사 로버의 데이터 중계, 착륙 지점 선정 등 임무 지원 역할도 수행한다. 주요 과학적 성과로는 물 얼음 발견, 염화물 퇴적물 및 수성 광물 확인, 반복 경사선(RSL) 관측 등이 있으며, 2024년 현재에도 큐리오시티와 퍼서비어런스 탐사차의 데이터를 지구로 송수신하고 있다. MRO의 개발 및 임무 운영에는 총 7억 1660만 달러가 소요되었다.
1999년 화성 기후 궤도선(Mars Climate Orbiter)과 화성 극지 착륙선(Mars Polar Lander) 임무 실패 후, 미항공우주국(NASA)은 화성 탐사 프로그램(Mars Exploration Program)을 재계획하고 "물을 따라가라(follow the water)"라는 새로운 주제를 도입했다. 2000년 10월, NASA는 2005년 발사될 화성 정찰 궤도선(MRO)을 포함하는 개편된 화성 계획을 발표했다.
화성정찰위성(MRO)은 과학적 목표와 임무 지원 목표를 모두 가지고 있다. 주요 과학 임무는 초기 2006년 11월부터 2008년 11월까지, 임무 지원 단계는 2006년 11월부터 2010년 11월까지로 계획되었으나, 두 임무 모두 연장되었다.[3]
2005년 8월 12일, MRO는 케이프커내버럴 우주군 기지에서 아틀라스 V 로켓에 실려 발사되었다. 화성 도착까지 7개월 반 동안 행성 간 궤도를 비행했고, 이 기간 동안 많은 관측 장치가 테스트 및 조정되었다. 2006년 3월 10일, 화성에 접근하여 남반구 고도 370km~400km에 도달했을 때 6개의 주 엔진이 27분간 분사되었다.[9] 이때 헬륨 가압 탱크가 예상보다 저온이 되어 연료 압력이 감소했기 때문에 추력이 2% 감소했지만, 자동적으로 분사가 33초간 연장됨으로써 보완되었다. 이로써 탐사선 속도는 2.9km/s에서 1.9km/s로 감속되어 근지점 고도 426km, 원지점 고도 44500km, 궤도 주기 35.5시간의 긴 타원형 극궤도에 진입했다.[10]
MRO에는 3대의 카메라, 2대의 분광계, 1대의 레이더와 함께 3대의 공학 장비 및 2개의 "과학 시설 실험"이 포함되어 있다. 이 장비들은 화성의 지형, 광물, 기후 등을 상세하게 관측하고, 미래 탐사를 위한 기술을 시험하는 데 사용된다.
2. 발사 전 준비
2001년 10월 3일, NASA는 록히드 마틴(Lockheed Martin)을 궤도선 제작 주계약자로 선정했다. 2001년 말까지 모든 임무 장비가 선정되었고, 2005년 5월 1일 발사 준비를 위해 존 F. 케네디 우주센터(John F. Kennedy Space Center)로 이송되었다.
3. 임무 목표
과학적 목표는 다음과 같다.[4]
임무 지원 목표는 다음과 같다.[4]
화성정찰위성은 피닉스 착륙선(2008년), 화성과학연구소/큐리오시티 탐사차(2012년), 인사이트 착륙선(2018년), 화성 2020/퍼서비어런스 탐사차(2021년)의 안전한 착륙 지점 선정에 중요한 역할을 했다.[5][6][7]
4. 발사 및 궤도 진입
2006년 3월 30일부터 MRO는 에어로브레이크를 시작했다.[12] 이는 화성 대기 저항으로 속도를 낮춰 연료를 절반으로 줄이면서 궤도를 원형에 가깝게 하고 주기를 짧게 하는 방법이다. 탐사선이 과열되지 않으면서도 감속에 충분한 대기 영향을 받도록 근지점을 낮추고, 7일 동안 5회의 스러스터 분사를 실시했다. 화성 대기압은 계절에 따라 변동하므로, 이 고도도 변동에 의존한다. 1997년 마스 글로벌 서베이어의 에어로브레이크 때 태양 전지판 왜곡으로 계획이 지연되었지만, MRO는 큰 문제없이 스러스터를 사용해 445회 공전 동안(약 5개월) 근지점 고도를 유지하고 원지점 고도를 450km까지 낮췄다. 이후 8월 30일, 대기 영향권에서 벗어나도록 근지점을 높이는 스러스터 분사를 실시했다.[89]
2006년 9월, 추가적인 스러스터 분사 2회를 통해 최종적으로 화성 표면에서 약 250km~316km 고도의 거의 원형 궤도에 도달했다. 이후 화성이 태양 바로 뒤를 지나는 합(solar conjunction)으로 인해 10월 7일부터 11월 6일까지 통신이 불가능해져 관측 장비가 일시 중단되었다. 이 기간이 끝난 후 "주요 과학 단계"(primary science phase)가 시작되었고,[13] 11월 17일에는 MRO가 화성의 로버 "스피릿"과 지구 사이 통신을 성공적으로 수행했다고 발표했다.
5. 주요 탑재 장비
장비명 설명 제작 HiRISE 고해상도 카메라 (0.3m 해상도) 볼 에어로스페이스 CTX 흑백 광역 카메라 (6m 해상도) 말린 우주과학 시스템(Malin Space Science Systems) MARCI 광시야 저해상도 컬러 카메라 (1km~10km 해상도) 말린 스페이스 사이언스 시스템즈(Malin Space Science Systems, MSSS) CRISM 가시광선 및 근적외선 분광계 존스 홉킨스 대학교 응용물리연구소 MCS 방사계 제트 추진 연구소(JPL) SHARAD 천부 레이더 이탈리아 우주국 일렉트라(무선) UHF 통신 패키지 제트 추진 연구소(JPL) 광학 항법 카메라 MRO의 궤도 정밀 측정 제트 추진 연구소(JPL) Ka 대역 원격 통신 실험 패키지 지구와 통신하는 데 에너지 소모가 적은 방법 시연 제트 추진 연구소(JPL) 대기 구조 조사 패키지 가속도계를 사용하여 에어로브레이킹 중 화성의 대기 밀도 추론 제트 추진 연구소(JPL) 중력장 조사 패키지 우주선 속도의 변화를 통해 화성 중력장의 변화 측정 제트 추진 연구소(JPL)
5. 1. HiRISE (고해상도 이미징 과학 실험)
'''HiRISE'''(High Resolution Imaging Science Experiment)는 화성 정찰위성에 탑재된 고해상도 카메라이다.[83] 이 카메라는 0.5m 반사 망원경을 사용하며, 이는 심우주 탐사에 사용된 것 중 가장 큰 망원경이다.[37] HiRISE는 300km 고도에서 0.3m 크기의 물체를 식별할 수 있는 해상도를 가지고 있는데, 이는 지구의 일반적인 상용 위성영상보다 더 세밀한 수준이다.
HiRISE는 세 가지 색상 대역으로 이미지를 촬영한다.
적색 이미지는 가로 20,264픽셀(6km 너비)이며, 청-녹색 및 근적외선 이미지는 가로 4,048픽셀(1.2km 너비)이다. HiRISE의 탑재 컴퓨터는 궤도선의 지상 속도에 맞춰 이미지 라인을 읽어 들이며, 이미지 길이는 이론적으로 무제한이다. 그러나 실제로는 컴퓨터의 28기가비트(Gb) 메모리 용량에 의해 제한을 받는다.
일반적으로 B-G 및 NIR 이미지는 최대 20,000 × 40,000픽셀(800메가픽셀), 적색 이미지는 4,000 × 40,000픽셀(160메가픽셀) 크기이다. 각 16.4Gb 이미지는 전송 전에 5Gb로 압축되어 HiRISE 웹사이트에서 JPEG 2000 형식으로 공개된다.
HiRISE는 잠재적 착륙 지점의 지형을 파악하기 위해 입체 사진 쌍을 생성할 수 있으며, 이를 통해 고도를 0.25m 정확도로 계산할 수 있다.
HiRISE는 볼 에어로스페이스에서 제작되었으며,[38] 데이터 조사는 애리조나 대학교의 월면 행성 연구소가 담당한다.
5. 2. CTX (문맥 카메라)
'''상황 카메라(CTX)'''는 최대 약 6m 픽셀 해상도의 흑백 이미지(500~800nm)를 제공한다. CTX는 HiRISE와 CRISM의 표적 관측을 위한 상황 지도를 제공하고, 화성의 광범위한 지역을 모자이크하며, 시간 경과에 따른 여러 위치의 변화를 모니터링하고, 주요 지역과 잠재적인 미래 착륙 지점의 입체(3D) 영상을 획득하는 데 사용된다. CTX의 광학계는 350mm 초점 거리의 막수토프-카세그레인 망원경과 5,064픽셀 너비의 선형 배열 CCD로 구성된다. 이 장비는 30km 너비의 사진을 찍으며, 주 컴퓨터에 로드하기 전에 160km 길이의 이미지를 저장할 수 있는 내부 메모리를 가지고 있다. 이 카메라는 말린 우주과학 시스템(Malin Space Science Systems)에서 제작 및 운영한다. CTX는 2017년 3월까지 화성의 99% 이상을 지도화했으며, 2023년 화성의 대화형 지도를 만드는 데 기여했다.[39][40]
5. 3. MARCI (화성 색상 이미저)
'''화성색상영상장치(MARCI)'''는 5개의 가시광선 영역과 2개의 자외선 영역에서 화성 표면을 관측하는 광시야, 저해상도 카메라이다. MARCI는 매일 약 84장의 이미지를 수집하여 픽셀 해상도가 1km~10km인 전 지구 지도를 생성한다. 이 지도는 화성의 주간 날씨 보고서를 제공하고, 계절 및 연간 변화를 나타내는 데 도움이 되며, 대기 중 수증기와 오존의 존재를 매핑한다. 이 카메라는 말린 스페이스 사이언스 시스템즈(Malin Space Science Systems)에서 제작 및 운영한다. 180도 어안렌즈를 가지고 있으며, 7개의 색상 필터가 단일 CCD 센서에 직접 접합되어 있다.[41] 같은 MARCI 카메라가 1998년에 발사된 화성 기후 궤도선에도 탑재되었다.[42]
MARCI는 5개의 가시광선, 2개의 자외선 파장대에서 화성 표면의 넓은 영역을 촬영한다. 화성 정찰위성이 하루에 12~13바퀴 화성을 공전하는 동안 수집한 영상을 합성하여 1~10km 해상도의 전 지구 지도를 생성한다. 이 지도를 통해 매일의 화성 날씨와 대기 상태(물, 얼음, 이산화탄소의 구름, 모래폭풍 등)를 알 수 있으며, 계절 변화와 연간 변동을 나타내는 데 도움이 된다. 또한, 자외선 관측을 통해 대기 중 수증기와 오존의 분포를 알 수 있다. CTX와 함께 말린 스페이스 사이언스 시스템즈(Malin Space Science Systems, MSSS)사가 제작 및 운영을 담당한다.
5. 4. CRISM (화성 컴팩트 정찰 영상 분광계)
'''화성 컴팩트 정찰 영상 분광계(CRISM)'''는 화성 표면의 광물학 상세 지도를 제작하는 데 사용되는 가시광선 및 근적외선 분광계이다. 362~3920 nm 파장 범위에서 작동하며, 544개 채널(각 채널 폭 6.55 nm)로 스펙트럼을 측정하고, 고도 300km에서 18m 해상도를 가진다.[43] CRISM은 화성 표면에서 과거 또는 현재 물의 존재를 나타내는 광물과 화학 물질(산화철, 규산염 광물, 탄산염 등)을 식별하는 데 사용되었으며, 이들은 가시광선-적외선 에너지에서 특징적인 패턴을 보인다.[44] CRISM 장비는 2023년 4월 3일에 가동이 중단되었다.[45]
5. 5. MCS (화성 기후 사운더)
'''화성 기후 사운더(MCS)'''는 대기의 수직 변화를 정량화하기 위해 대기의 수직 및 수평 방향을 모두 관측하는 방사계이다. 0.3~3.0 μm의 가시광선/근적외선 채널 1개와 12~50 μm의 원적외선 채널 8개를 가지고 있다. MCS는 화성 지평선(MRO에서 관측한 기준)에서 대기를 5km 간격으로 수직으로 나누어 각 부분에서 측정하여 대기를 관측한다. 이러한 측정값은 일일 전 지구 기상도로 종합되어 화성 기후의 기본 변수인 온도, 압력, 습도 및 먼지 밀도를 보여준다. MCS의 무게는 약 9kg이며 2006년 11월부터 작동을 시작했다.[46][47] 작동 시작 이후, 중간권 구름 지도를 만드는 데 도움이 되었고,[48] 먼지 폭풍을 연구하고 분류했으며,[49] 화성의 이산화탄소 눈에 대한 직접적인 증거를 제공했다.[50]
미 항공우주국(NASA)의 제트 추진 연구소(JPL)(Jet Propulsion Laboratory)에서 제공한 이 장비는 1992년 ''화성 관측자(Mars Observer)''와 1998년 ''화성 기후 궤도선(Mars Climate Orbiter)'' 임무를 위해 JPL에서 처음 개발된 더 무겁고 큰 장비의 업데이트 버전이다.[51] 두 임무 모두 실패했다.[52]
5. 6. SHARAD (천부 레이더)
'''SHARAD(Shallow Radar, 천부 레이더)'''는 화성 정찰 위성(MRO)에 탑재되어 화성 극지방 극관의 내부 구조를 조사하고, 지표면 아래 레골리스, 암석, 얼음 층에 대한 전 지구적 정보를 수집하기 위해 설계되었다. 15~25 MHz의 고주파 무선파를 방출하여 최대 3km 깊이까지 최소 7m 두께의 층을 구분할 수 있으며, 수평 해상도는 0.3km에서 3km이다. 해상도는 낮지만 더 깊은 곳까지 투과하는 마스 익스프레스의 MARSIS 장비를 보완하도록 설계되었으며, 이탈리아 우주국에서 제작했다.[53]
SHARAD는 지하 최대 1km까지의 모래, 암석, 얼음의 상태를 깊이 방향 10~20m의 정확도로 조사하며, 특히 액체 상태의 물이 존재하는지 여부를 조사한다. [88]
5. 7. 공학 장비 및 실험
일렉트라 통신 패키지는 UHF 소프트웨어 정의 라디오로서, 다른 우주선이 화성에 접근하고, 착륙하고, 작동할 때 통신하도록 설계되어 1 kbit/s~2 Mbit/s의 프로토콜 제어 우주선 간 데이터 링크를 제공한다.[54] 일렉트라는 도플러 정보를 통해 화성 착륙선과 로버의 지표면 위치를 정확하게 결정할 수 있도록 돕는다.[55][56] 일렉트라 무선은 화성 탐사 로버(MER) 우주선, 피닉스 착륙선 및 큐리오시티 로버와의 정보 중계에 사용되었다.[57]
Ka 대역 원격 통신 실험 패키지를 사용하여 MRO는 지구와 통신하는 데 에너지 소모가 적은 방법을 시연했다.[59]
광학 항법 카메라는 배경 별에 대한 화성의 위성인 포보스와 데이모스의 이미지를 촬영하여 MRO의 궤도를 정확하게 결정하며, 2006년 2월과 3월에 성공적으로 테스트되었다.
중력장 조사 패키지는 우주선 속도의 변화를 통해 화성 중력장의 변화를 측정한다. 이 데이터는 화성의 지하 지질, 대기 밀도, 표면에 퇴적된 이산화탄소의 위치의 계절적 변화를 추적하는 데 사용될 수 있다.
대기 구조 조사는 가속도계를 사용하여 에어로브레이킹 중 화성의 대기 밀도를 추론했다. 이러한 측정은 계절풍 변화, 먼지 폭풍의 영향 및 대기 구조에 대한 더 나은 이해를 제공하는 데 도움이 되었다.[60]
6. 주요 과학적 성과
MRO는 고해상도 카메라(HiRISE), 분광기(CRISM), 레이더(SHARAD) 등 여러 과학 장비를 탑재하여 화성의 지형, 지층, 광물 및 빙하를 분석했다. 그 결과, 화성 표면에서 다양한 과학적 발견을 이루었다.
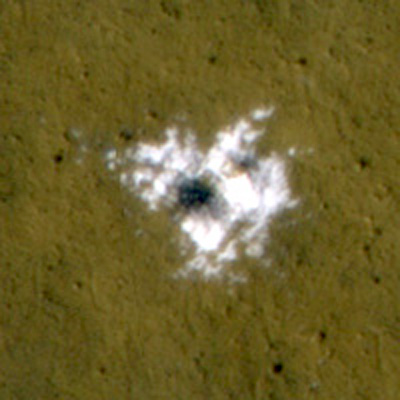
- 얼음 발견: 2009년 Science 저널에 따르면, MRO는 화성의 일부 충돌구에서 비교적 순수한 물 얼음을 발견했다. 이 얼음은 세브레니아 사각형 3곳(, , )과 디아크리아 사각형 2곳(, )에서 발견되었다. SHARAD 레이더는 엽상 파편 앞치마(LDA) 지형에 다량의 물 얼음이 존재함을 확인했는데, 이는 얇은 파편층으로 덮인 빙하라는 증거이다.
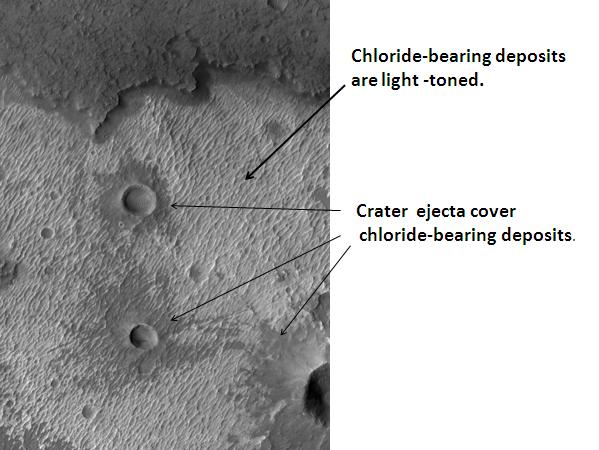
- 염화물 퇴적물 및 수성 광물: MRO는 광범위한 염화물 광물 퇴적물을 발견했는데, 이는 광물이 풍부한 물의 증발로 형성된 것으로 추정된다. 이는 화성 표면에 호수가 산재했을 가능성을 시사하며, 염화물 광물이 있는 곳에는 한때 다양한 생명체가 존재했을 수 있고, 고대 생명체의 흔적을 보존했을 가능성도 있다.
- 반복 경사선 (Recurring Slope Lineae, RSL): 2011년, NASA는 MRO가 경사면의 어두운 줄무늬(RSL)를 감지했으며, 이는 흐르는 염수로 인한 것으로 보인다고 발표했다. 2015년, NASA는 이 발견을 공식적으로 확인했으나,[77][78] 2017년 추가 연구에 따르면 이 줄무늬는 모래와 먼지 알갱이가 미끄러져 내려 생긴 것이라는 결과가 나왔다.[79]
6. 1. 얼음 발견
2009년 9월 ''Science'' 저널에 실린 한 논문에서는 화성의 일부 새로운 충돌구에서 비교적 순수한 물 얼음이 발굴되었다는 사실을 보고했다. 드러난 후 얼음은 승화되어 서서히 사라진다. 이 새로운 충돌구들은 CTX 카메라에 의해 발견되고 연대가 측정되었으며, 얼음의 존재는 CRISM을 사용하여 확인되었다. 얼음은 5곳에서 발견되었는데, 그중 3곳은 세브레니아 사각형에 있다. 이 위치는 , , 이다. 나머지 두 곳은 디아크리아 사각형에 있다: 와 .SHARAD의 레이더 결과는 엽상 파편 앞치마(LDA)라고 불리는 지형이 다량의 물 얼음을 포함하고 있음을 시사한다. 바이킹 궤도선 시대부터 관심의 대상이었던 이 LDA는 절벽 주변을 둘러싼 물질의 앞치마이다. 이들은 볼록한 지형과 완만한 경사를 가지고 있으며, 이는 가파른 원천 절벽에서 멀어지는 흐름을 시사한다. 또한 엽상 파편 앞치마는 지구의 암석 빙하와 마찬가지로 표면 선형을 보일 수 있다.[74] SHARAD는 헬라스 평원의 LDA가 얇은 파편층(즉, 암석과 먼지)으로 덮인 빙하라는 강력한 증거를 제공했다. LDA 상단과 하단에서 강한 반사가 관찰되었는데, 이는 순수한 물 얼음이 형성의 대부분을 구성함을 시사한다(두 반사 사이). ''피닉스'' 착륙선의 실험과 궤도에서의 ''화성 오디세이'' 연구를 바탕으로, 물 얼음은 화성의 북쪽과 남쪽(고위도) 지표면 바로 아래에 존재하는 것으로 알려져 있다.[75][76]
6. 2. 염화물 퇴적물 및 수성 광물
MRO는 광범위한 염화물 광물 퇴적물을 발견했다. 증거에 따르면 이 퇴적물은 광물이 풍부한 물의 증발로 형성되었으며, 이는 화성 표면에 호수가 산재했을 가능성을 시사한다. 일반적으로 염화물은 용액에서 가장 마지막으로 석출되는 광물이다. 탄산염, 황산염, 실리카는 염화물보다 먼저 침전되어야 한다. 화성 탐사 로버는 표면에서 황산염과 실리카를 발견했다. 염화물 광물이 있는 곳에는 한때 다양한 생명체가 존재했을 수 있으며, 고대 생명체의 흔적을 보존했을 가능성도 있다.2009년, CRISM 팀은 물이 존재하는 환경에서 형성된 9~10가지 종류의 광물에 대한 보고서를 발표했다. 여러 지역에서 다양한 종류의 점토(점토광물)가 발견되었는데, 여기에는 알루미늄 스멕타이트, 철/마그네슘 스멕타이트, 카올리나이트, 프레나이트, 녹니석이 포함된다. 이시디스 분지 주변에서는 탄산염이 함유된 암석이 발견되었으며, 탄산염은 생명체가 진화했을 수 있는 광물 중 하나이다. 마리너 협곡 주변 지역에서는 수화된 실리카와 수화된 황산염이 발견되었다. 연구자들은 테라 메리디아니와 마리너 협곡에서 수화된 황산염과 철 광물을 확인했다. 화성에서 발견된 다른 광물에는 자로사이트, 알루나이트, 적철광, 오팔, 석고가 있다. 2~5가지 종류의 광물은 생명체가 성장할 수 있도록 적절한 pH와 충분한 물을 가지고 형성되었다.
6. 3. 반복 경사선 (Recurring Slope Lineae, RSL)
2011년 8월 4일 (태양일 ), NASA는 화성 정찰위성(MRO)이 경사면의 어두운 줄무늬(Recurring Slope Lineae, RSL)를 감지했으며, 이는 화성 표면 또는 지하의 흐르는 염수로 인한 것으로 보인다고 발표했다. 2015년 9월 28일, NASA는 특별 기자 회견을 통해 이 발견을 공식적으로 확인했다.[77][78] 그러나 2017년, 추가 연구에 따르면 이 어두운 줄무늬는 모래와 먼지 알갱이가 경사면을 따라 미끄러져 내려 생긴 것이며, 물이 지면을 어둡게 만든 것이 아니라는 것이 밝혀졌다.[79]
7. 우주선 시스템
MRO는 두 개의 태양전지판을 이용하여 전력을 생산한다. 각 전지판은 5.35m × 2.53m 크기로, 3,744개의 태양전지로 구성되어 9.5m2의 면적을 가진다.[55] 이 고효율 태양전지는 태양 에너지의 26% 이상을 전기로 변환하여 32볼트의 전력을 생산한다. 화성 궤도에서는 총 600W~2000W의 전력을 생산할 수 있다.[62][55][4]
태양을 향하지 않을 때는 두 개의 니켈-수소 전지를 사용하여 전력을 공급한다. 각 배터리는 50암페어시(180kC)의 저장 용량을 가지지만, 전압 제약으로 인해 전체 용량을 사용하지는 않는다. 배터리 수명 연장을 위해 운영자는 배터리 용량의 40%만 사용할 것으로 예상한다.
MRO의 주 컴퓨터는 133MHz, 1040만 트랜지스터의 32비트 RAD750 프로세서이다. 이 프로세서는 방사선 경화된 PowerPC 750 또는 G3 프로세서의 맞춤형 마더보드 장착 버전이다. 운영체제는 VxWorks이며, 광범위한 오류 방지 프로토콜과 모니터링 기능을 갖추고 있다.
데이터는 160Gbit(20GB) 플래시 메모리 모듈에 저장되며, 700개가 넘는 각각 256Mbit 용량의 메모리 칩으로 구성된다. HiRISE 카메라의 단일 이미지가 최대 28GB에 달할 수 있어, 획득 데이터 양에 비해 메모리 용량이 크지 않다.
MRO의 통신 시스템은 발사 당시 심우주 탐사에 사용된 가장 뛰어난 시스템으로, 이전 화성 탐사 임무보다 10배 이상 빠른 속도로 데이터를 전송할 수 있었다.[63] 심우주통신망을 통해 지구와 통신하며, 8.41 GHz의 X 대역 주파수와 32 GHz의 Ka 대역을 사용한다.[64] 3m 크기의 고이득 안테나(High Gain Antenna)를 사용하여 최대 6 Mbit/s의 속도로 데이터를 전송할 수 있지만, 평균 전송 속도는 0.5~4 Mbit/s이다.[63]
MRO에는 100와트 X 대역 트래블링 웨이브 튜브 증폭기(TWTA)(백업용 포함), 35와트 Ka 대역 증폭기, 그리고 두 개의 소형 심우주 트랜스폰더(SDST)가 탑재되어 있다.[65] 비상시에는 두 개의 저이득 안테나를 사용하여 저속 통신을 할 수 있다.
Ka 대역 하위 시스템은 미래 우주선에서 이러한 시스템을 사용하는 방법을 보여주기 위해 사용되었다. NASA 심우주통신망(DSN)은 34m 빔파이프 안테나 서브넷을 통해 골드스톤, 캔버라, 마드리드의 세 복합 시설에 Ka 대역 수신 기능을 구현했다.[64] 2013년 11월까지 MRO는 200테라비트가 넘는 과학 데이터를 전송했는데, 이는 지난 10년 동안 NASA 제트추진연구소(JPL)가 관리하는 다른 모든 임무를 통해 전송된 총 데이터량의 3배가 넘는 양이다.[68]
MRO는 1175L(약 1187kg)의 히드라진 단일추진제가 채워진 연료탱크를 사용하며, 외부 탱크의 가압 헬륨 가스를 추가하여 연료 압력을 조절한다. 추진제의 70%는 궤도 진입에 사용되었으며, 2030년대까지 기능을 유지할 수 있는 충분한 추진제를 보유하고 있다.[69]
MRO에는 20개의 로켓 엔진 추력기가 탑재되어 있으며, 다음과 같이 구성된다.
| 종류 | 개수 | 추력 | 용도 |
|---|---|---|---|
| 대형 추력기 | 6개 | 각 170N (총 1,020N) | 주로 궤도 진입 |
| 중형 추력기 | 6개 | 각 22N | 궤적 수정 기동, 궤도 진입 중 자세 제어 |
| 소형 추력기 | 8개 | 각 0.9N | 정상 작동 중 자세 제어 |
고해상도 이미징과 같이 매우 안정적인 플랫폼이 필요한 작업 중 정밀한 자세 제어에는 4개의 반응 휠도 사용된다. 각 휠의 무게는 10kg이며, 최대 100Hz 또는 6,000rpm의 속도로 회전할 수 있다.[70]
우주선의 궤도를 결정하고 기동을 용이하게 하기 위해, 16개의 태양 센서(주 센서 8개, 백업 센서 8개)와 두 개의 항성 추적기(디지털 카메라)가 사용된다. 허니웰이 제공한 주 및 백업 소형 관성 측정 장치(MIMU)는 우주선 자세의 변화와 중력 이외의 원인으로 발생하는 선형 속도 변화를 측정한다. 각 MIMU는 3개의 가속도계와 3개의 링 레이저 자이로스코프의 조합이다. 이러한 시스템은 MRO가 고품질 사진을 촬영하기 위해 카메라의 방향을 매우 정밀하게 조정해야 하기 때문에 매우 중요하다.[71][72]
7. 1. 구조
MRO의 구조는 대부분 탄소 복합재와 알루미늄 허니컴 판으로 만들어졌다.[61] 티타늄(titanium) 연료 탱크는 우주선의 부피와 질량의 대부분을 차지하며, 우주선의 구조적 완전성 대부분을 제공한다.[61] 우주선의 총 질량은 2180kg 미만이며, 연료를 채우지 않은 건조 질량은 1031kg 미만이다.7. 2. 전력 시스템
MRO는 두 개의 태양전지판에서 모든 전력을 얻는다. 각 태양전지판의 크기는 5.35m × 2.53m이며, 3,744개의 개별 태양전지로 덮여 있어 9.5m²의 면적을 갖는다.[55] 고효율 태양전지는 태양에서 받는 에너지의 26% 이상을 전기로 직접 변환할 수 있으며, 총 32 볼트의 출력을 생성하도록 연결되어 있다. 화성 궤도를 돌 때, 전지판은 총 600~2000 와트의 전력을 생산한다.[62][55][4]MRO는 태양을 향하지 않을 때 우주선에 전력을 공급하는 데 사용되는 두 개의 니켈-수소 전지를 가지고 있다. 각 배터리는 50 암페어시(180 kC)의 에너지 저장 용량을 가지고 있다. 우주선의 전압 제약으로 인해 배터리의 전체 용량을 사용할 수는 없지만, 운영자는 배터리 수명을 연장할 수 있다. 계획 담당자는 우주선의 수명 동안 배터리 용량의 40%만 필요할 것으로 예상한다.
7. 3. 전자 시스템
MRO의 주 컴퓨터는 133MHz, 1040만 트랜지스터, 32비트 RAD750 프로세서(방사선 경화된 PowerPC 750 또는 G3 프로세서의 맞춤형 마더보드 장착 버전)이다. 운영체제 소프트웨어는 VxWorks이며, 광범위한 오류 방지 프로토콜과 모니터링 기능을 갖추고 있다.데이터는 700개가 넘는 각각 256Mbit 용량의 메모리 칩으로 구성된 160Gbit(20GB) 플래시 메모리 모듈에 저장된다. HiRISE 카메라의 단일 이미지가 최대 28GB에 달할 수 있다는 점을 고려하면, 획득해야 하는 데이터 양에 비해 이 메모리 용량은 실제로 크지 않다.
7. 4. 통신 시스템
MRO의 통신 시스템은 발사 당시 심우주 탐사에 사용된 가장 뛰어난 디지털 통신 시스템으로, 이전 화성 탐사 임무보다 10배 이상 빠른 속도로 데이터를 전송할 수 있었다.[63]MRO는 심우주통신망을 통해 지구와 통신하며, 8.41 GHz의 X 대역 주파수와 더 높은 데이터 전송률을 위한 32 GHz의 Ka 대역을 사용한다.[64] 3m 크기의 고이득 안테나(High Gain Antenna)를 사용하며, 최대 6 Mbit/s의 속도로 데이터를 전송할 수 있다. 평균 전송 속도는 0.5~4 Mbit/s이다.[63]
MRO에는 100와트 X 대역 트래블링 웨이브 튜브 증폭기(TWTA)(백업용 포함), 35와트 Ka 대역 증폭기, 그리고 두 개의 소형 심우주 트랜스폰더(SDST)가 탑재되어 있다.[65]
비상시나 특별한 상황에서는 두 개의 저이득 안테나를 사용하여 저속 통신을 할 수 있다. 이 안테나는 집속 장치가 없어 어떤 방향에서든 송수신이 가능하며, 주 안테나가 지구에서 멀리 떨어져 있을 때에도 MRO와 통신할 수 있는 중요한 백업 시스템이다.[66][67]
Ka 대역 하위 시스템은 미래 우주선에서 이러한 시스템을 사용하는 방법을 보여주기 위해 사용되었다. 8.41 GHz X 대역 주파수 부족으로 인해, 미래의 고속 심우주 임무는 32 GHz Ka 대역을 사용할 것이다. NASA 심우주통신망(DSN)은 34m 빔파이프 안테나 서브넷을 통해 골드스톤, 캔버라, 마드리드의 세 복합 시설에 Ka 대역 수신 기능을 구현했다.[64]
2013년 11월까지 MRO는 200테라비트가 넘는 과학 데이터를 전송했다. 이는 지난 10년 동안 NASA 제트추진연구소(JPL)가 관리하는 다른 모든 임무를 통해 NASA 심우주통신망을 통해 전송된 총 데이터량의 3배가 넘는 양이다.[68]
7. 5. 추진 및 자세 제어
MRO는 1,175리터(약 1,187kg)의 히드라진 단일추진제가 채워진 연료탱크를 사용한다. 외부 탱크의 가압 헬륨 가스를 추가하여 연료 압력을 조절한다. 추진제의 70%는 궤도 진입에 사용되었으며, 2030년대까지 기능을 유지할 수 있는 충분한 추진제를 보유하고 있다.[69]MRO에는 20개의 로켓 엔진 추력기가 탑재되어 있다.
- 6개의 대형 추력기는 각각 170N의 추력을 생성하여 총 1,020N의 추력을 제공하며, 주로 궤도 진입을 위해 사용된다. 이 추력기는 원래 마스 서베이어 2001 착륙선을 위해 설계되었다.
- 6개의 중형 추력기는 각각 22N의 추력을 생성하여 궤적 수정 기동과 궤도 진입 중 자세 제어에 사용된다.
- 8개의 소형 추력기는 각각 0.9N의 추력을 생성하여 정상 작동 중 자세 제어에 사용된다.
고해상도 이미징과 같이 매우 안정적인 플랫폼이 필요한 작업 중 정밀한 자세 제어에는 4개의 반응 휠도 사용된다. 작은 움직임도 이미지 흐릿하게 만들 수 있다. 각 휠은 하나의 운동 축에 사용되며, 네 번째 휠은 다른 세 개의 휠 중 하나가 고장날 경우를 대비한 백업이다. 각 휠의 무게는 10kg이며, 최대 100Hz 또는 6,000rpm의 속도로 회전할 수 있다.[70]
우주선의 궤도를 결정하고 기동을 용이하게 하기 위해, 태양 방향을 궤도선 기준으로 보정하기 위한 16개의 태양 센서(주 센서 8개, 백업 센서 8개)가 우주선 주변에 배치되어 있다. 카탈로그에 등록된 항성의 위치를 매핑하는 데 사용되는 두 개의 항성 추적기(디지털 카메라)는 NASA에 우주선의 방향과 자세에 대한 완벽한 3축 정보를 제공한다. 허니웰이 제공한 주 및 백업 소형 관성 측정 장치(MIMU)은 우주선 자세의 변화와 중력 이외의 원인으로 발생하는 선형 속도 변화를 측정한다. 각 MIMU는 3개의 가속도계와 3개의 링 레이저 자이로스코프의 조합이다. 이러한 시스템은 모두 MRO에 매우 중요한데, MRO는 임무에 필요한 고품질 사진을 촬영하기 위해 카메라의 방향을 매우 정밀하게 조정해야 하기 때문이다. 또한 진동으로 인한 이미지 왜곡 없이 장비가 이미지를 촬영할 수 있도록 우주선의 진동을 최소화하도록 특별히 설계되었다.[71][72]
8. 연표
MRO는 2006년부터 여러 차례 임무를 연장하며 화성 탐사를 계속하고 있다.
| 날짜 | 사건 |
|---|---|
| 2006년 9월 29일 | MRO가 과학 궤도에서 첫 번째 고해상도 이미지를 촬영했다. 이 이미지를 통해 지름 90cm 정도의 물체까지 식별할 수 있게 되었다. |
| 2006년 10월 6일 | MRO가 촬영한 빅토리아 분화구와 분화구 가장자리 위에 있는 오퍼튜니티 로버의 상세 사진이 공개되었다. |
| 2006년 11월 | 화성 기후 사운더(MCS)의 스테핑 메커니즘과 (HiRISE)의 여러 CCD에서 문제가 발생했다. |
| 2006년 11월 17일 | MRO의 궤도 통신 중계 시험이 성공했다. 스피릿 로버를 통해 데이터를 지구로 전송했다.[16] |
| 2008년 5월 25일 | HiRISE가 보레알리스 평원에 낙하산을 이용해 하강 중인 피닉스 착륙선을 촬영했다.[17] |
| 2009년 | 궤도선에 반복적인 문제가 발생하여 4개월간 가동이 중단되었다. |
| 2010년 3월 3일 | MRO가 지구로 100테라비트 이상의 데이터를 전송했다.[19] |
| 2012년 8월 6일 | 궤도선이 화성과학연구소 임무의 착륙 지점인 게일 분화구 상공을 통과하며, HiRISE 카메라를 통해 덮개와 초음속 낙하산으로 하강하는 큐리오시티 로버의 이미지를 촬영했다.[21] |
| 2015년 1월 | MRO가 2003년 착륙 단계에서 손실되었던 영국의 비글 2의 잔해를 발견했다.[22][28] |
| 2015년 7월 29일 | MRO가 2018년 11월 26일에 착륙한 인사이트 화성 착륙선 임무의 통신 지원을 위해 새로운 궤도에 진입했다.[29] |
| 2017년 이후 | 여러 MRO 구성 요소가 노후화되기 시작했다. 특히 HiRISE의 사진 흐릿함과 배터리 성능 저하 문제가 발생했지만 해결되었다.[33] |
| 2023년 8월 | HiRISE의 CCD RED4 센서 내 전자 장치가 고장 나기 시작했다.[34] |
9. 비용
화성 정찰 위성(MRO)의 주요 임무 종료 시까지 총 비용은 7.166억달러였다. 이 금액 중 4.166억달러는 우주선 개발에, 약 9000만달러는 발사에, 2.1억달러는 5년간의 임무 운영에 사용되었다. 2011년 이후 화성 정찰 위성(MRO)의 연간 운영 비용은 물가 상승률을 고려하여 평균 3100만달러이다.[73]
참조
[1]
웹사이트
Mars Reconnaissance Orbiter
https://solarsystem.[...]
NASA's Solar System Exploration website
2022-12-01
[2]
웹사이트
Mars Reconnaissance Orbiter
https://mars.nasa.go[...]
2023-07-29
[3]
웹사이트
428154main_Planetary_Science.pdf
https://www.nasa.gov[...]
2023-07-29
[4]
논문
An overview of the Mars Reconnaissance Orbiter (MRO) science mission
2007
[5]
웹사이트
pds-geosciences.wustl.edu/missions/mro/docs/mro_mission.txt
https://pds-geoscien[...]
2023-07-29
[6]
웹사이트
NASA Evaluates Four Candidate Sites for 2016 Mars Mission
http://www.nasa.gov/[...]
2023-07-29
[7]
논문
The science process for selecting the landing site for the 2020 Mars rover
https://www.scienced[...]
2023-07-29
[8]
웹사이트
Approach: Trajectory Correction Maneuvers 4, 5, & 6 – NASA
https://mars.nasa.go[...]
2023-08-18
[9]
웹사이트
Mars Reconnaissance Orbiter Interplanetary Cruise Navigation
https://issfd.org/IS[...]
2022-08-21
[10]
논문
An overview of the Mars Reconnaissance Orbiter (MRO) science mission
2007
[11]
웹사이트
Every mission to Mars ever
https://www.planetar[...]
2023-08-22
[12]
웹사이트
NASA – NASA Mars Reconnaissance Orbiter Reaches Planned Flight Path
https://web.archive.[...]
2023-08-18
[13]
웹사이트
Solar Conjunction {{!}} Mars in our Night Sky
https://mars.nasa.go[...]
2023-08-18
[14]
논문
An overview of the Mars Reconnaissance Orbiter (MRO) science mission
2007-05-12
[15]
웹사이트
Thermal Systems – NASA
https://mars.nasa.go[...]
2023-08-21
[16]
웹사이트
NASA's Newest Mars Orbiter Passes Communications Relay Test
https://mars.nasa.go[...]
2023-01-20
[17]
웹사이트
PIA10705: Phoenix Descending with Crater in the Background
https://photojournal[...]
2023-01-20
[18]
웹사이트
In Depth {{!}} Mars Reconnaissance Orbiter
https://solarsystem.[...]
2023-02-21
[19]
웹사이트
Scientists Wowed by Data From Mars Probe
https://www.nbcnews.[...]
2013-04-21
[20]
웹사이트
NASA Extends Exploration for 8 Planetary Science Missions
https://mars.nasa.go[...]
2023-07-07
[21]
웹사이트
Curiosity Spotted on Parachute by Orbiter
https://mars.nasa.go[...]
2023-01-20
[22]
웹사이트
Mars Reconnaissance Orbiter – In Depth
https://solarsystem.[...]
2020-04-24
[23]
웹사이트
NASA's Mars Reconnaissance Orbiter Studies Comet Flyby
http://www.jpl.nasa.[...]
2014-10-20
[24]
웹사이트
NASA's Mars Odyssey Orbiter Watches Comet Fly Near
http://www.jpl.nasa.[...]
2014-10-20
[25]
웹사이트
NASA's MAVEN Studies Passing Comet and Its Effects
http://www.jpl.nasa.[...]
2014-10-20
[26]
웹사이트
All Three NASA Mars Orbiters Healthy After Comet Flyby
http://www.jpl.nasa.[...]
2014-10-20
[27]
뉴스
A Comet's Brush With Mars
https://www.nytimes.[...]
2014-10-20
[28]
뉴스
Beagle 2 Mars probe was 'excruciatingly close' to success, new research reveals
https://www.theguard[...]
2023-03-07
[29]
웹사이트
Mars orbiter prepares for next year's InSight lander arrival
https://newatlas.com[...]
2023-01-21
[30]
웹사이트
NASA Mars Orbiter Preparing for Mars Lander's 2016 Arrival
http://www.nasa.gov/[...]
2015-07-30
[31]
뉴스
NASA InSight lander arrives on Martian surface
https://mars.nasa.go[...]
2018-11-26
[32]
뉴스
Mars Reconnaissance Orbiter Preparing for Years Ahead
https://www.jpl.nasa[...]
JPL Press Office
2020-04-24
[33]
웹사이트
HiRISE Team Overcomes Imaging Glitches as Mars Reconnaissance Orbiter Eyes another Decade in Orbit
https://www.planetar[...]
2023-08-04
[34]
웹사이트
HiRISE {{!}} Image Catalog
https://www.uahirise[...]
2023-10-31
[35]
웹사이트
NASA Retires Mineral Mapping Instrument on Mars Orbiter
http://www.nasa.gov/[...]
2023-06-23
[36]
웹사이트
Mars Reconnaissance Orbiter By the Numbers
https://mars.nasa.go[...]
2023-08-18
[37]
웹사이트
SATELLITE IMAGERY FOR EVERYONE
https://spectrum.iee[...]
2023-07-06
[38]
웹사이트
HiRISE Views NASA's InSight and Curiosity on Mars
https://mars.nasa.go[...]
2023-07-29
[39]
웹사이트
A Decade of Compiling the Sharpest Mars Map
https://mars.nasa.go[...]
2023-08-04
[40]
웹사이트
New Interactive Mosaic Uses NASA Imagery to Show Mars in Vivid Detail
http://www.nasa.gov/[...]
2023-08-04
[41]
웹사이트
NASA – NSSDCA – Experiment – Details
https://nssdc.gsfc.n[...]
2023-02-02
[42]
웹사이트
MARS RECONNAISSANCE ORBITER (MRO) MARS COLOR IMAGER (MARCI) INSTRUMENT DESCRIPTION
https://www.msss.com[...]
Malin Space Science Systems
2023-02-02
[43]
웹사이트
CRISM
https://mars.nasa.go[...]
2023-01-20
[44]
논문
A synthesis of Martian aqueous mineralogy after 1 Mars year of observations from the Mars Reconnaissance Orbiter
2009-09-22
[45]
웹사이트
NASA Extends Exploration for 8 Planetary Science Missions
https://www.nasa.gov[...]
2022-04-26
[46]
서적
2008 IEEE Aerospace Conference
IEEE
2008-03
[47]
웹사이트
MRO Science Instruments
https://science.nasa[...]
2024-07-01
[48]
웹사이트
Citizen scientists detect patterns in clouds over Mars
https://www.space.co[...]
2024-07-01
[49]
논문
Mars Climate Sounder Observation of Mars' 2018 Global Dust Storm
https://agupubs.onli[...]
2024-07-01
[50]
잡지
Martian Blizzard! It's Snowing on the Red Planet
https://science.time[...]
2024-07-01
[51]
웹사이트
MRO MCS
https://arcnav.psi.e[...]
2023-01-20
[52]
논문
Mars Climate Sounder: An investigation of thermal and water vapor structure, dust and condensate distributions in the atmosphere, and energy balance of the polar regions
https://agupubs.onli[...]
2007-05
[53]
웹사이트
SHARAD
https://mars.nasa.go[...]
NASA
2020-04-24
[54]
웹사이트
The Electra Proximity Link Payload for Mars Relay Telecommunications and Navigation
http://trs-new.jpl.n[...]
[55]
웹사이트
Mars Reconnaissance Orbiter Arrival Press Kit
https://mars.nasa.go[...]
2023-01-20
[56]
웹사이트
Mars Reconnaissance Orbiter Telecommunications
https://descanso.jpl[...]
2023-01-20
[57]
웹사이트
Electra
https://mars.nasa.go[...]
2023-01-20
[58]
웹사이트
PIA10368: Phobos from 6,800 Kilometers (Color)
https://photojournal[...]
2023-07-16
[59]
웹사이트
Ka-band – NASA
https://mars.nasa.go[...]
2023-08-21
[60]
웹사이트
Accelerometers – NASA
https://mars.nasa.go[...]
2023-08-18
[61]
웹사이트
Spacecraft Parts: Structures
http://marsprogram.j[...]
2023-01-20
[62]
웹사이트
Electrical Power
https://mars.nasa.go[...]
2023-01-31
[63]
웹사이트
Mars Reconnaissance Orbiter Telecommunications
https://descanso.jpl[...]
2023-08-20
[64]
서적
2005 IEEE Aerospace Conference
IEEE
2023-01-31
[65]
논문
Mars Reconnaissance Orbiter Ka-Band (32 GHz) Demonstration: Cruise Phase Operations
https://citeseerx.is[...]
2023-01-31
[66]
웹사이트
Antennas – NASA
https://mars.nasa.go[...]
2023-02-01
[67]
웹사이트
Mars Reconnaissance Orbiter Spacecraft
https://pds-geoscien[...]
2023-02-01
[68]
뉴스
Prolific NASA Mars Orbiter Passes Big Data Milestone
http://www.jpl.nasa.[...]
2013-11-09
[69]
뉴스
NASA to rely on Mars programme's silent workhorse for years to come
http://astronomynow.[...]
2015-08-20
[70]
웹사이트
Control Devices
https://mars.nasa.go[...]
2023-01-31
[71]
웹사이트
Sensors
https://mars.nasa.go[...]
2023-01-20
[72]
웹사이트
Mars Reconnaissance Orbiter Design Approach for High-Resolution Surface Imaging
http://trs-new.jpl.n[...]
American Astronautical Society
2023-07-29
[73]
웹사이트
Cost of the Mars Reconnaissance Orbiter
https://www.planetar[...]
The Planetary Society
2020-04-24
[74]
뉴스
NASA Spacecraft Detects Buried Glaciers on Mars
https://www.jpl.nasa[...]
2008-11-20
[75]
웹사이트
NASA Phoenix Mars Lander Confirms Frozen Water
https://www.nasa.gov[...]
2023-01-20
[76]
웹사이트
Odyssey Finds Water Ice in Abundance Under Mars' Surface
https://mars.nasa.go[...]
2023-01-20
[77]
뉴스
NASA Says Signs of Liquid Water Flowing on Mars
https://www.nytimes.[...]
2015-09-28
[78]
논문
Spectral evidence for hydrated salts in recurring slope lineae on Mars
2015-09-28
[79]
웹사이트
Recurring Martian Streaks: Flowing Sand, Not Water?
https://www.nasa.gov[...]
2023-07-19
[80]
웹사이트
NASA Goes Back to the Future With Plans for a Mars Rover in 2003
http://www.jpl.nasa.[...]
2006-07-07
[81]
웹사이트
NASA Unveils Plans for 21st Century Mars Campaign
https://web.archive.[...]
2006-07-04
[82]
웹사이트
Spacecraft Parts: Instruments
https://web.archive.[...]
2008-05-17
[83]
웹사이트
HiRISE, High Resolution Imaging Science Experiment
http://hirise.lpl.ar[...]
2008-05-17
[84]
웹사이트
MRO Context Imager (CTX) Instrument Description
http://www.msss.com/[...]
2008-05-17
[85]
웹사이트
"MRO Mars Color Imager (MARCI) Description"
http://www.msss.com/[...]
2008-05-17
[86]
웹사이트
"CRISM"
http://crism.jhuapl.[...]
2008-05-17
[87]
웹사이트
"Mars Climate Sounder Team Website"
http://www.planetary[...]
2008-05-17
[88]
웹사이트
"SHARAD: Mars Shallow Subsurface Radar"
http://www.sharad.or[...]
2008-05-17
[89]
웹사이트
Mars Orbiter Successfully Makes Big Burn
http://www.space.com[...]
2006-08-30
[90]
문서
대기의 마찰 효과를 이용한 감속
[91]
웹인용
Spacecraft Parts: Telecommunications
https://web.archive.[...]
2006-05-28
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com