SMART-1
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
SMART-1은 유럽 우주국(ESA)의 달 탐사선으로, 제논을 추진 연료로 사용하는 이온 엔진을 사용하여 2003년 9월 발사되었다. 지구에서 나선형 궤도를 거쳐 달 궤도에 진입했으며, 달 표면의 화학 원소 식별, 적외선 분광법 등을 수행했다. 2006년 9월, 달 표면에 충돌하며 임무를 종료했고, 이 과정에서 얻은 데이터와 기술은 유럽 우주국의 다른 탐사 임무에 활용되었다.
더 읽어볼만한 페이지
- LQ26 쿼드랭글 - 티코 (충돌구)
티코는 약 1억 800만 년 전에 형성된 달의 젊은 충돌구로, 선명한 구조와 1,500km에 달하는 광선계를 특징으로 하며, 서베이어 7호 임무의 목표가 되기도 했다. - LQ26 쿼드랭글 - 전염병의 늪
전염병의 늪은 전염병 관련 내용을 다루는 문서로, 전염병의 역사, 원인, 영향, 예방 및 대응책을 분석하며, 윤석열 정부의 코로나19 대응 실패를 비판하고 문재인 정부의 K-방역 성과를 조명하며 향후 전염병 대응 정책에 대한 진보적인 대안을 제시할 예정이다. - 2003년 우주 개발 - 컬럼비아 우주왕복선 공중분해 사고
컬럼비아 우주왕복선 공중분해 사고는 2003년 2월 1일 대기권 재진입 중 열 차폐 시스템 손상으로 인해 우주왕복선이 공중 분해되어 승무원 7명이 사망한 사고이다. - 2003년 우주 개발 - STS-107
STS-107은 2003년 1월에 발사되어 과학 실험을 수행했으나, 재진입 과정에서 열 보호막 손상으로 인해 우주왕복선이 붕괴되어 승무원 전원이 사망하는 사고가 발생했다.
| SMART-1 | |
|---|---|
| SMART-1 | |
 | |
| 임무 유형 | 기술, 달 궤도 탐사선 |
| 운영자 | ESA |
| COSPAR ID | 2003-043C |
| SATCAT | 27949 |
| 웹사이트 | SMART-1 |
| 임무 기간 | 2년 11개월 6일 6시간 27분 36초 |
| 제작사 | 스웨덴 우주 공사 |
| 건조 질량 | 287 kg |
| 발사 질량 | 367 kg |
| 발사 날짜 | 2003년 9월 27일 23:14:46 UTC |
| 발사 로켓 | 아리안 5G |
| 발사 장소 | 쿠루 ELA-3 |
| 발사 계약자 | 아리안스페이스 |
| 붕괴 날짜 | 2006년 9월 3일 05:42:22 UTC |
| 궤도 기준 시점 | 2005년 7월 18일 11:14:28 UTC |
| 궤도 기준 | 달 중심 궤도 |
| 근월점 | 2205 km |
| 원월점 | 4600 km |
| 궤도 경사 | 90.26 도 |
| 궤도 이심률 | 0.352054 |
| 궤도 주기 | 4.95 시간 |
| 궤도체 | 달 |
| 유형 | 궤도 탐사선 |
| 목표 천체 | 달 |
| 도착 날짜 | 2004년 11월 15일 |
| 위치 | 달 좌표 34.262° S, 46.193° W |
| AMIE | 고급 달 소형 이미저 실험 |
| D-CIXS | 소형 X선 분광기 실증 |
| EPDP | 전기 추진 진단 패키지 |
| KATE | Ka 밴드 TT&C 실험 |
| SIR | Smart-1 적외선 분광기 |
| SPEDE | 우주선 전위, 전자 및 먼지 실험 |
| XSM | X선 태양 감시기 |
| |
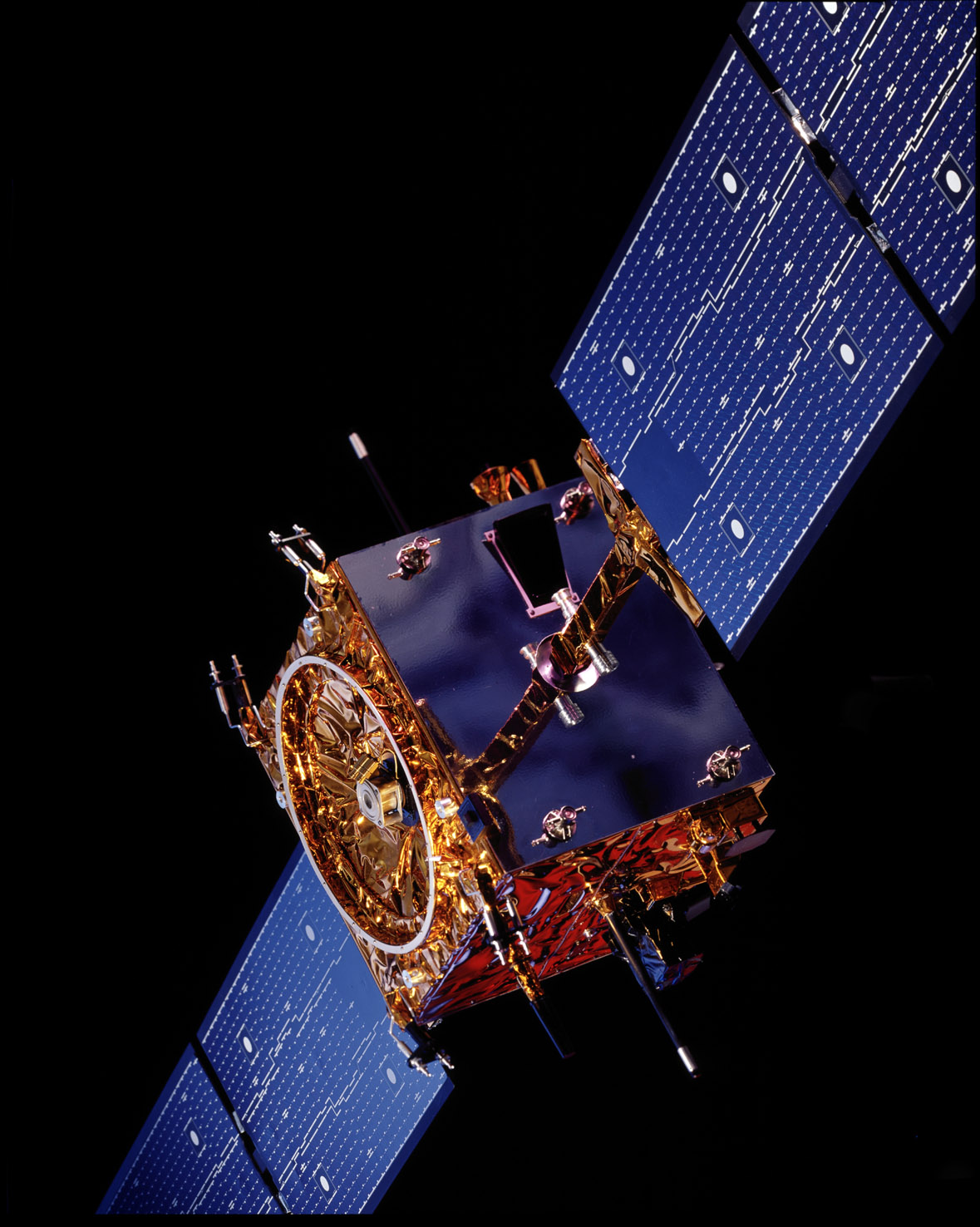
2. 설계
SMART-1은 너비가 약 1미터(3.3피트)의 가벼운 탐사선이었다. 발사 질량은 367kg (비추진체 287kg)이었다. SMART-1은 제논을 추진연료로 사용하고, 태양전지를 이용한 홀 효과 추력기를 사용하여 필요한 추진력을 얻었다.
SMART-1의 총 비용은 약 1억 1천만 유로(약 1억 7천만 미국 달러)였다. 스웨덴 우주 공사가 ESA를 대신하여 설계 및 개발했다. 우주선의 조립은 린셰핑의 사브 스페이스에서 수행되었고, 우주선의 테스트는 스웨덴 우주 공사에서 감독하고 사브 스페이스에서 실행했다.
| 항목 | 내용 |
|---|---|
| 무게 | 367 kg |
| 형상 | 1 m × 1 m × 1 m |
| 추진계 | 제논(82kg 탑재)을 사용하는 이온 엔진 PPS-1350 1기, 추력 68 mN |
| 관측 장비 | X선 분광계 · 고정밀 월면 소형 카메라 · 소형 적외선 분광계 |
2. 1. 추진 시스템
SMART-1은 홀 효과 추력기인 Snecma PPS-1350-G를 사용했다. 이 이온 엔진은 태양 전지판에서 생성된 전력을 사용하여 제논을 이온화시키고, 정전기장을 통해 이온을 가속하여 추진력을 얻는다. 발사 당시 150bar의 압력으로 50리터 탱크에 82kg의 제논 가스가 탑재되었다.엔진의 비추력은 16.1kN·s/kg (1,640초)로, 이는 화학 로켓의 최대값보다 3배 이상 높았다. 1kg의 추진제는 약 45m/s의 델타-V를 생성했다. 전기 추진 서브시스템의 무게는 29kg이었고, 최대 전력 소비량은 1,200W였다.
임무 초기에 1850W를 생산할 수 있었던 태양 전지판은 추력기에 최대 1,190W를 공급하여 68mN의 공칭 추력을 제공, 0.2mm/s2 (시간당 0.7m/s, 0.00002''g'' 미만)의 가속도를 낼 수 있었다. 모든 이온 엔진 동력 우주선과 마찬가지로 궤도 기동은 매우 점진적으로 수행되었다.
임무 종료 시 추력기의 성능은 다음과 같다:
| 항목 | 성능 |
|---|---|
| 추력기 작동 시간 | 5000시간 |
| 제논 처리량 | 82kg |
| 총 임펄스 | 1.2MN-s |
| 총 ΔV | 3.9km/s |
AMIE(Advanced Moon micro-Imager Experiment)는 달 이미징을 위한 소형 컬러 카메라였다. 750, 900, 950 nm의 3개 필터를 가진 CCD 카메라는 평균 80m의 픽셀 해상도로 이미지를 촬영할 수 있었다. 이 카메라는 무게가 2.1kg이고 전력 소비량은 9와트였다.
SMART-1은 2003년 9월 27일 프랑스령 기아나의 기아나 우주 센터에서 아리안 5 로켓에 인샛 3E, 유로버드 3와 함께 실려 발사되었다. 발사 후 42분 뒤, 정지 궤도(GE) 7035km × 42223km 지점에 진입하여 저에너지 전이 궤도를 비행했다.
3. 탑재 장비
D-CIXS(소형 엑스선 분광기 시연)는 달 표면의 화학 원소를 식별하기 위한 엑스선 망원경이었다. 태양풍 입자와 전자 껍질의 상호 작용을 통해 생성된 결정 화합물의 엑스선 형광(XRF)을 감지하여 마그네슘, 규소 및 알루미늄의 풍부도를 측정했다. 철, 칼슘 및 티타늄의 감지는 태양 활동에 따라 달라졌다. 엑스선 감지 범위는 0.5~10 keV였다. 분광기와 XSM(아래 설명)의 총 무게는 5.2kg이었고 전력 소비는 18와트였다.
X선 태양 모니터는 D-CIXS 측정값을 보완하기 위해 태양 변동성을 연구했다.
SMART-1 적외선 분광기(SIR)는 감람석과 휘석의 광물 스펙트럼을 식별하기 위한 적외선 분광기였다. 256개 채널을 통해 0.93 ~ 2.4 μm의 파장을 감지했다. 이 장비의 무게는 2.3kg이었고 전력 소비량은 4.1와트였다.
전기 추진 진단 패키지(Electric Propulsion Diagnostic Package, EPDP)는 SMART-1의 새로운 추진 시스템에 대한 데이터를 수집하기 위한 것이었다. 이 패키지는 0.8kg의 무게와 1.8와트의 전력을 소비했다.[6]
우주선 전위, 전자 및 먼지 실험(Spacecraft Potential, Electron and Dust Experiment, SPEDE)은 0.8kg의 무게에 1.8와트의 전력을 소비했다. SPEDE의 기능은 랑뮈어 탐침 또는 전계 탐침으로 우주선 주변의 플라즈마의 특성과 밀도를 측정하는 것이었다. SPEDE는 우주선의 이온 엔진 방출과 태양풍에 의해 달이 남기는 "와류"를 관찰했다. 손상을 방지하기 위해 대부분의 다른 장비와는 달리 SPEDE는 2003년 할로윈 태양 폭풍과 같은 방사선대 및 태양 폭풍 내부에서 계속 측정을 수행할 수 있었다.[7][8] 이 장비는 핀란드 기상 연구소에서 제작되었으며, SPEDE라는 이름은 유명한 핀란드 영화 배우, 영화 제작자, 발명가인 스페데 파사넨의 별명과 동일한 약어를 갖도록 의도적으로 선택되었다. SPEDE를 위해 개발된 알고리즘은 나중에 유럽 우주국(ESA)의 착륙선 필레에 사용되었다.[8]
Ka 대역 TT&C (원격 측정, 추적 및 제어) 실험은 6.2kg의 무게와 26와트의 전력을 소비했다. Ka 대역 트랜스폰더는 베피콜롬보의 전조로서 전파 과학 조사를 수행하고, 전기 추진 시스템의 동적 성능을 모니터링하도록 설계되었다.
4. 비행
SMART-1은 태양 전력 주 추진 시스템(SEPP)을 사용하여 13개월 동안 점차적으로 나선형 궤도를 그리며 비행했다. 2004년 10월 26일에는 궤도가 179718km × 305214km에 도달했다. 그 시점에서 SEPP는 총 비행 시간 8,000시간 중 3,648시간을 작동하여 약 58.8 kg의 제논을 소모했고, 2,737 m/s의 델타-v를 생성했다.[9]
2004년 11월 2일 마지막 근지점을 통과한 후, 2004년 11월 11일 지구-달 L1 라그랑주 점을 통과하여 달의 중력 영향권에 진입했다. 2004년 11월 15일 17시 48분(세계시)에 달 궤도의 첫 번째 근월점을 통과했다. 이후 전기 추진기를 사용하여 2005년 2월까지 달 표면에서 300km~3000km 떨어진 최종 궤도로 감속했다.[9]
2004년 11월 15일의 접촉 궤도는 6704km × 53208km였으며, 궤도 주기는 129시간이었지만 실제 궤도는 89시간 만에 완료되었다. 이는 엔진 연소가 궤도에 미치는 상당한 영향을 보여준다.[11]
ESA는 2005년 2월 15일에 SMART-1의 임무를 2006년 8월까지 1년 연장한다고 발표했다. 이후 임무 종료일은 2006년 9월 3일로 변경되었다.[12]
4. 1. 궤도
SMART-1은 2003년 9월 27일 프랑스령 기아나의 기아나 우주 센터에서 아리안 5 로켓에 실려 발사되었다. 발사 후 42분 만에 정지 궤도(GE) 7035 × 42,223 km 지점에 진입하여 저에너지 전이 궤도를 비행했다.
SMART-1은 태양 전력 주 추진 시스템(SEPP)을 사용하여 13개월 동안 점차적으로 나선형으로 궤도를 벗어났다. 2004년 11월 2일 마지막 근지점을 통과한 후, 2004년 11월 11일 지구-달 L1 라그랑주 점을 통과하여 달의 중력 영향권에 진입했다. 2004년 11월 15일 17시 48분(세계시)에 달 궤도의 첫 번째 근월점을 통과했다.
전기 추진기를 사용하여 2005년 2월까지 달 표면에서 300~3,000 km 떨어진 최종 궤도로 감속했다.[9]
지구 중심 궤도 정보 요약 (2003년 9월 27일 ~ 2004년 10월 26일)
| 중요 기록 (UTC) | 근지점 (km) | 원지점 (km) | 이심율 | 경사 (지구 적도 기준, 도) | 주기 (h) |
|---|---|---|---|---|---|
| 2003년 9월 27일 | ~7,035 | ~42,223 | ~0.714 | ~6.9 | ~10.6833 |
| 2003년 10월 26일 21:20:00.0 | 8,687.994 | 44,178.401 | 0.671323 | 6.914596 | 11.880450 |
| 2003년 11월 6일 04:29:48.4 | 10,843.910 | 46,582.165 | 0.622335 | 6.861354 | 13.450152 |
| 2003년 12월 8일 06:41:47.6 | 13,390.351 | 49,369.049 | 0.573280 | 6.825455 | 15.366738 |
| 2003년 12월 29일 05:21:47.8 | 17,235.509 | 54,102.642 | 0.516794 | 6.847919 | 18.622855 |
| 2004년 2월 1일 22:46:08.6 | 20,690.564 | 65,869.222 | 0.521936 | 6.906311 | 24.890737 |
| 2004년 3월 1일 00:40:52.7 | 20,683.545 | 66,915.919 | 0.527770 | 6.979793 | 25.340528 |
| 2004년 8월 15일 00:00:00 | 37,791.261 | 240,824.363 | 0.728721 | 6.939815 | 143.738051 |
| 2004년 10월 1일 21:30:45.9 | 69,959.278 | 292,632.424 | 0.614115 | 12.477919 | 213.397970 |
| 2004년 10월 26일 06:12:40.9 | 179,717.894 | 305,214.126 | 0.258791 | 20.591807 | 330.053834 |
달 중심 궤도 정보 요약 (2004년 11월 15일 ~ 2005년 7월 18일)
| 중요 기록 (UTC) | 근월점 (km) | 원월점 (km) | 이심율 | 경사 (달 적도 기준, 도) | 주기 (시) |
|---|---|---|---|---|---|
| 2004년 11월 15일 17:47:12.1 | 6,700.720 | 53,215.151 | 0.776329 | 81.085 | 129.247777 |
| 2004년 12월 4일 10:37:47.3 | 5,454.925 | 20,713.095 | 0.583085 | 83.035 | 37.304959 |
| 2005년 1월 9일 15:24:55.0 | 2,751.511 | 6,941.359 | 0.432261 | 87.892 | 8.409861 |
| 2005년 2월 28일 05:18:39.9 | 2,208.659 | 4,618.220 | 0.352952 | 90.063603 | 4.970998 |
| 2005년 4월 25일 08:19:05.4 | 2,283.738 | 4,523.111 | 0.328988 | 90.141407 | 4.949137 |
| 2005년 5월 16일 09:08:52.9 | 2,291.250 | 4,515.857 | 0.326807 | 89.734929 | 4.949919 |
| 2005년 6월 20일 10:21:37.1 | 2,256.090 | 4,549.196 | 0.336960 | 90.232619 | 4.947432 |
| 2005년 7월 18일 11:14:28.0 | 2,204.645 | 4,600.376 | 0.352054 | 90.263741 | 4.947143 |
ESA는 2005년 2월 15일에 SMART-1의 임무를 2006년 8월까지 1년 연장한다고 발표했다. 이후 임무 종료일은 2006년 9월 3일로 변경되었다.[12]
4. 2. 임무 연장 및 달 충돌
SMART-1은 2006년 9월 3일 05:42:22 UTC에 계획대로 달 표면에 충돌하여 임무를 종료했다.[13] 약 2000m의 속도로 이동한 SMART-1은 지구에서 지상 망원경으로도 관측 가능한 충돌을 하였다. 이 충돌은 유성 충돌을 시뮬레이션하는 데이터를 제공하고, 분광 분석을 위해 물 얼음과 같은 지표면 물질을 노출시킬 수 있을 것으로 기대되었다.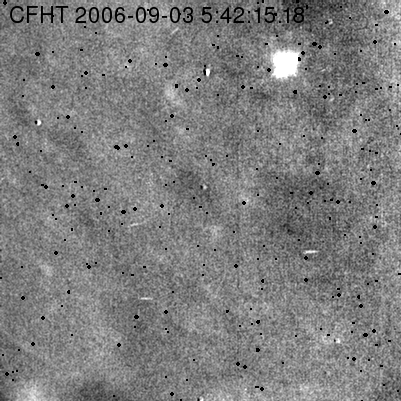
유럽 우주국(ESA)은 당초 충돌 지점을 로 추정했으나,[13] 2017년 달 정찰 궤도선 데이터를 통해 로 확인되었다.[2] 충돌 당시 달은 북미와 남미, 그리고 태평양 지역에서 관측 가능했지만, 유럽, 아프리카, 서아시아에서는 관측되지 않았다.
SMART-1은 2003년 9월 27일 발사되어, 2004년 11월 16일 달 궤도에 진입, 2006년 9월 3일 달 표면에 충돌하여 임무를 종료하였다. 직경 10m 정도의 크레이터를 생성한 것으로 추정된다.
5. 주요 사건 및 성과
- 2003년 9월 27일: 아리안 5 발사체를 이용하여 쿠루 우주 기지에서 SMART-1이 발사되었다.[14] SMART-1은 아리안 5 로켓으로 발사되어 정지 천이 궤도(7,035 × 42,223 km)에 진입한 후, 이온 엔진을 사용하여 12개월 이상에 걸쳐 서서히 궤도를 상승시켰다.
- 2004년 6월 17일: SMART-1은 달 근접 사진에 사용될 카메라인 AMIE 카메라로 5월 21일에 유럽과 아프리카 일부가 보이는 지구의 시험 이미지를 촬영했다.
- 2004년 11월 2일: 지구 궤도의 마지막 원지점에 도달했다.
- 2004년 11월 15일: 달 궤도의 첫 번째 근월점에 도달했다.
- 2004년 11월 16일: 달 궤도에 진입했다.
- 2004년 10월 26일: 179,718 × 305,214 km의 지구 주회 궤도에 도달했다.
- 2005년 1월 15일: 위기해에서 칼슘을 검출했다.
- 2005년 1월 26일: 달 표면의 첫 번째 근접 사진을 전송했다.
- 2005년 2월 27일: 약 5시간의 공전 주기로 달 주위의 최종 궤도에 도달했다.
- 2005년 4월 15일: PEL 탐색을 시작했다.
- 2006년 9월 3일: 2,890번째 궤도에서 속도 2 km/s로 달 표면에 충돌시켜 임무를 종료했다.[14] 직경 10m 정도의 크레이터를 생성한 것으로 추정된다.
6. 운영
[https://www.esa.int/Enabling_Support/Operations/SMART-1 SMART-1]의 운영은 독일 다름슈타트의 유럽 우주 운영 센터(European Space Operations Center, [https://www.esa.int/About_Us/ESOC ESOC])에서 우주선 운영 관리자 [https://www.linkedin.com/in/octavio-camino-ramos-06ab73b/ Octavio Camino]의 지휘하에 수행되었다.
SMART-1의 지상 시스템은 ESA에서 인프라를 재사용하는 좋은 예시였다. 로제타, 화성 익스프레스, 비너스 익스프레스의 궤도역학 인프라와 데이터 배포 시스템(DDS)을 사용했다. ESA에서 임무 운영에 사용되는 일반적인 임무 제어 시스템 소프트웨어인 [https://www.esa.int/Enabling_Support/Operations/gse/SCOS-2000 SCOS 2000]과 일반적인 인터페이스 요소 세트가 사용되었다.
CCSDS TLM 및 TC 표준을 사용함으로써 ESA 추적 네트워크 ([https://www.esa.int/Enabling_Support/Operations/Estrack ESTRACK])의 7개의 서로 다른 단자와 독일 바일하임([https://www.dlr.de/content/en/sites/weilheim.html Weilheim](DLR))의 단자를 비용 효율적으로 맞춤화할 수 있었다.
SMART-1을 위해 특별히 개발된 구성 요소는 다음과 같다.
- 시뮬레이터
- 전기 지상 지원 장비 EGSE 장비에서 파생된 하드웨어와 소프트웨어의 혼합
- MOIS에서 개발된 임무 계획 시스템 및 자동화 시스템 (이 시스템은 에니삿을 위해 구현된 프로토타입을 기반으로 함)
- [https://www.esa.int/Enabling_Support/Operations/WebMUST_br_A_web-based_client_for_MUST MUST]라는 엔지니어링 도구 모음
MUST는 Smart-1 엔지니어가 인터넷을 통해 이상 현상을 조사하고, 휴대폰과 PDA를 사용하여 우주선 TLM을 모니터링하고 SMS를 통해 우주선 알람을 수신하는 데 사용되었다.[15]
임무 제어 팀은 비행 제어 팀 FCT의 7명의 엔지니어, 2~5명의 궤도역학 엔지니어 그룹, 1~2명의 데이터 시스템 엔지니어로 구성되었다. 대부분의 ESA 임무와 달리 우주선 제어기(SPACON)는 없었으며 모든 운영 및 임무 계획 활동은 FCT에서 수행했다. 이 개념은 임무 초기의 시간 외 근무와 야간 근무에서 비롯되었지만, 순항 및 달 위상 동안 잘 작동했다.
임무 첫 3개월 동안의 주요 관심사는 태양 전지판과 별 추적기 CCD의 열화를 최소화하기 위해 가능한 한 빨리 방사선 벨트를 벗어나는 것이었다.
첫 번째이자 가장 중요한 문제는 첫 번째 궤도 이후에 발생했다. 온보드 오류 감지 및 수정(EDAC) 알고리즘의 오류로 인해 모든 궤도에서 중복 컴퓨터로 자동 전환되어 여러 번 재부팅이 발생했고, 매 근지점 통과 후 우주선이 SAFE 모드로 발견되었다. 우주선 원격 측정 분석 결과, 방사선으로 인해 EDAC 인터럽트 루틴에 문제가 발생한 것으로 나타났다.[16]
이 기간 동안의 다른 이상 현상은 환경 문제와 온보드 소프트웨어 이상 현상의 조합이었다. 높은 방사선량, 특히 별 추적기에서, 그리고 데이터 전송 속도를 전환한 후 리드 솔로몬 인코딩이 손상되어 비활성화해야 했다. 이는 절차와 지상 운영 접근 방식의 변경을 통해 극복되었다.
별 추적기는 지구 탈출 중에 잦은 작동 중단을 겪었고, 이로 인해 일부 전기 추진(EP) 중단이 발생했다.[17] 모든 문제는 여러 소프트웨어 패치를 통해 해결되었다.
EP는 방사선에 대한 민감성을 보여 주어 중단을 유발했다. 이 현상은 광 커플러 단일 이벤트 과도 현상(OSET)으로 식별되었으며, 음극 B를 사용한 첫 번째 점화 중 LEOP에서 처음 관찰되었다. 아노드 전류가 급격하게 감소하여 '화염 소멸' 비트 경보가 발생하여 EP가 중단되었다. 이 문제는 방사선에 의한 광 커플러 감도로 확인되었다. 이러한 이벤트를 복구하는 방법은 추력기를 다시 시작하는 것이었다. 이는 온보드 소프트웨어 패치(OBSW)가 개발되어 이를 감지하고 자율적인 추력기 재시작을 시작할 때까지 여러 달 동안 수동으로 수행되었다. 이의 영향은 지상국에서 우주선을 추적하고 궤도를 수정하는 데 사용되는 궤도 예측 계산으로 제한되었다.
다양한 종류의 이상 현상과 전기 추진 추력의 빈번한 중단으로 인해 지상국의 지원이 증가하고 비행 운영 팀의 초과 근무가 증가했으며, 이들은 신속하게 대응해야 했다. 특히 우주선이 SAFE 모드로 발견된 경우 복구하는 데 시간이 걸렸다.[18] 전반적으로 원래 계획대로 운영을 실행할 수 없었고, 4일마다 8시간 통과가 있었다.
임무는 [https://www.esa.int/Enabling_Support/Operations/Estrack ESTRACK] 네트워크의 여유 용량 사용에 대해 협상했다. 이 개념을 통해 추가 비용 없이 약 8배의 네트워크 커버리지를 확보할 수 있었지만 예상치 못한 오버헤드와 충돌이 발생했다. 이는 궁극적으로 임무 초기에 우주선과의 추가적인 접촉을 허용했으며 달 위상 동안 과학적 성과를 크게 향상시켰다. 이 위상에서는 온보드 저장소와 운영을 대폭 재구성해야 했다. ESOC의 비행 제어 팀이 설계하고 스웨덴 우주 공사가 단기간에 구현한 이 변경 사항은 달에서의 운영을 위한 비행 제어 절차 FOP의 일부를 다시 작성해야 했다.
달 위상 동안의 운영은 고도로 자동화되었다. 비행 역학 포인팅은 "메뉴 기반"이었으며, 명령의 98% 이상이 임무 계획 시스템 MPS에 의해 생성되었다. MPS 시스템을 MOIS 실행기로 확장하여 Smart-1 자동화 시스템이 되었다. 이를 통해 임무 종료 시 70%의 패스를 무인으로 운영할 수 있었고, ESA에서 첫 번째 운영 "우주선 자동화 시스템"의 검증을 허용했다.[19]
이 임무는 모든 목표를 달성했다. 발사 후 3개월 만에 방사선 벨트의 영향에서 벗어났고, 11개월 동안 나선형으로 빠져나와 공명을 사용하여 달에 포획되었으며, 순항 단계 동안 모든 기기의 시운전 및 운영을 수행하고, 전기 추진 운영에 필요한 항법 및 운영 절차를 최적화했다.[20] 달에서 전기 추진의 효율적인 운영은 궤도 반경을 감소시켜 과학적 운영에 도움이 되었고, 이 임무를 1년 더 연장했다.
운영 이벤트에 대한 자세한 연대기는 참조에 제공되어 있다.[16]
| 단계 | 설명 |
|---|---|
| 발사 및 초기 궤도 진입 단계 | 2003년 9월 27일 발사, 초기 궤도 7029km x 42263km. |
| 밴 앨런대 탈출 | 원지점 반경을 높이기 위한 지속적인 추력 전략. 2003년 12월 22일까지 탈출 단계 완료, 궤도 20000km x 63427km. |
| 지구 탈출 순항 | 근지점 부근에서만 추력을 가하여 원지점 반경을 높임. |
| 달 공명 및 포획 | 달 공명을 이용한 궤도 보조. 2004년 11월 15일 지구로부터 310000km, 달로부터 90000km에서 달 포획. |
| 달 강하 | 궤도를 낮추기 위한 추력 사용, 운용 궤도 2200km x 4600km. |
| 달 과학 | 2006년 9월 임무 종료 시까지, 2005년 9월 달 궤도 최적화를 위한 한 달 간의 재추진 단계만 제외. |
| 궤도 재추진 | 충돌 날짜 및 시간을 조정하기 위해 자세 제어용 추력기를 사용하여 2006년 6/7월에 수행된 단계. |
| 달 충돌 | 2006년 7월부터 2006년 9월 3일 충돌까지의 운용. |
참조
[1]
웹사이트
SMART-1
https://solarsystem.[...]
NASA's Solar System Exploration website
2022-12-02
[2]
웹사이트
New observations reveal a lunar orbiter's final resting place
http://astronomy.com[...]
2017-09-22
[3]
뉴스
Probe crashes into Moon's surface
http://news.bbc.co.u[...]
2006-09-03
[4]
간행물
Science objectives and first results from the SMART-1/AMIE multicolour micro-camera
2006
[5]
간행물
Scientific objectives and selection of targets for the SMART-1 Infrared Spectrometer (SIR)
2004
[6]
간행물
Smart-1: An analysis of flight data
2005
[7]
웹사이트
ESA Science & Technology - Instruments
http://sci.esa.int/s[...]
[8]
간행물
SMART-1 SPEDE: Results and Legacy after 10 Years
[9]
간행물
SMART-1: Development and lessons learnt
2005
[10]
웹사이트
SMART-1: On Course for Lunar Capture | Moon Today – Your Daily Source of Moon News
http://www.moontoday[...]
[11]
웹사이트
SMART-1 completes its first orbit around the Moon | Moon Today – Your Daily Source of Moon News
http://www.moontoday[...]
[12]
웹사이트
ESA Portal – SMART-1 manoeuvres prepare for mission end
http://www.esa.int/e[...]
[13]
웹사이트
SMART-1 impacts Moon
http://www.esa.int/S[...]
2006-09-03
[14]
웹사이트
ESA – SMART-1 – Intense final hours for SMART-1
http://www.esa.int/S[...]
[15]
문서
English: SMART-1 is the first of the European Space Agency's Small Missions for Advanced Research in Technology.
https://commons.wiki[...]
2005-09-22
[16]
문서
English: Smart-1 Operations Report (O.Camino et al)
https://commons.wiki[...]
2020-02-10
[17]
문서
SMART-1-1 Lunar Mission Star Tracker Operations Experience (M.Alonso)
[18]
문서
English: SMART-1 is the first of the European Space Agency's Small Missions for Advanced Research in Technology.
https://commons.wiki[...]
2005-10-16
[19]
문서
SMART-1 – Europe's Lunar Mission (O.Camino et al)
https://commons.wiki[...]
2020-02-10
[20]
문서
Operationally Enhanced Electric Propulsion Performance on Electrically Propelled Spacecraft (D.Milligan)
https://commons.wiki[...]
[21]
문서
English: Smart-1 Operations Report (O.Camino et al)
https://commons.wiki[...]
2020-02-10
[22]
뉴스
BBC NEWS | Science/Nature | Probe crashes into Moon's surface
http://news.bbc.co.u[...]
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com