소나
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
소나는 물속에서 음파를 이용하여 물체를 탐지하고 통신하는 기술로, 돌고래나 박쥐가 사용하는 원리를 인간이 응용한 것이다. 1490년 레오나르도 다 빈치가 최초로 기록했으며, 19세기에는 등대의 경고 수단으로 활용되었다. 1827년 수중 음파의 속도 측정, 압전 효과 발견 등을 거쳐 제1, 2차 세계 대전을 통해 잠수함 탐지 기술로 발전했다. 현재는 수동 소나와 능동 소나로 나뉘며, 군사, 어업 등 다양한 분야에서 활용된다. 소나의 성능은 환경, 장비, 표적의 특성에 따라 달라지며, 해양 포유류에게 영향을 미칠 수 있다.
더 읽어볼만한 페이지
- 소나 - 반향 위치 측정
반향 위치 측정은 동물이 소리의 반향을 이용하여 주변 환경을 인식하는 능력이며, 박쥐, 고래 등에서 나타나 먹이 탐지, 항법, 포식자 회피에 기여하고 시각장애인도 활용한다. - 소나 - 빔포밍
빔포밍은 신호 처리 기술로, 송신 시 신호의 위상과 진폭을 제어하여 특정 방향으로 전파 에너지를 집중시키고, 수신 시 특정 방향의 신호를 우선 수신하며, 일반 빔포밍과 적응형 빔포밍으로 나뉘어 여러 분야에서 활용된다. - 대잠수함전 - 어뢰
어뢰는 수중에서 스스로 움직여 목표물을 공격하는 유도 무기로, 다양한 유도 및 추진 방식과 플랫폼을 통해 해상 전투에서 중요한 역할을 수행하며, 각국 해군에서 개발 및 운용하고 있다. - 대잠수함전 - 이지스 전투 시스템
이지스 전투 시스템은 미국 해군이 개발한 함대방공 및 탄도미사일 방어 시스템으로, 다기능 레이더를 중심으로 지휘결정 시스템, 무기관제 시스템, 미사일 및 발사대를 통합 운용하며, 여러 국가 해군에서 운용 중이나 오인 사격 가능성 등의 문제점도 존재한다. - 다이빙 장비 - 잠수복
잠수복은 수중 활동 시 체온 유지와 안전을 위해 착용하는 의류로, 네오프렌 소재를 중심으로 발전하여 다양한 형태로 제작되며, 보온성과 유연성은 네오프렌 두께, 소재, 봉제 방식에 따라 달라진다. - 다이빙 장비 - 고무줄
고무줄은 탄성이 있는 고무 재질의 띠로, 물건을 묶거나 고정하는 용도 외에도 다양한 분야에서 활용되며, 천연 또는 합성 고무를 원료로 다양한 크기, 색상, 재질로 생산되는 일상적인 소모품이다.
| 소나 | |
|---|---|
| 지도 정보 | |
| 명칭 | |
| 영어 | SONAR (Sound Navigation and Ranging) |
| 한국어 | 음파 탐지기 |
| 개요 | |
| 정의 | 음파를 이용하여 수중 물체의 위치, 속도, 깊이 등을 탐지하는 장비 및 기술 |
| 작동 원리 | 음파를 발사하고 반사되어 돌아오는 음파를 분석하여 물체의 존재와 거리를 파악 |
| 종류 | 능동 소나: 음파를 발사하여 반향음을 분석 수동 소나: 물체에서 발생하는 소리를 청취 |
| 주요 용도 | 군사적 목적: 잠수함 탐지, 어뢰 유도, 기뢰 탐색 등 어업: 어군 탐지 해양 탐사: 해저 지형 측정, 난파선 탐사 과학 연구: 해양 생물 연구, 해저 지진 연구 항해: 선박의 위치 파악 및 항해 보조 |
| 역사 | |
| 초기 형태 | 19세기 말, 빙산 탐지를 위해 처음 개발 |
| 제1차 세계 대전 | 잠수함 탐지를 위한 실용적인 소나 개발 시작 |
| 제2차 세계 대전 | 소나 기술 급속한 발전, 전장에서 광범위하게 사용 |
| 현대 | 디지털 기술 발전으로 더욱 정밀하고 다양한 기능 탑재 |
| 기술 상세 | |
| 능동 소나 | 음파를 발사하여 반사파를 분석, 거리, 방향, 속도 등을 측정 |
| 수동 소나 | 외부에서 발생한 소리를 수신하여 목표물을 탐지 및 식별 |
| 주파수 | 저주파 소나: 원거리 탐지에 유리 고주파 소나: 정밀한 탐지에 유리 |
| 배열 | 단일 소자 소나: 한 개의 송수파기로 구성 다중 소자 소나: 여러 개의 송수파기로 구성, 더 정확한 정보 획득 가능 |
| 신호 처리 | 잡음 제거, 신호 증폭, 목표물 식별 등의 복잡한 신호 처리 과정 필요 |
| 수중 음향학 | 소나 기술 개발의 핵심 학문 분야, 음파의 전달과 반사 특성 연구 |
| 군사적 이용 | |
| 잠수함 탐지 | 수중에서 은밀하게 움직이는 잠수함을 탐지, 잠수함전의 핵심 |
| 어뢰 유도 | 어뢰에 장착되어 목표물을 추적하고 공격을 유도 |
| 기뢰 탐색 | 수중에 설치된 기뢰를 탐지하여 안전한 항로 확보 |
| 대잠수함전 | 소나를 활용한 대잠수함 작전 수행 |
| 해군 함정 | 함정의 주요 탐지 장비, 항해 및 작전에 필수적 |
| 민간 이용 | |
| 어업 | 어군 탐지, 어장 확인, 어획량 증대 |
| 해양 탐사 | 해저 지형 측정, 해저 자원 탐사, 난파선 탐사 |
| 해양 과학 연구 | 해양 생물 연구, 해저 지진 연구, 해양 환경 연구 |
| 항해 | 선박의 위치 파악, 항해 안전 보조, 수심 측정 |
| 관련 용어 | |
| 음향학 | 소리와 관련된 물리적 현상 연구 학문 |
| 수중 음향학 | 수중에서 음파의 전달과 특성 연구 |
| 반향 정위 | 음파를 이용하여 물체의 위치나 방향을 파악하는 능력 |
| 변환기 | 전기 에너지를 음향 에너지로, 또는 음향 에너지를 전기 에너지로 변환하는 장치 |
| 도플러 효과 | 음원의 운동에 따라 관측되는 주파수 변화 현상 |
| 음향 방사 | 음파가 매질을 통해 퍼져 나가는 현상 |
| 음향 수신기 | 수중에서 음파를 감지하고 전기 신호로 변환하는 장치 |
| 기타 | |
| 음향 감지 | 능동 소나와 수동 소나 외에도 다양한 음향 감지 기술 존재 |
| 항공기용 | 항공기에서 사용되는 소나와 유사한 음파 탐지 장비 |
| 로봇 | 수중 로봇에 탑재되어 수중 환경 탐색 및 작업 수행 |
2. 역사
소나의 역사는 수 세기 전으로 거슬러 올라간다. 레오나르도 다 빈치가 1490년에 물속에 튜브를 넣어 멀리 있는 배의 소리를 듣는 방법을 기록한 것이 인간에 의한 최초의 수중 음파 사용 기록이다.[101] 19세기에는 등대의 위험 경고 보조 수단으로 수중 종소리가 사용되었다.
1827년 스위스의 다니엘 콜라돈과 프랑스의 찰스 스트름은 레만호에서 수중 음파의 속도를 측정했다. 1880년대에는 제임스 프레스콧 줄이 자기변형 효과를, 피에르 퀴리와 자크 퀴리 형제가 압전효과를 발견하면서 소나의 기본 원리가 마련되었다.
20세기에 들어서면서 수중 음향학의 실용적인 응용이 시작되었다. 수중 종을 이용한 거리 측정 시스템이 개발되었으나, 곧 전파 항법이 등장하면서 널리 보급되지는 않았다. 1912년 타이타닉호 침몰 사고는 해상 빙산 탐지 기술의 필요성을 부각시켰다.
1914년 레지널드 페센덴은 능동 소나의 원형을 개발하여 빙산 탐지에 성공했다. 제1차 세계 대전 발발 후 잠수함의 위협이 커지면서 대잠전 기술 개발이 시급해졌다. 하이드로폰(패시브 소나)이 먼저 사용되었고, 1917년에는 폴 랑주뱅 박사가 압전 효과를 이용한 능동 소나를 만들었다. 랑주방의 소나 장치는 초음파로 날카로운 빔을 형성하여 프랑스 해군의 주목을 받았고, 1918년에는 잠수정 탐지에 성공했다. 이후 능동식 ASDIC(능동 소나)가 개발되었으나 실용화는 1920년에 이루어졌다. 미국 해군의 QA는 1927년부터 해상 시험을 시작했다. 이러한 서치라이트 소나는 여러 나라에서 개발되어 제2차 세계 대전에서 실전에 투입되었다.
전쟁 중기부터 제2차 세계대전 기간에는 특수한 해양 음향 환경이 알려졌고, 수치 예측 예보 기술 개발이 이루어졌다. 전후에는 디지털 신호 처리 기술의 발달로 스캐닝 소나가 보급되고 저주파화가 진행되었다. 대잠전의 패시브화에 따라 패시브 소나 기술 개발이 병행되었으며, C4I 시스템의 발달과 함께 양자를 조합한 멀티스태틱 소나 기술도 개발되고 있다.
2. 1. 초기 역사
돌고래, 박쥐와 같은 동물들이 통신이나 물체 탐지를 위해 음파(초음파)를 사용한 지는 수천만 년 전부터이다. 인간이 수중에서 음파를 처음 사용한 것은 1490년 레오나르도 다 빈치의 기록(튜브 막대를 물속에 넣은 후 귀에 대고 멀리 있는 배 소리를 들음)이 최초이다.[101] 19세기에는 등대의 위험 경고 보조 수단으로 수중 종소리가 이용되었다.1827년 스위스의 물리학자 다니엘 콜라돈(Daniel Colladon)과 프랑스의 수학자 찰스 스트름(Charles Sturm)은 전등 불빛과 수중 종소리의 시간차로 수중 음파의 속도를 측정했다. 1880년에는 자크(Jacques)와 피에르 퀴리(Pierre Curie) 형제가 압전효과를 발견하고, 제임스 줄(James Joule)이 자왜현상(Magnetostrictive Phenomena)과 유사한 변환 현상을 발견했다. 이것들이 현재 소나의 기본 원리이다.
소나는 탐지 목표물이 방사하는 소음을 듣고 방위를 알아내는 수동 소나와, 음파를 방사하고 물체에 부딪혀 돌아오는 반향음(echo)을 잡아 방위와 거리를 알아내는 능동 소나로 나뉜다. 두 방법 모두 음파, 센서, 그리고 신호를 운용자가 알 수 있는 방식으로 표시하는 신호처리기(전자 장비)가 주요 요소이다. 진공관 발명 전까지는 소나가 크게 발전하지 못했다. 그러나 1912년 타이타닉호 침몰 사건으로 능동 소나의 필요성이 커졌고, 제1차 세계대전 발발 후 독일 U-보트로 인한 피해가 커지면서 소나 연구가 활발해졌다.
제1차 세계대전 후, 소나는 전쟁 경험을 바탕으로 문제점 해결에 집중하여 기술이 크게 발전했다. 음파 전달 매질 특성 이해, 센서 발달, 전자공학 발달에 힘입은 탐지 자료 전시 방식의 혁신적인 출현이 두드러졌다. 그럼에도 당시 소나 성능은 매우 미흡했다.
1938년 미국 스필한스(Spilhans)는 수직 수온 측정기를 이용, 깊이에 따른 온도 및 온도 기울기가 음 전달 특성을 좌우하여 탐지 불능대가 생긴다는 것을 알아냈다.
제2차 세계대전 중 잠수함 위협이 커지면서 소나 의존도와 기술도 함께 높아졌다. 레이다처럼 지향성 빔을 만들어 360도 소인하며 탐지하는 소나가 개발되었고, 소나 이론 및 실제에 중요한 센서 감도 정의 및 교정법 개발, 표적 반사 강도, 수중 잔향 소음 등 음향 인자가 규명되었으며, 스텔스(Stealth)화로 불리는 음파 반사 억제 재질도 개발되었다. 이때 소나의 형식을 갖추고 소나라는 용어가 탄생했다.
제2차 세계대전 후에는 PZT 계열 압전소자 적용으로 감도가 향상된 센서가 사용되었고, 전자공학 발달로 다양하고 복잡한 배열 센서 신호를 실시간 처리하는 현대 소나의 면모를 갖추며 발전했다.
1970년대까지 아날로그 회로 기반이었다면, 1980년대 이후는 디지털 기술 발전으로 시·공간적 신호 처리가 가능해져 다양한 용도의 소나가 나왔고, 더 많은 정보 수집·분석 및 사격 통제가 가능하도록 장비 구성이 복잡해지고 통합 체계화되었다.
2. 2. 제1차 세계 대전과 ASDIC
레오나르도 다 빈치는 1490년에 물속에 튜브를 넣어 멀리 있는 배 소리를 들은 것을 기록했는데, 이것이 인간에 의한 최초의 수중 음파 사용 기록이다.[101] 1912년 타이타닉호 침몰 사건으로 능동 소나의 필요성이 커졌고, 제1차 세계 대전 발발 후 독일 U-보트로 인한 피해가 급증하면서 소나 연구가 활발해졌다.제1차 세계 대전 중 잠수함 탐지의 필요성으로 인해 음파 연구가 활발해졌다. 영국은 하이드로폰(hydrophone)이라는 수중 청음 장치를 초기에 사용했고, 프랑스의 폴 랑주뱅(Paul Langevin)은 1915년 잠수함 탐지를 위한 능동형 음파 장치 개발에 착수했다.
1916년, 영국 발명 및 연구 위원회(Board of Invention and Research) 산하에서 캐나다 물리학자 로버트 윌리엄 보일(Robert William Boyle)은 A. B. 우드와 함께 능동 음파 탐지 프로젝트를 진행하여 1917년 중반 시험용 시제품을 제작했다. 이들은 석영 압전 결정을 사용하여 세계 최초의 실용적인 수중 능동 음파 탐지 장치를 개발했다. 이 연구는 "ASD"ics로 명명되었고, 여기서 "ASD"는 "Anti-Submarine Division"의 약자이며, 영국식 약어인 ''ASDIC''의 유래이다. 1939년, 옥스포드 영어 사전(Oxford English Dictionary)의 질문에 대한 답변으로 해군성은 "연합군 잠수함 탐지 조사 위원회(Allied Submarine Detection Investigation Committee)"라는 이야기를 지어냈지만,[15] 해군성 기록 보관소에서 이러한 이름을 가진 위원회는 발견되지 않았다.[16]
1918년까지 영국과 프랑스는 시제품 능동 시스템을 개발했다. 영국은 1920년에 HMS 앤트림에서 ASDIC을 시험했고 1922년에 생산을 시작했다.
2. 3. 제2차 세계 대전과 SONAR
제2차 세계 대전 중 잠수함의 위협이 커지면서 소나의 중요성이 더욱 부각되었고, 기술 발전도 가속화되었다. 레이다와 같이 지향성 빔을 만들어 360도 회전하며 탐지하는 소나가 개발되었고, 소나의 이론 및 실제상 중요한 센서 감도의 정의 및 교정법 개발, 표적반사 강도, 수중잔향소음과 같은 음향적인 요소들이 규명되었다. 또한, 오늘날 스텔스(Stealth) 기술의 시초라고 할 수 있는 음파 반사 억제 재질의 개발 등이 이루어졌다. 이때 비로소 현대적인 소나의 형태가 갖춰졌고, "소나(SONAR)"라는 용어가 탄생했다.[19] 소나는 "Sound Navigation and Ranging"의 약자로, 프레더릭 헌트가 레이더에 상응하는 용어로 만들어냈다.[19]1930년대 미국 엔지니어들은 자체 수중 음파 탐지 기술을 개발했고, 온도약층의 존재와 그것이 음파에 미치는 영향과 같은 중요한 발견을 했다.[18] 전쟁이 끝난 후에는 PZT 계열의 압전소자를 적용하여 감도가 향상된 센서가 사용되었고, 전자공학의 발달로 다양하고 복잡한 배열 센서의 신호를 실시간으로 처리할 수 있는 현대적인 소나 시스템이 구축되어 발전을 거듭하고 있다.
1917년, 미국 해군은 J. 워렌 호튼(J. Warren Horton)의 도움을 받아 전자공학(electronics)과 관련된 진공관(vacuum tube)을 수중 신호 탐지에 적용했다. 그 결과, 이전 탐지 장비에 사용되었던 탄소 버튼 마이크로폰이 현대 수중 청음기(hydrophone)의 전신으로 대체되었다. 또한, 탐지 장비를 예인하는 방법을 실험하여 장비의 감도를 향상시켰는데, 이 원리는 여전히 현대 예인 소나 시스템에서 사용된다. 제2차 세계 대전 중 호튼은 잠수함, 기뢰, 어뢰를 탐지할 수 있는 소나 시스템 개발을 계속했다. 그는 미 해군 수중 음향 연구소의 수석 연구 자문으로 1957년에 "소나의 기초(Fundamentals of Sonar)"를 출판했다.[20][21]
1915년부터 1940년까지 미국의 소나 기술은 큰 발전이 없었다. 1940년 당시 미국의 소나는 일반적으로 자기변형(magnetostrictive) 트랜스듀서와 니켈 튜브 어레이로 구성되었다. 압전(piezoelectric) 로셸염(Rochelle salt) 결정은 더 나은 매개변수를 가지고 있었지만, 자기변형 장치가 훨씬 더 안정적이었다. 제2차 세계 대전 초기에 미국의 상선 수송에 큰 손실이 발생하자, 자기변형 트랜스듀서 매개변수 개선과 로셸염 신뢰성 향상을 위한 대규모 연구가 진행되었다. 로셸염을 대체할 우수한 대안으로 인산이수소암모늄(Ammonium dihydrogen phosphate, ADP)이 발견되었고, 9개월 만에 로셸염은 구식이 되었다. ADP 제조 시설은 1940년 초 수십 명에서 1942년에는 수천 명으로 늘어났다.
ADP 결정의 초기 응용 분야 중 하나는 음향 기뢰(acoustic mine)용 수중 청음기였다. 이 결정은 5 Hz의 저주파 차단 주파수를 가지도록 설계되었고, 약 3048.00m 고도에서 항공기 투하 시 발생하는 기계적 충격을 견딜 수 있었으며, 인접한 기뢰 폭발에도 견딜 수 있었다. 또한, 음향 유도 어뢰에도 사용되었다. 잠수함용 수동 소나 어레이는 ADP 결정으로 개발되었다. 여러 개의 결정 어셈블리가 강철 튜브에 배열되었고 진공 상태에서 피마자유(castor oil)로 채워져 밀봉되었다. 그런 다음 튜브는 병렬 어레이에 장착되었다.
제2차 세계 대전 말기 미 해군의 표준 스캐닝 소나는 18 kHz에서 작동하는 ADP 결정 어레이를 사용했다. 하지만 더 긴 탐지 거리를 위해서는 더 낮은 주파수를 사용해야 했다. 필요한 크기는 ADP 결정에는 너무 컸기 때문에 1950년대 초 자기변형 및 티탄산바륨(barium titanate) 압전 시스템이 개발되었지만, 균일한 임피던스 특성을 달성하는 데 문제가 있었고 빔 패턴이 좋지 않았다. 그 후 티탄산바륨은 더 안정적인 지르콘산티탄산납(lead zirconate titanate, PZT)으로 대체되었고 주파수는 5 kHz로 낮춰졌다. 미 해군 함대는 수십 년 동안 AN/SQS-23 소나에 이 물질을 사용했다. SQS-23 소나는 처음에 자기변형 니켈 트랜스듀서를 사용했지만, 무겁고 비쌌기 때문에 압전 트랜스듀서로 대체되었다. 이 소나는 432개의 개별 트랜스듀서로 구성된 대형 어레이였다. 초기에는 트랜스듀서의 신뢰성이 떨어져 문제가 발생했고, 이를 해결하기 위해 "소모성 모듈형 설계"를 채택했다.[22]
제2차 세계 대전 초기에 일본 해군은 석영을 기반으로 한 프로젝터를 사용했다. 91식 장비의 프로젝터는 직경이 76.2cm(30인치)였고, 93식 프로젝터는 석영의 견고한 샌드위치로 구성되어 구형 주철(cast iron) 본체에 조립되었다. 93식 소나는 나중에 독일식 설계를 따르고 자기변형 프로젝터를 사용하는 3식으로 교체되었는데, 이 프로젝터는 약 40.6cm x 22.9cm(16인치 x 9인치)의 주철 직사각형 본체에 있는 두 개의 동일한 직사각형 독립 유닛으로 구성되었다. 자기변형 코어는 4mm 두께의 니켈 스탬핑으로 만들어졌고, 나중에는 철-알루미늄 합금으로 만들어졌다. 일본 해군의 수동 수중 청음기는 동선형 설계, 로셸염 압전 트랜스듀서 및 탄소 마이크로폰을 기반으로 했다.[23]
2. 4. 냉전 시대와 발전
레오나르도 다 빈치는 1490년에 수중에서 음파를 사용한 최초의 기록을 남겼으며,[101] 19세기에는 등대의 위험을 알리는 보조 수단으로 수중 종소리가 사용되었다.1827년, 스위스의 물리학자 다니엘 콜라돈과 프랑스의 수학자 찰스 스트름은 수중 음파의 속도를 측정했다. 1880년에는 자크와 피에르 퀴리가 압전효과를, 제임스 줄이 자왜 현상을 발견하여 소나의 기본 원리가 마련되었다.
타이타닉호 침몰 사건과 제1차 세계대전 중 독일 U-보트의 공격으로 능동 소나의 필요성이 대두되었다. 전쟁 이후 소나 기술은 빠르게 발전했다. 음파 전달 매질의 특성 이해, 센서 발달, 그리고 전자 공학의 발달은 탐지 자료를 보여주는 혁신적인 방식의 등장을 이끌었다. 1938년, 스필한스는 수직 수온 측정기를 고안하여 깊이에 따른 온도 기울기가 음의 전달 특성에 영향을 미쳐 탐지 불능대가 생긴다는 사실을 발견했다.
제2차 세계대전 동안 잠수함의 위협이 커지면서 소나에 대한 의존도가 높아졌고, 레이다처럼 지향성 빔을 만들어 360도 회전하며 탐지하는 소나가 개발되었다. 또한, 소나의 이론과 실제에 중요한 센서 감도의 정의 및 교정 방법, 표적 반사 강도, 수중 잔향 소음과 같은 음향적 요소들이 규명되었으며, 음파 반사를 억제하는 재질 개발도 이루어졌다.
제2차 세계대전 이후, PZT 계열의 압전소자를 적용하여 센서 감도가 향상되었고, 전자 공학의 발달로 복잡한 배열 센서의 신호를 실시간으로 처리하는 현대적인 소나가 등장했다. 1980년대 이후에는 디지털 기술의 발전으로 시공간적 신호 처리가 가능해져 다양한 용도의 소나가 나타났으며, 정보 수집, 분석 및 사격 통제가 통합되었다.
1917년, 미국 해군은 J. 워렌 호튼의 도움을 받아 전자공학과 진공관을 수중 신호 탐지에 적용했다. 그 결과, 탄소 마이크로폰이 현대 수중 청음기의 전신으로 대체되었고, 탐지 장비를 예인하는 방법이 실험되었다.
영국에서는 아일랜드 해에 해저 수중 청음기를 설치하고 해안 청음소에 잠수함 케이블로 연결하는 작업이 진행되었다. 제2차 세계 대전 중 호튼은 잠수함, 기뢰, 어뢰를 탐지할 수 있는 소나 시스템을 개발했으며, 1957년에는 "소나의 기초"를 출판했다.[20][21]
1915년부터 1940년까지 미국의 소나 기술은 크게 발전하지 못했다. 당시 미국의 소나는 자기 변형 트랜스듀서, 니켈 튜브 어레이, 그리고 로셸염 결정으로 구성되었다. 제2차 세계 대전 초기, 로셸염을 대체할 인산이수소암모늄(ADP)이 발견되어 24 kHz 로셸염 트랜스듀서를 대체했다. ADP 제조 시설은 1940년 수십 명에서 1942년 수천 명으로 증가했다.
ADP 결정은 음향 기뢰용 수중 청음기, 음향 유도 어뢰, 잠수함용 수동 소나 어레이 등에 사용되었다. 제2차 세계 대전 말, 미 해군은 18 kHz에서 작동하는 ADP 결정 어레이를 사용했다. 더 긴 탐지 거리를 확보하기 위해 1950년대 초에는 자기 변형 및 티탄산바륨 압전 시스템이 개발되었으나, 이후 티탄산바륨은 지르콘산티탄산납(PZT)으로 대체되었고 주파수는 5 kHz로 낮아졌다. 미 해군은 SQS-23 소나에 PZT를 사용했다. SQS-23 소나는 초기에는 문제가 많았지만, "소모성 모듈형 설계"를 통해 문제를 해결했다.[22]
제2차 세계 대전 초기 일본 해군은 석영 기반 프로젝터를 사용했으나, 크고 무거웠다. 93식 소나는 독일식 설계를 따라 자기 변형 프로젝터를 사용하는 3식으로 교체되었다. 일본 해군의 수동 수중 청음기는 동선형 설계, 로셸염 압전 트랜스듀서, 그리고 탄소 마이크로폰을 기반으로 했다.[23]
제2차 세계 대전 이후, 자기 변형 변환기가 연구되었다. 니켈 스크롤 와인딩 링 변환기는 고출력 저주파 작동에 사용되었고, 페라이트와 메트글라스도 연구되었으나 PZT보다 성능이 떨어졌다. 1970년대에는 희토류와 철의 화합물인 터페놀-D가 발견되어 새로운 설계가 가능해졌다. 최근에는 갈페놀이 사용된다. 가변 릴럭턴스 변환기와 가동 코일 변환기도 사용된다.[24]
레오나르도 다 빈치는 1490년에 나팔에 파이프와 청진기를 부착한 듯한 기구를 만들어 물속에서 음파가 더 잘 전달된다는 것을 확인했다.
1827년, 장-다니엘 콜라돈과 자크 샤를 프랑수아 슈툼은 레만호에서 음속 측정 실험을 했다. 19세기 후반에는 자기 변형 효과와 압전 효과가 발견되었다.
20세기 초, 수중 음향학의 실용적인 응용이 시작되었다. 수중 종을 이용한 거리 측정 시스템이 개발되었으나, 전파 항법의 등장으로 널리 보급되지는 않았다. 1912년, 타이타닉호 침몰 사고로 인해 빙산을 조기에 발견하는 기술 개발이 필요하게 되었다.
1914년, 레지널드 페센덴은 능동 소나의 원형을 개발하여 빙산 탐지에 성공했다. 제1차 세계대전 발발 후 잠수함의 위협이 커지면서 대잠수함전 기술 개발이 시급해졌다. 하이드로폰(패시브 소나)이 먼저 사용되었고, 1917년에는 랑주방 박사가 압전 효과를 이용한 능동 소나를 만들었다.
랑주방 박사의 소나 장치는 초음파를 사용하여 날카로운 빔을 형성했다. 프랑스 해군은 이 장치를 이용해 잠수정을 탐지했다. 능동식 ASDIC(능동 소나)가 개발되었으나 실용화는 1920년에 이루어졌다. 미국 해군의 QA는 1927년부터 해상 시험을 시작했다. 서치라이트 소나는 여러 나라에서 개발되어 제2차 세계대전에서 실전에 투입되었다.
전쟁 중기부터 제2차 세계대전 기간에는 특수한 해양 음향 환경이 알려졌고, 수치 예측 예보 기술 개발이 이루어졌다. 전후에는 디지털 신호 처리 기술의 발달로 스캐닝 소나가 보급되고 저주파화가 진행되었다. 대잠수함전의 패시브화에 따라 패시브 소나 기술 개발이 병행되었으며, 멀티스태틱 소나 기술도 개발되었다.
2. 5. 현대 소나 기술
1490년 레오나르도 다 빈치는 나팔에 파이프와 청진기를 부착한 듯한 기구를 만들어 작은 배에서 물속으로 늘어뜨려 멀리 있는 갤리온선의 수중음을 듣고, 음파가 물속에서 공기 중보다 더 잘 전달된다는 것을 확인했다[101]。;원리의 발명
1827년, 스위스의 장-다니엘 콜라돈과 프랑스의 자크 샤를 프랑수아 슈툼은 레만호에서 음속 측정 실험을 실시하여 소나 이론화의 시초가 되었다. 19세기 후반에는 전기에서 음향으로의 에너지 변환을 다루는 전기음향공학에 관한 많은 지식이 얻어져 수중 음향 연구에 간접적으로 기여했다. 그 대표적인 것으로 1840년대 제임스 프레스콧 줄이 발견한 자기변형 효과와 1880년 피에르 퀴리와 자크 퀴리 형제가 발견한 압전효과가 있었다.
;수중 음향학 응용
20세기에 들어서면서 수중 음향학의 실용적인 응용이 추구되기 시작했다. 먼저 위험 해역의 등대 근처에 설치된 수중 종에서 나는 소리를 이용하여 이것과 자선의 무선호각과의 시간 간격 측정으로 등대와의 거리를 측정하는 시스템이 개발되었다. 곧 전파 항법이 등장했기 때문에 이 시스템은 보급되지 않았지만, 이것을 개발하고 있던 Submarine Signal Company는 나중에 레이시온사에 합병되어 오늘날 그 계보를 남기고 있다. 1912년 타이타닉호 침몰 사고로 인해 해상에 떠 있는 멀리 있는 빙산을 조기에 발견할 필요성이 대두되자, 타이타닉호의 건조국이었던 영국뿐만 아니라 많은 희생자를 낸 미국과 프랑스에서도 새로운 기술 개발이 요구되었다.
1914년에는 미국의 과학자 레지널드 페센덴이 능동 소나의 원형이 되는 장치를 개발하여 2마일 떨어진 빙산 탐지를 성공했다[89][90]. 그의 장치는 다이내믹 스피커의 가동 코일과 같은 원리로 트랜스듀서(송수신기)를 만들어 1100Hz의 가청음으로 음향 빔을 한 방향으로 발사하여 반향파를 수신하는 것이었다.
같은 해 제1차 세계 대전이 시작되었지만, 대전 발발 한 달 후인 9월 5일, 독일 제국 해군의 잠수함(U보트) U21의 어뢰 공격으로 영국 해군의 정찰 순양함 파스파인더가 격침되었다. 그 17일 후인 9월 22일에는 U9가 3척의 크레시급 장갑 순양함을 잇달아 격침하는 등 잠수함의 위협은 극에 달했다. 이에 대항하기 위해 대잠전 기술 개발은 시급한 문제가 되었다[91]. 먼저 센서로 사용된 것이 하이드로폰(후의 패시브 소나)이며, 1915년에는 지상국이 설치되었고[92], 1916년에는 함재화가 시작되었다[93].
그 후, 1917년에는 파리 시립 공업 물리 화학 고등 전문 학교의 랑주방 박사가 수정의 압전 효과를 이용한 고성능 트랜스듀서를 개발하여 진공관식 증폭기를 함께 실용적인 능동 소나를 만들었다[94]. 랑주방 박사의 소나 장치는 100킬로헤르츠의 초음파를 지름 200mm의 진동자에서 방사함으로써 날카로운 빔을 형성하는 데 성공했다. 이 장치는 프랑스 해군의 관심을 끌어 1918년에는 1500미터 떨어진 잠수정을 발견했다. 이에 따라 개발된 것이 능동식 ASDIC(후의 능동 소나)이다. 실용화는 1920년으로 대전에는 맞추지 못했지만[92], 미국 해군의 개념 증명 모델인 QA는 1927년부터 해상 시험에 들어갔다. 이러한 서치라이트 소나는 여러 나라에서 개발되어 제2차 세계 대전에서 실전 투입되었다.
전중기에서 제2차 세계대전기에는 특수한 해양 음향 환경의 존재가 알려지게 되었고, 전후 당시의 대잠전 추세와 함께 수리적 분석을 도입한 수측 예보 기술의 개발이 추구되었다. 전후에는 디지털 신호 처리 기술의 발달을 배경으로 미국 해군이 1948년부터 함대 배치를 시작한 QHB를 계기로 위상 배열 방식을 채용한 스캐닝 소나가 보급됨과 동시에 원거리 탐지의 요구에서 저주파화가 추구되었다. 이후, 대잠전의 패시브화에 따라 패시브 소나의 기술 개발이 병행하여 진행된 외에, C4I 시스템의 발달과 함께 양자를 조합한 멀티스태틱 소나 기술의 개발도 이루어지고 있다.
3. 종류
소나는 크게 음파를 스스로 내보내는 능동형 소나와 목표물이 내는 소리를 듣기만 하는 수동형 소나로 나뉜다.
3. 1. 능동 소나 (Active Sonar)
능동 소나는 음파 송신기(또는 프로젝터)와 수신기를 사용한다. 두 장치가 같은 위치에 있으면 단일 정지 방식으로 작동하고, 송신기와 수신기가 분리되어 있으면 이정지 방식으로 작동한다.[25] 여러 개의 송신기(또는 수신기)를 사용하고 공간적으로 분리하면 다정지 방식으로 작동한다. 대부분의 소나는 동일한 어레이를 송신과 수신에 모두 사용하는 단일 정지 방식으로 사용된다.[26] 능동 소노부이(sonobuoy)는 다정지 방식으로 작동될 수 있다.능동 소나는 "핑(ping)"이라고 부르는 음파 펄스를 생성한 다음, 펄스의 반사(메아리)를 수신한다. 이 음파 펄스는 일반적으로 신호 발생기, 전력 증폭기 및 전기 음향 변환기/어레이로 구성된 소나 프로젝터를 사용하여 전자적으로 생성된다.[27] 변환기는 음향 신호("핑")를 송신 및 수신할 수 있는 장치이다. 일반적으로 빔포머(beamformer)를 사용하여 음향 에너지를 빔으로 집중시키며, 이 빔은 필요한 검색 각도를 커버하도록 스캔될 수 있다. 때때로 음향 펄스는 폭약, 공기총 또는 플라즈마 음원과 같이 다른 방법으로 생성될 수 있다.
물체까지의 거리를 측정하려면 펄스 송신부터 수신까지의 시간을 측정하고 알려진 음속을 사용하여 거리로 변환한다.[28] 방위를 측정하려면 여러 개의 수중 청음기를 사용하며, 이 장치는 각 수중 청음기까지의 상대적인 도착 시간을 측정하거나, 빔포밍(beamforming)이라는 과정을 통해 형성된 빔에서 상대적인 진폭을 측정하여 어레이를 사용한다. 어레이를 사용하면 공간 응답이 감소하므로 넓은 영역을 커버하기 위해 다중빔 시스템이 사용된다.
펄스는 일정한 주파수 또는 변화하는 주파수의 차임(chirp)일 수 있다(수신 시 펄스 압축을 허용하기 위해). 특히 단일 주파수 전송을 사용하는 경우 도플러 효과를 사용하여 타겟의 방사 속도를 측정할 수 있다. 송신 신호와 수신 신호 사이의 주파수 차이를 측정하여 속도로 변환한다.
유용한 소형 소나 중 하나는 방수 손전등과 비슷하게 생겼다. 헤드를 물에 대고 버튼을 누르면 장치가 타겟까지의 거리를 표시한다. 또 다른 변형은 물고기 떼를 표시하는 작은 디스플레이를 가진 "어군 탐지기"이다.
능동 소나를 사용하여 변환기에서 바닥까지의 거리를 측정하는 경우 수심 측정이라고 한다.
능동 소나는 두 개의 소나 변환기 또는 수중 청음기(수중 음향 마이크)와 프로젝터(수중 음향 스피커)의 조합 사이의 물을 통한 거리를 측정하는 데에도 사용된다. 거리를 측정하기 위해 한 변환기/프로젝터가 질의 신호를 전송하고 이 전송과 다른 변환기/수중 청음기 응답의 수신 사이의 시간을 측정한다. 음속으로 스케일링하고 2로 나눈 시간 차이는 두 플랫폼 사이의 거리이다.
전투 상황에서 능동 펄스는 적에게 감지될 수 있으며, 잠수함이 접촉을 감지할 수 있는 최대 거리의 두 배 거리에서 잠수함의 위치를 드러내고, 나가는 핑의 특성에 따라 잠수함의 신원에 대한 단서를 제공한다. 이러한 이유로 능동 소나는 군사 잠수함에서 자주 사용되지 않는다.
매우 지향적이지만 효율이 낮은 소나(어업, 군사 및 항만 보안에 사용됨)는 비선형 소나로 알려진 물의 복잡한 비선형 특징을 활용하며, 가상 변환기는 ''매개변수 어레이''로 알려져 있다.
소나는 자신이 음파를 발하는 능동식과 목표가 발하는 음파를 포착하는 수동식으로 크게 나뉜다. 전파 영역의 레이더에 대응하는 장치이며, 반향정위를 이용하여 목표물의 정보를 얻는다.
1947년의 정의에서는 200헤르츠부터 5킬로헤르츠를 "저주파", 5부터 30킬로헤르츠를 "중주파", 15부터 100킬로헤르츠를 "고주파"로 했다. 잠수함을 수색 탐지하는 경우에는 원거리에서는 저주파, 근접 대잠전에서는 중주파가 적합하다고 여겨진다. 주파수가 낮을수록 원거리 전파에 유리하며, 수중 흡음재에 대한 대응이라는 면에서도 유리하지만, 반면에 잔향 등의 노이즈가 커지고, 분류도 어려워지며, 지향성이 둔해지기 때문에 방위 정밀도도 떨어지고, 송수파기도 커진다.
3. 2. 수동 소나 (Passive Sonar)
수동 소나(Passive Sonar)는 음파를 발신하지 않고, 목표물이 내는 소리만 듣고 정보를 얻는 기술이다. 잠수함이 항해할 때 엔진이나 프로펠러에서 발생하는 소음을 먼 거리에서 수신하여 표적의 종류를 식별하는 데 사용된다.[37] 마치 청진기로 뱃속 소리를 듣듯이, 수중에서 들려오는 모든 소리를 듣기만 한다.수동 소나는 군함, 상선, 어선 등을 구분할 수 있으며, 추진축과 스크류 날개의 개수, 침로와 속력까지 분석 가능하다.
수동 소나는 다양한 기술을 사용하여 탐지된 음원을 식별한다. 예를 들어, 미국 선박은 주로 60 헤르츠(Hz) 교류 전력 시스템을 사용하는데, 변압기나 발전기가 선체와 제대로 분리되지 않으면 60Hz 소음이 발생할 수 있다. 유럽 잠수함은 대부분 50Hz 전력 시스템을 사용하므로, 이러한 소리 차이를 통해 국가를 식별할 수 있다.
렌치를 떨어뜨리는 소리와 같은 간헐적인 소리, 즉 "과도 현상"도 수동 소나로 탐지할 수 있다. 과거에는 숙련된 운영자가 수동으로 신호를 식별했지만, 최근에는 컴퓨터가 이 작업을 수행한다.
수동 소나 시스템은 방대한 음향 데이터베이스를 보유하고 있으며, 이를 통해 선박의 종류, 행동(속도, 무기 종류 등), 심지어 특정 선박까지 식별할 수 있다.
수동 소나를 사용하는 잠수함은 자체 소음을 최소화하기 위해 무소음 대류를 사용하는 원자로, 연료 전지, 배터리 등을 사용한다. 프로펠러 역시 소음을 줄이기 위해 정밀하게 설계 및 가공된다.
소나 수중 청음기는 선박이나 잠수함 자체 소음의 영향을 줄이기 위해 선체 뒤에 예인되기도 한다. 예인 장치는 수온 약층의 영향을 줄이는 데도 도움이 된다.
대부분의 수동 소나 디스플레이는 2차원 워터폴 디스플레이를 사용했다. 수평 방향은 방위각, 수직 방향은 주파수 또는 시간을 나타낸다. 최근에는 레이더와 유사한 평면 위치 표시기 디스플레이를 사용하기도 한다.
수동 소나의 종류는 다음과 같다.
- 선측배열소나 (Flank Array Sonar): 잠수함 좌우현에 장착된 2개의 긴 수동 어레이를 통해 저주파 음향을 탐지한다.
- 방수소나 (Intercept Sonar): 대잠함이 발신하는 소나 음파를 차단 및 분석하여 소나 유형 및 탑재 함정을 파악한다.
- 측거소나 (Passive Ranging Sonar): 잠수함 현측에 배열된 3개의 수동 어레이를 통해 음향의 시간차를 이용하여 표적 거리를 측정한다.
- 예인소나 (Towed Array Sonar): 잠수함 자체 소음의 방해를 받지 않도록 Passive Array를 예인하는 저주파 소나이다. 주로 조용한 잠수함 탐지에 유용하며, 대형 잠수함은 함내로 감아들이는 방식을 사용한다.
일본 제국 해군에서는 수신 전용 수중청음기(ハイドロフォン)만을 송수신기로 사용하는 시스템을 수중청음기라고 불렀다.
4. 구성 및 작동 원리
능동 소나는 소리 송신기와 수신기를 모두 사용한다. 송신부와 수신부가 함께 있으면 일원 체계, 분리되어 있으면 이원 체계라고 한다. 여러 개의 송신기나 수신기를 사용하는 경우는 다원 체계라고 부른다.[102] 대부분의 소나는 송신과 수신에 같은 장치를 쓰는 일원 체계를 사용한다.[26]
능동 소나는 "핑(ping)"이라고 하는 음파를 발생시킨 후, 이 음파가 물체에 부딪혀 돌아오는 메아리를 듣는다. 보통 소나 프로젝터를 사용하여 전자적으로 음파를 만든다.[27] 소나 프로젝터는 신호 발생기, 전력 증폭기, 전기 음향 변환기/어레이 등으로 구성된다. 변환기는 음향 신호("핑")를 보내고 받는 장치이다. 빔포머(beamformer)를 사용하면 음향 에너지를 빔 형태로 모을 수 있고, 이 빔을 움직여 원하는 곳을 탐색할 수 있다. 전기 음향 변환기는 톤필츠(Tonpilz)형을 주로 사용하며, 넓은 주파수 범위에서 효율을 높이도록 설계된다. 폭약, 공기총, 플라즈마 음원 등으로 음파를 만들기도 한다.
물체까지의 거리는 펄스를 보내고 받는 시간을 재고, 알려진 음속을 곱해서 계산한다.[28] 방위는 여러 개의 수중 청음기를 사용하여 각 청음기에 소리가 도착하는 시간 차이를 재거나, 빔포밍(beamforming)으로 만들어진 빔의 상대적인 세기를 측정하여 구한다. 넓은 곳을 탐색하기 위해 다중빔 시스템을 사용하기도 한다.
수신된 신호는 신호 처리를 거쳐 표적 신호와 잡음을 구별한다.[29] 간단한 소나는 에너지 측정만 하지만, 복잡한 소나는 소프트웨어를 통해 표적을 구분하고, 위치와 속도를 알아내는 추가 처리를 한다. 펄스는 일정한 주파수를 가지거나, 변화하는 주파수의 차임(chirp) 형태일 수 있다. 간단한 소나는 넓은 필터를 써서 도플러 변화를 감지하고, 복잡한 소나는 펄스 압축 기술을 쓴다. 디지털 처리 기술이 발전하면서 펄스 압축은 디지털 상관 기술로 구현된다. 군용 소나는 여러 개의 빔을 사용해 모든 방향을 탐색하지만, 간단한 소나는 좁은 곳만 탐색하고 기계적 스캔으로 빔을 회전시킨다.
단일 주파수를 사용하는 경우, 도플러 효과를 이용해 표적의 속도를 잴 수 있다. 송신 신호와 수신 신호의 주파수 차이를 재서 속도로 바꾼다. 수신기나 표적이 움직여서 도플러 편이가 생길 수 있으므로, 탐색하는 배의 속도도 고려해야 한다.
작은 소나 중에는 방수 손전등처럼 생긴 것도 있다. 헤드를 물에 대고 버튼을 누르면 거리가 표시된다. 어군 탐지기처럼 물고기 떼를 보여주는 소나도 있다. 일부 민간용 소나는 군사용 소나와 비슷한 성능을 내며, 배 주변을 3차원 그림으로 보여주기도 한다.
능동 소나로 변환기에서 바닥까지의 거리를 재는 것을 수심 측정이라고 한다. 위쪽으로 같은 방법을 쓰면 파도 높이를 잴 수 있다.
능동 소나는 두 소나 변환기나 수중 청음기와 프로젝터 사이의 거리를 재는 데도 쓰인다. 한 변환기/프로젝터가 신호를 보내면, 다른 변환기/수중 청음기가 응답 신호를 보낸다. 두 신호 사이의 시간을 음속으로 계산하고 2로 나누면 거리가 된다. 이 방법은 여러 변환기/수중 청음기/프로젝터를 써서 물속 물체의 상대 위치를 계산하는 데 쓰인다.
전투 상황에서 능동 펄스는 적에게 탐지될 수 있다. 잠수함의 위치와 정보를 노출시킬 수 있기 때문에 능동 소나는 군용 잠수함에서 자주 쓰이지 않는다.
어업, 군사, 항만 보안에 쓰이는 지향성이 높지만 효율이 낮은 소나는 물의 비선형 특징을 활용하는 비선형 소나이며, 가상 변환기는 ''매개변수 어레이''라고 한다.
수동 소나는 신호를 보내지 않고 받기만 한다.[37] 멀리 떨어진 물체가 발생시키는 소리를 분석하여 그 물체에 대한 정보를 얻는다. 소나 시스템에서는 습식부(웻 엔드)에서 포착한 음향 신호를 컴퓨터 등으로 적절히 처리해야 비로소 음향 정보가 된다.
음향 에너지와 전기 에너지를 상호 변환하는 장치를 '''송수파기'''(트랜스듀서)라고 한다. 전기 에너지를 음향 에너지로 변환하는 것은 송파기(프로젝터), 음향 에너지를 전기 에너지로 변환하는 것은 수파기(하이드로폰)이다. 이들은 소나 시스템의 최전선에 위치하여 "웻 엔드(wet end)"라고도 불린다. 이러한 변환은 자기변형 또는 압전 효과(전왜 효과 포함)를 통해 이루어진다.
실용적인 소나는 다수의 소자를 배열한 어레이를 사용한다. 어레이를 통해 빔포밍을 하면 감도가 향상되고, 음파의 방향을 알 수 있으며, 수파기의 SN비가 개선된다.
능동 소나에서는 수신 신호에서 에코 신호를 검출하기 위해 상관 신호 처리를 사용한다. 대표적인 신호 파형 방식은 일정 주파수 연속파와 직선형 주파수 변조이다. 수신 형식으로는 스캐닝 수신, 대기 수신, 분할 빔 수신등이 있다. 패시브 소나의 음향 신호 처리 기본은 신호의 스펙트럼 분석에 의한 주파수 정보와 방위 정보의 추출이다.
4. 1. 송신 및 수신
능동 소나는 음파 송신기와 수신기를 모두 사용하여 작동한다. 송신기와 수신기가 함께 있는 경우를 일원 체계, 분리되어 있는 경우를 이원 체계라고 한다. 여러 개의 송신기나 수신기를 사용하는 경우는 다원 체계라고 부른다.[102] 대부분의 소나는 송신과 수신에 동일한 장치를 사용하는 일원 체계를 사용한다.[26]능동 소나는 "핑(ping)"이라고 하는 음파 펄스를 발생시킨 후, 그 펄스가 물체에 부딪혀 돌아오는 메아리를 수신한다. 일반적으로 소나 프로젝터를 사용하여 전자적으로 음파 펄스를 생성한다.[27] 소나 프로젝터는 신호 발생기, 전력 증폭기, 전기 음향 변환기/어레이 등으로 구성된다. 변환기는 음향 신호("핑")를 보내고 받는 장치이다. 빔포머(beamformer)는 음향 에너지를 빔 형태로 집중시키고, 이 빔을 스캔하여 원하는 영역을 탐색할 수 있다. 전기 음향 변환기는 주로 톤필츠(Tonpilz)형을 사용하며, 넓은 대역폭에서 최대 효율을 내도록 설계된다. 폭약, 공기총, 플라즈마 음원 등을 사용하여 음향 펄스를 생성하는 경우도 있다.
물체까지의 거리는 펄스를 보내고 받는 데 걸리는 시간을 측정하고, 알려진 음속을 이용하여 계산한다.[28] 방위는 여러 개의 수중 청음기를 사용하여 각 청음기에 도달하는 시간 차이를 측정하거나, 빔포밍(beamforming)을 통해 형성된 빔의 상대적인 진폭을 측정하여 구한다. 넓은 영역을 탐색하기 위해 다중빔 시스템이 사용된다. 수신된 신호는 신호 처리를 거쳐 표적 신호와 소음을 구분한다.[29] 간단한 소나는 에너지 측정만 하지만, 정교한 소나는 소프트웨어를 통해 표적을 분류하고, 위치와 속도를 측정하는 추가적인 처리를 수행한다.
펄스는 일정한 주파수를 가지거나, 변화하는 주파수의 차임(chirp) 형태일 수 있다. 간단한 소나는 넓은 필터를 사용하여 도플러 변화를 감지하고, 복잡한 소나는 펄스 압축 기술을 사용한다. 디지털 처리 기술의 발달로 펄스 압축은 디지털 상관 기술을 통해 구현된다. 군용 소나는 여러 개의 빔을 사용하여 전방위를 탐색하는 반면, 간단한 소나는 좁은 영역만 탐색하지만 기계적 스캔을 통해 빔을 회전시킬 수 있다.
단일 주파수 전송을 사용하는 경우, 도플러 효과를 이용하여 표적의 속도를 측정할 수 있다. 송신 신호와 수신 신호의 주파수 차이를 측정하여 속도로 변환한다. 수신기나 표적의 움직임으로 인해 도플러 편이가 발생할 수 있으므로, 탐색 플랫폼의 속도를 고려해야 한다.
소형 소나 중에는 방수 손전등과 유사한 형태도 있다. 헤드를 물에 대고 버튼을 누르면 거리가 표시된다. 어군 탐지기와 같이 물고기 떼를 표시하는 디스플레이가 있는 소나도 있다. 일부 민간 소나는 능동 군사 소나와 비슷한 성능을 가지며, 보트 주변 영역을 3차원 이미지로 보여주기도 한다.
능동 소나를 사용하여 변환기에서 해저까지의 거리를 측정하는 것을 수심 측정이라고 한다. 위쪽을 향해 같은 방법을 사용하면 파도 높이를 측정할 수 있다.
능동 소나는 두 소나 변환기 또는 수중 청음기와 프로젝터 사이의 거리를 측정하는 데에도 사용된다. 한 변환기/프로젝터가 질문 신호를 보내면, 다른 변환기/수중 청음기가 특정 응답 신호를 보낸다. 두 신호 사이의 시간 차이를 음속으로 계산하고 2로 나누면 거리가 된다. 이 기술은 여러 변환기/수중 청음기/프로젝터를 사용하여 물속 물체의 상대적 위치를 계산하는 데 사용될 수 있다.
전투 상황에서 능동 펄스는 적에게 탐지될 수 있으며, 잠수함의 위치와 정보를 노출시킬 수 있다. 따라서 능동 소나는 군사 잠수함에서 자주 사용되지 않는다.
어업, 군사 및 항만 보안에 사용되는 매우 지향적이지만 효율이 낮은 소나는 물의 비선형 특징을 활용하는 비선형 소나이며, 가상 변환기는 ''매개변수 어레이''로 알려져 있다.
수동 소나(Passive sonar)는 신호를 보내지 않고 받기만 한다.[37] 군사 및 과학 분야에서 사용되며, 예를 들어 다양한 수생 환경에서 어류의 존재를 확인하는 데 사용된다.
음향 에너지와 전기 에너지를 상호 변환하는 장치를 '''송수파기'''(트랜스듀서)라고 한다. 전기 에너지를 음향 에너지로 변환하는 것은 송파기(프로젝터), 음향 에너지를 전기 에너지로 변환하는 것은 수파기(하이드로폰)이다. 이들은 소나 시스템의 최전선에 위치하여 "웻 엔드(wet end)"라고도 불린다.
이러한 변환은 자기변형 또는 압전 효과(전왜 효과 포함)를 통해 이루어진다. 석영(수정 진동자), 인산암모늄, 로셸염 등의 압전소자는 압력을 가하면 전하를 유도하고, 전압을 가하면 압력을 발생시킨다. 전왜 소자는 티탄산바륨이나 티탄산지르콘산납 등을 사용하며, 고전계를 가해 분극시켜야 한다.
실용적인 소나는 다수의 소자를 배열한 어레이를 사용한다. 어레이를 통해 빔포밍을 하면 감도가 향상되고, 음파의 방향을 알 수 있으며, 수파기의 SN비가 개선된다. 빔포밍 시 지향성이득(어레이 게인)을 높이려면 어레이는 대상 음파 파장의 수 배 길이를 확보해야 한다. 따라서 낮은 주파수를 대상으로 할수록 어레이 길이와 수파 면적이 커진다. 빔포밍을 위해서는 대상 음파 파장의 절반 이하 간격으로 하이드로폰을 배치해야 한다.
소나 시스템은 웻 엔드에서 얻은 음향 신호를 컴퓨터 등으로 처리하여 음향 정보를 생성한다. 이러한 처리 시스템은 함선 내부에 위치하며 "드라이 엔드(dry end)"라고 불린다.
능동 소나에서는 수신 신호에서 에코 신호를 검출하기 위해 상관 신호 처리를 사용한다. 대표적인 신호 파형 방식은 다음과 같다.
- 일정 주파수 연속파 (Pulse Continuous Wave, PCW): 일정 주파수의 연속파를 펄스 변조한 것.
- 직선형 주파수 변조 (Linear Frequency Modulation, LFM): 주파수가 시간에 따라 직선적으로 변하는 주파수 변조파를 펄스 변조한 것.
이 외에도 PRN(pseudorandom noise), SFM(Stepped frequency modulation) 등 복잡한 파형이 있다. SFM에 PDPC 처리를 조합한 SFM-PDPC(Post detection pulse compression)는 신호대잡음비 개선 방법으로 연구되고 있다.
송파기・수파기를 어레이로 배열하면 지향성을 갖게 된다. 음향빔을 형성하는 것을 빔포밍(beamforming)이라고 한다.
빔포밍은 어레이 배열, 위상 정합, 쉐이딩 등에 의해 결정된다. 빔 형성을 통해 얻어지는 하이드로폰 어레이의 SN비 향상은 지향성이득(어레이 게인)으로 평가된다. 예인소나와 같은 직선형 어레이는 어레이 길이가 길수록, 탐신기 등에서 사용되는 원통형/구형 어레이는 수파 면적이 클수록 어레이 게인이 향상된다.
송신 형식은 다음과 같다.
- 전방향 송신 (Omnidirectional transmission|전방향 송신영어): 전방향 송신.
- 순차 방향 송신 (Rotating Directional Transmission|순차 방향 송신영어): 음향 빔을 회전시키거나 방향을 바꾸면서 송신.
- 삼중 순차 방향 송신 (Triple Rotating Directional Transmission|삼중 순차 방향 송신영어): 3개의 빔을 생성하여 120도 간격으로 회전.
- SDT(Steering Directional Transmission): 음향 빔을 특정 방향으로 송신.
수신 형식은 다음과 같다.
- 스캐닝 수신 (scanning reception): 단일 수신 빔을 스캔하며 수신.
- 대기 수신 (preformed beam reception): 미리 형성된 여러 방향의 수신 빔 (preformed beam)으로 동시 수신.
- 분할 빔 수신 (split beam reception; 쌍빔 수신): 특정 방향에 대해 음향 중심 위치가 다른 두 개의 수신 빔을 구성. 도달 시간차를 위상차로 검출하여 방향 특정.
적응 빔포밍(adaptive beamforming, ABF)과 같은 새로운 방식도 등장하고 있다.
패시브 소나의 음향 신호 처리는 신호의 스펙트럼 분석을 통해 주파수 정보와 방위 정보를 추출한다. 스펙트럼 분석에는 고속 푸리에 변환(FFT)이나 최대 엔트로피법(MEM)이 사용된다.
4. 2. 신호 처리
능동 소나는 음파 송신기(또는 프로젝터)와 수신기를 사용한다. 대부분의 소나는 동일한 어레이를 송신과 수신에 모두 사용하는 단일 정지 방식으로 작동한다.[26] 능동 소나는 "핑(ping)"이라고 부르는 음파 펄스를 생성한 다음, 펄스의 반사(메아리)를 수신한다. 음향 신호("핑")를 송신 및 수신할 수 있는 장치를 변환기라고 한다.
물체까지의 거리를 측정하려면 펄스 송신부터 수신까지의 시간을 측정하고 알려진 음속을 사용하여 거리로 변환한다.[28] 방위를 측정하려면 여러 개의 수중 청음기를 사용하며, 각 수중 청음기까지의 상대적인 도착 시간을 측정하거나, 빔포밍(beamforming)이라는 과정을 통해 형성된 빔에서 상대적인 진폭을 측정하여 어레이를 사용한다. 타겟 신호(있는 경우)와 노이즈는 다양한 형태의 신호 처리를 거친다.[29]
특히 단일 주파수 전송을 사용하는 경우 도플러 효과를 사용하여 타겟의 방사 속도를 측정할 수 있다. 송신 신호와 수신 신호 사이의 주파수 차이를 측정하여 속도로 변환한다.
능동 소나를 사용하여 변환기에서 바닥까지의 거리를 측정하는 경우 수심 측정이라고 한다.
전투 상황에서 능동 펄스는 적에게 감지될 수 있으며, 잠수함이 접촉을 감지할 수 있는 최대 거리의 두 배 거리에서 잠수함의 위치를 드러내고, 나가는 핑의 특성에 따라 잠수함의 신원에 대한 단서를 제공한다. 이러한 이유로 능동 소나는 군사 잠수함에서 자주 사용되지 않는다.
수동 소나는 신호를 송신하지 않고 수신만 한다.[37] 멀리 떨어진 물체가 발생시키는 소리를 분석하여 그 물체에 대한 정보를 얻는 기술 또는 장치이다.
소나 시스템에서는 습식부(웻 엔드)에서 포착한 음향 신호를 컴퓨터 등으로 적절히 처리해야 비로소 음향 정보가 된다. 능동 소나에서는 일반적으로 수신 신호에서 에코 신호를 검출하는 방법으로 상관 신호 처리가 사용된다. 사용되는 신호 파형으로는 다음 두 방식이 대표적이다.[30]
- 일정 주파수 연속파 (Pulse Continuous Wave, PCW): 일정 주파수의 연속파를 펄스 변조한 것.
- 직선형 주파수 변조 (Linear Frequency Modulation, LFM): 주파수가 시간에 따라 직선적으로 변화하는 주파수 변조파를 펄스 변조한 것.
수신 형식으로는 다음과 같은 모드가 있다.
- 스캐닝 수신 (scanning reception): 단일 수신 음향 빔을 스캔하면서 수신하는 방식이다.
- 대기 수신 (preformed beam reception): 미리 형성된 여러 방향의 수신 음향 빔 (preformed beam)으로 동시에 수신하는 방식이다.
- 분할 빔 수신 (split beam reception; 쌍빔 수신): 특정 방향에 대해 음향 중심 위치가 다른 두 개의 수신 음향 빔을 구성하는 방식이다.
패시브 소나의 음향 신호 처리 기본은 신호의 스펙트럼 분석에 의한 주파수 정보와 방위 정보의 추출이다. 스펙트럼 분석에는 고속 푸리에 변환(FFT)이나 최대 엔트로피법(MEM)이 사용된다.
5. 성능 예측 및 요인
소나의 탐지, 분류 및 위치 확인 성능은 환경, 수신 장비, 그리고 능동 소나의 경우 송신 장비, 수동 소나의 경우 표적의 방사 잡음에 의존한다.
수동 소나는 탐지된 음원을 식별하기 위해 다양한 기술을 사용한다. 예를 들어, 미국 선박은 주로 60 헤르츠(Hz) 교류 전력 시스템을 사용한다. 변압기나 발전기가 선체로부터 적절한 진동 차단 없이 장착되거나 침수될 경우, 권선에서 발생하는 60 Hz 소리가 잠수함이나 선박에서 방출될 수 있다. 이는 유럽 잠수함이나 다른 국가의 잠수함이 50 Hz 전력 시스템을 사용하기 때문에 국가를 식별하는 데 도움이 될 수 있다. 렌치를 떨어뜨리는 것과 같은 간헐적인 음원("과도 현상")도 수동 소나로 탐지될 수 있다. 과거에는 숙련된 운영자가 신호를 식별했지만, 최근에는 컴퓨터가 이 작업을 수행한다.
수동 소나 시스템은 방대한 음향 데이터베이스를 보유할 수 있지만, 소나 운영자는 일반적으로 신호를 수동으로 분류한다. 컴퓨터 시스템은 이러한 데이터베이스를 사용하여 선박의 종류, 행동(선박의 속도, 발사된 무기의 종류, 가장 효과적인 대응책), 심지어 특정 선박까지 식별하는 데 자주 사용된다.
5. 1. 소나 방정식 (Sonar Equation)
소나에서의 탐지, 판별, 지역화 성능은 환경과 수신 장비에 주로 의존한다. 소나 장치와 표적과의 관계는 소나 방정식으로 표현된다.고전적인 모노스태틱 방식(송파기와 수파기가 동일한 장소에 있는 것)의 능동 소나 방정식은 다음과 같다.[25][26][27][28][29]
- 배경 잡음형:
: SL - 2TL + TS = NL - DI + DT
- 배경 잔향형:
: SL - 2TL + TS = RL + DTr
수동 소나 방정식은 다음과 같다.[38][33]
: SL - TL = NL - DI + DTn
각 항목은 다음과 같다.
| 항목 | 설명 |
|---|---|
| DT | 탐지 임계값(한계) |
| SL | 음원의 송파 레벨 |
| TL | 해중의 전파 손실 |
| TS | 표적의 표적 강도(Target Strength) |
| NL | 잡음 레벨 |
| RL | 잔향 레벨 |
| DI (AG) | 지향성 이득(배열 이득) |
5. 2. 해양 음향 환경
소나의 탐지, 판별, 위치 추정 성능은 환경과 수신 장비에 크게 의존한다.
음파탐지기 작동은 특히 수직면에서의 음속 변화에 영향을 받는다. 음파는 담수에서보다 해수에서 더 빠르게 전파되지만, 그 차이는 미미하다. 음속은 물의 체적 탄성률과 질량 밀도에 의해 결정된다. 체적 탄성률은 온도, 용존 불순물(일반적으로 염분), 그리고 압력의 영향을 받는다. 밀도 효과는 미미하다.
경험적으로 유도된 근사 방정식은 일반적인 온도, 염분 농도 및 대부분의 해양 수심 범위에 대해 상당히 정확하며, 공식은 다음과 같다.
:4388 + (11.25 × 온도(°F)) + (0.0182 × 수심(피트)) + 염분(천분율)
해양 온도는 수심에 따라 변하지만, 30~100미터 사이에는 종종 뚜렷한 변화가 있는데, 이를 수온약층이라고 하며, 따뜻한 표층수와 나머지 해양을 구성하는 차가운 정체수를 구분한다. 이는 수온약층의 한쪽에서 발생하는 음파가 수온약층을 통해 굴절되기 때문에 음파탐지기에 문제를 일으킬 수 있다. 수온약층은 더 얕은 연안 해역에서도 존재할 수 있다. 그러나 파도 작용은 종종 수주를 혼합하여 수온약층을 제거한다. 물의 압력 또한 음파 전파에 영향을 미친다. 압력이 높을수록 음속이 증가하여 음파가 더 높은 음속 영역에서 멀어지는 방향으로 굴절된다. 굴절의 수학적 모델은 스넬의 법칙이다.
음원이 깊고 조건이 적절하면 '심해 음향 채널'에서 전파가 발생할 수 있다. 이는 채널 내 수신기로의 전파 손실을 극도로 낮게 한다. 이는 경계에서 손실이 없는 채널 내 음파 포획 때문이다. 유사한 전파는 적절한 조건 하에서 '표면 도파관'에서 발생할 수 있다. 그러나 이 경우 표면에서 반사 손실이 발생한다.
천해에서는 일반적으로 표면과 바닥에서 반복적인 반사를 통해 전파가 이루어지며, 상당한 손실이 발생할 수 있다.
음파 전파는 물 자체뿐만 아니라 표면과 바닥에서의 흡수의 영향을 받는다. 이 흡수는 해수에서 여러 가지 다른 메커니즘을 가지고 주파수에 따라 달라진다. 장거리 음파탐지는 흡수 효과를 최소화하기 위해 저주파를 사용한다.
바다는 원하는 표적 에코 또는 신호를 방해하는 많은 소음원을 포함하고 있다. 주요 소음원은 파도와 선박이다. 물을 통한 수신기의 움직임은 속도에 따라 저주파 소음을 발생시킬 수도 있다.
깊이에 따라 음속이 변화할 때, 수중에서 음속의 최소값을 갖는 영역을 사운드 채널(sound channel)이라고 한다. 이는 음선(소리의 전파 경로)에 대해 일종의 렌즈처럼 작용하기 때문에, 굴절에 의해 수직 방향으로 발산되지 않고 장거리 전파가 용이해지는 특징이 있다.
5. 3. 표적 특성
능동 소나는 음파 송신기(프로젝터)와 수신기를 사용한다. 송신기와 수신기가 같은 위치에 있으면 단일 정지 방식으로 작동하고, 분리되어 있으면 이정지 방식으로 작동한다.[25] 여러 개의 송신기나 수신기를 사용하고 공간적으로 분리하면 다정지 방식으로 작동한다. 대부분의 소나는 동일한 어레이를 송신과 수신에 모두 사용하는 단일 정지 방식이다.[26] 능동 소노부이(sonobuoy)는 다정지 방식으로 작동될 수 있다.
능동 소나는 "핑(ping)"이라고 부르는 음파 펄스를 생성한 다음, 펄스의 반사(메아리)를 수신한다. 음파 펄스는 소나 프로젝터를 사용하여 전자적으로 생성된다.[27] 변환기는 음향 신호("핑")를 송신 및 수신할 수 있는 장치이다. 빔포머(beamformer)를 사용하여 음향 에너지를 빔으로 집중시키며, 이 빔은 필요한 검색 각도를 커버하도록 스캔될 수 있다. 전기 음향 변환기는 톤필츠(Tonpilz)형이며, 넓은 대역폭에서 최대 효율을 달성하도록 설계될 수 있다. 때때로 음향 펄스는 폭약, 공기총 또는 플라즈마 음원과 같이 다른 방법으로 생성될 수 있다.
물체까지의 거리를 측정하려면 펄스 송신부터 수신까지의 시간을 측정하고 알려진 음속을 사용하여 거리로 변환한다.[28] 방위를 측정하려면 여러 개의 수중 청음기를 사용하며, 각 수중 청음기까지의 상대적인 도착 시간을 측정하거나, 빔포밍(beamforming)이라는 과정을 통해 형성된 빔에서 상대적인 진폭을 측정하여 어레이를 사용한다. 넓은 영역을 커버하기 위해 다중빔 시스템이 사용된다. 타겟 신호와 노이즈는 다양한 형태의 신호 처리를 거친다.[29] 간단한 소나의 경우 에너지 측정만 할 수 있다. 그런 다음 출력을 필요한 신호 또는 노이즈로 부르는 일종의 의사 결정 장치에 표시된다. 이 의사 결정 장치는 헤드폰이나 디스플레이를 사용하는 운영자일 수도 있고, 더 정교한 소나의 경우 소프트웨어가 이 기능을 수행할 수 있다. 타겟을 분류하고 위치를 파악하며 속도를 측정하기 위해 추가적인 처리가 수행될 수 있다.
펄스는 일정한 주파수 또는 변화하는 주파수의 차임(chirp)일 수 있다(수신 시 펄스 압축을 허용하기 위해). 간단한 소나는 타겟 이동으로 인한 도플러 변화를 커버할 수 있을 만큼 넓은 필터를 사용하는 전자를 사용하는 반면, 더 복잡한 소나는 후자 기술을 포함한다. 디지털 처리가 가능해짐에 따라 펄스 압축은 디지털 상관 기술을 사용하여 구현되었다. 군용 소나는 전방위 커버를 제공하기 위해 여러 개의 빔을 가지고 있는 반면, 간단한 소나는 좁은 호만 커버하지만, 빔은 상대적으로 느리게 기계적 스캔으로 회전할 수 있다.
특히 단일 주파수 전송을 사용하는 경우 도플러 효과를 사용하여 타겟의 방사 속도를 측정할 수 있다. 송신 신호와 수신 신호 사이의 주파수 차이를 측정하여 속도로 변환한다. 도플러 편이는 수신기 또는 타겟의 움직임으로 인해 발생할 수 있으므로 검색 플랫폼의 방사 속도를 고려해야 한다.
유용한 소형 소나 중 하나는 방수 손전등과 비슷하게 생겼다. 헤드를 물에 대고 버튼을 누르면 장치가 타겟까지의 거리를 표시한다. 또 다른 변형은 물고기 떼를 표시하는 작은 디스플레이를 가진 "어군 탐지기"이다. 일부 민간 소나는 능동 군사 소나에 근접하는 성능을 가지고 있으며, 보트 근처 영역의 3차원 디스플레이를 제공한다.
능동 소나를 사용하여 변환기에서 바닥까지의 거리를 측정하는 경우 수심 측정이라고 한다. 파고 측정을 위해 위쪽을 향해 비슷한 방법을 사용할 수 있다.
능동 소나는 두 개의 소나 변환기 또는 수중 청음기와 프로젝터 사이의 물을 통한 거리를 측정하는 데에도 사용된다. 수중 청음기/변환기가 특정 질의 신호를 수신하면 특정 응답 신호를 전송하여 응답한다. 거리를 측정하기 위해 한 변환기/프로젝터가 질의 신호를 전송하고 이 전송과 다른 변환기/수중 청음기 응답의 수신 사이의 시간을 측정한다. 음속으로 스케일링하고 2로 나눈 시간 차이는 두 플랫폼 사이의 거리이다. 여러 변환기/수중 청음기/프로젝터를 사용할 때 이 기술은 물 속에 있는 정적 및 이동 객체의 상대적 위치를 계산할 수 있다.
전투 상황에서 능동 펄스는 적에게 감지될 수 있으며, 잠수함이 접촉을 감지할 수 있는 최대 거리의 두 배 거리에서 잠수함의 위치를 드러내고, 나가는 핑의 특성에 따라 잠수함의 신원에 대한 단서를 제공한다. 이러한 이유로 능동 소나는 군사 잠수함에서 자주 사용되지 않는다.
매우 지향적이지만 효율이 낮은 소나는 물의 비선형 특징을 활용하며, 가상 변환기는 ''매개변수 어레이''로 알려져 있다.
수동 소나는 신호를 송신하지 않고 수신만 한다.[37] 군사 목적으로 자주 사용되지만, 과학 분야에서도 사용된다. 수동 음향학 및 수동 레이더도 참조. 원격으로 생성된 소리를 포함하는 거의 모든 분석 기술을 포함할 수 있지만, 일반적으로 수생 환경에 적용되는 기술로 제한된다.
수동 소나는 탐지된 음원을 식별하기 위한 다양한 기술을 사용한다. 예를 들어, 미국 선박은 60 헤르츠(Hz) 교류 전력 시스템을 사용한다. 변압기 또는 발전기가 선체로부터 적절한 진동 차단 없이 장착되거나 침수될 경우, 권선에서 발생하는 60 Hz 소리가 잠수함이나 선박에서 방출될 수 있다. 이는 모든 유럽 잠수함과 거의 모든 다른 국가의 잠수함이 50 Hz 전력 시스템을 사용하기 때문에 그 국가를 식별하는 데 도움이 될 수 있다. 렌치를 떨어뜨리는 것과 같은 간헐적인 음원, 즉 "과도 현상"도 수동 소나로 탐지될 수 있다. 최근까지 숙련된 운영자가 신호를 식별했지만, 이제는 컴퓨터가 이 작업을 수행할 수 있다.
수동 소나 시스템은 방대한 음향 데이터베이스를 보유하고 있을 수 있지만, 소나 운영자는 일반적으로 최종적으로 수동으로 신호를 분류한다. 컴퓨터 시스템은 이러한 데이터베이스를 사용하여 선박의 종류, 행동(선박의 속도 또는 발사된 무기의 종류 및 가장 효과적인 대응책) 심지어 특정 선박까지 식별하는 데 자주 사용된다.
소나의 탐지, 분류 및 위치 확인 성능은 환경과 수신 장비뿐만 아니라 능동 소나의 경우 송신 장비, 수동 소나의 경우 표적의 방사 잡음에도 의존한다.
능동 소나를 사용할 때, 해저 및 수면뿐만 아니라 바다의 작은 물체에서도 산란이 발생한다. 이는 주요 간섭원이 될 수 있다. 능동 소나는 산란을 최소화하기 위해 좁은 빔으로 송신해야 한다.

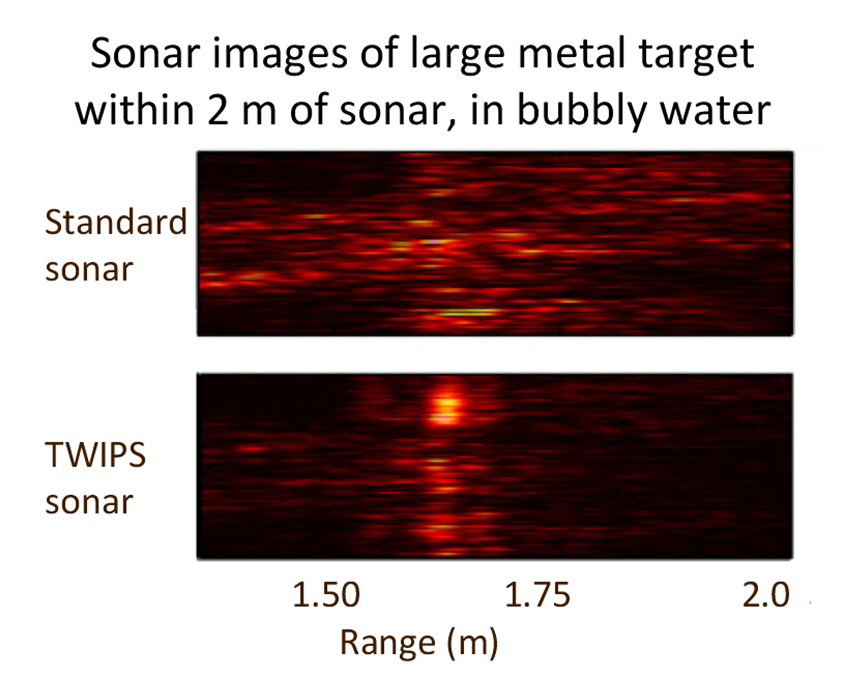
물체로부터의 소나 산란은 능동 소나가 이들을 탐지하는 방법이지만, 이 기능은 잘못된 표적 또는 '잡음'으로 인한 강한 산란에 의해 가려질 수 있다. 파도가 부서지는 곳([40]), 선박의 흔적, 해저에서 나오는 가스 방출([41]) 등에서 발생하는 기포는 강력한 잡음원이며 표적을 쉽게 숨길 수 있다. TWIPS(Twin Inverted Pulse Sonar)[42][43][44]는 현재 이러한 잡음 문제를 극복할 수 있는 유일한 소나이다.
능동 소나 표적의 음파 반사 특성은 표적강도로 알려져 있다. 고래, 항적, 어군, 암석과 같은 바다의 다른 물체에서도 반향이 감지된다.
수동 소나는 표적의 방사 소음 특성을 감지한다. 방사된 스펙트럼은 특정 주파수에서 피크를 보이는 연속 스펙트럼의 소음으로 구성되며, 이는 분류에 사용될 수 있다.
공격받는 함선은 소음 수준을 높이고, 큰 가짜 표적을 제공하며, 함선 자체의 신호를 가리기 위해 ''능동적''(전력 사용) 대응책을 발사할 수 있다.
''수동적''(비전력) 대응책에는 다음이 포함된다.
- 격리 장치에 소음 발생 장치 장착
- 무반향 타일과 같은 잠수함 선체의 소음 흡수 코팅
6. 응용 분야
능동 소나는 다양한 분야에서 활용된다.
- 어군 탐지: 어선에서 물고기 떼를 탐지하는 데 사용된다. 어군 탐지기는 물고기의 부레에서 반사되는 음파를 이용하여 어군의 위치, 크기, 밀도 등을 파악한다.

- 수심 측정: 선박에서 해저까지의 깊이를 측정하는 데 사용된다. 수심 측정기는 음파를 해저로 발사하고 반사되어 돌아오는 시간을 측정하여 수심을 계산한다.[53]
- 해저 지형 탐사: 측면 주사 음파탐지기를 사용하여 해저 지형을 이미지화한다. 이는 해저 자원 탐사, 해저 케이블 설치, 침몰선 탐색 등에 활용된다.
- 해저 자원 탐사: 강력한 저주파 에코 사운더가 해저 상층부의 단면도를 제공하기 위해 개발되었다.
- 수중 항법: 원격조종 무인잠수정(ROV) 및 무인잠수정(UUV)에 장착되어 수중에서 장애물을 탐지하고 안전하게 항해하는 데 사용된다.
- 해양 생물 연구: 능동 소나 기술을 이용하여 어류 및 기타 해양 생물의 위치, 크기, 행동 등을 연구한다.
- 수중 속도 측정: 특수한 단거리 음파 탐지기가 개발되어 수중 속도 측정에 사용된다.
- 해저 분류: 해저를 진흙, 모래, 자갈 등으로 특징짓는 데 사용할 수 있는 음파 탐지기가 개발되었다.
- 파고 측정: 바닥이나 플랫폼에 장착된 수직 상향식 음향 측심기는 파고와 주기를 측정하는 데 사용될 수 있다.
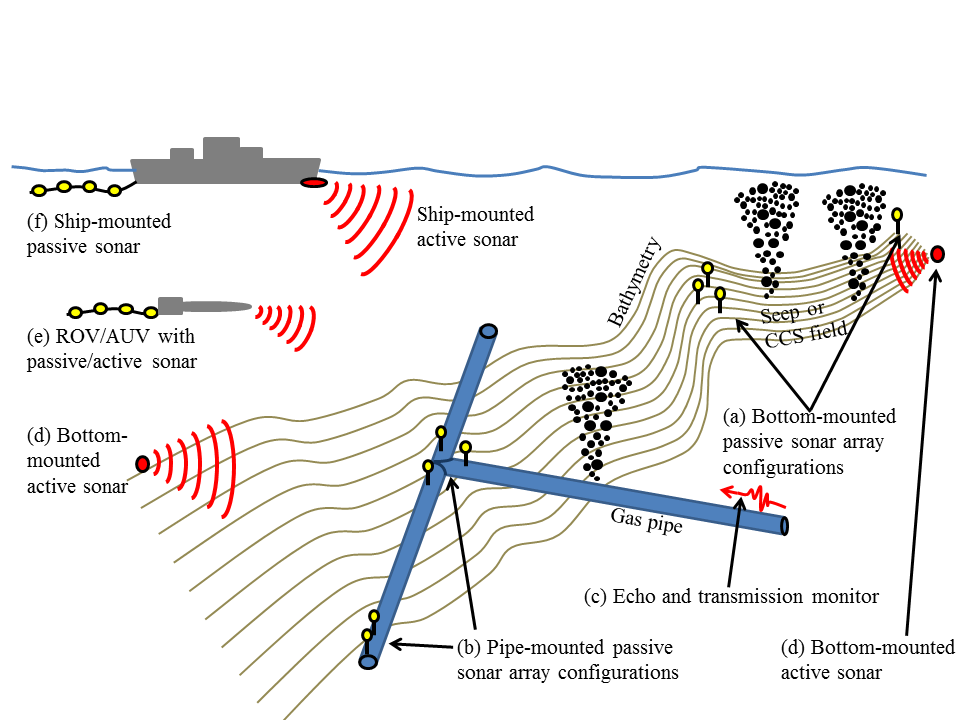
- 가스 누출 탐지: 해저(자연 누출 및 CCSF 누출)와 가스 파이프라인에서 발생하는 기포의 누출을 탐지하는 데 사용될 수 있다.
- 항공기 사고 위치 확인: 해상 추락 사고 발생 시 위치 확인을 위해 항공기에 비콘 역할을 하는 소나가 장착된다.
이 외에도 LIMIS(limpet mine imaging sonar)는 잠수부가 사용하는 휴대용 또는 ROV 장착형 영상 음파 탐지기로, 저시정(低視程) 수중에서 순찰 잠수부(전투 개구리맨 또는 폭발물 처리 잠수부)가 자석 기뢰를 찾기 위해 설계되었다. LUIS(lensing underwater imaging system)는 잠수부가 사용하는 또 다른 영상 음파 탐지기이다. 잠수부를 위한 작은 손전등 모양의 휴대용 음파 탐지기가 있었거나 있는데, 단순히 거리만 표시한다.
아르테미스 계획은 1950년대 후반부터 1960년대 중반까지 진행된 실험적인 연구 개발 프로젝트로, 해양 감시에 사용될 수 있는 저주파 능동 소나 시스템의 음파 전파 및 신호 처리를 조사하는 것을 목표로 했다. 부차적인 목표는 고정형 능동 해저 시스템의 공학적 문제를 조사하는 것이었다.[30] 수신 배열은 버뮤다 인근 플랜태지넷 해저산 사면에 위치했다. 능동 음원 배열은 제2차 세계 대전 당시의 유조선을 개조한 USNS 미션 카피스트라노에서 배치되었다.[31] 주요 실험이 종료된 후에도 아르테미스의 일부 요소는 실험적으로 사용되었다.
6. 1. 군사적 응용
능동 소나는 음파 송신기(프로젝터)와 수신기를 사용한다. 송신기와 수신기가 같은 위치에 있으면 단일 정지 방식으로, 분리되어 있으면 이정지 방식으로 작동한다.[25] 대부분의 소나는 동일한 어레이를 송신과 수신에 모두 사용하는 단일 정지 방식으로 사용된다.[26]능동 소나는 "핑(ping)"이라고 부르는 음파 펄스를 생성한 다음, 펄스의 반사(메아리)를 수신한다. 음파 펄스는 일반적으로 신호 발생기, 전력 증폭기 및 전기 음향 변환기/어레이로 구성된 소나 프로젝터를 사용하여 전자적으로 생성된다.[27] 변환기는 음향 신호("핑")를 송신 및 수신할 수 있는 장치이다.
물체까지의 거리를 측정하려면 펄스 송신부터 수신까지의 시간을 측정하고 알려진 음속을 사용하여 거리로 변환한다.[28] 방위를 측정하려면 여러 개의 수중 청음기를 사용하며, 각 수중 청음기까지의 상대적인 도착 시간을 측정하거나, 빔포밍(beamforming)이라는 과정을 통해 형성된 빔에서 상대적인 진폭을 측정하여 어레이를 사용한다.
디지털 처리가 가능해짐에 따라 펄스 압축은 일반적으로 디지털 상관 기술을 사용하여 구현되었다. 군용 소나는 종종 전방위 커버를 제공하기 위해 여러 개의 빔을 가지고 있다.
특히 단일 주파수 전송을 사용하는 경우 도플러 효과를 사용하여 타겟의 방사 속도를 측정할 수 있다. 송신 신호와 수신 신호 사이의 주파수 차이를 측정하여 속도로 변환한다.
전투 상황에서 능동 펄스는 적에게 감지될 수 있으며, 잠수함이 접촉을 감지할 수 있는 최대 거리의 두 배 거리에서 잠수함의 위치를 드러내고, 나가는 핑의 특성에 따라 잠수함의 신원에 대한 단서를 제공한다. 이러한 이유로 능동 소나는 군사 잠수함에서 자주 사용되지 않는다.
현대 해전에서는 수상함정, 항공기, 고정 설비에서 수동 및 능동 소나를 광범위하게 사용한다. 제2차 세계 대전에서 수상함정에 의해 사용되었지만, 잠수함은 적군에게 자신의 위치를 노출할 가능성 때문에 능동 소나 사용을 피했다. 그러나 현대적인 신호 처리 기술의 발전으로 수동 소나가 탐색 및 탐지 작전의 주요 수단으로 사용될 수 있게 되었다. 1987년 일본 회사 도시바의 한 부서가 소련에 잠수함 프로펠러 날개를 훨씬 조용하게 만들 수 있는 기계를 판매했다는 보도가 있었다.[45] 이로 인해 새로운 세대의 잠수함은 탐지하기가 더 어려워졌다.
수상함에서 능동 소나를 사용하는 것은 매우 일반적이며, 전술적 상황이 자신의 위치를 은폐하는 것보다 적대적인 잠수함의 위치를 결정하는 것이 더 중요하다고 판단될 때 잠수함에서도 사용된다.
수동 소나는 여러 가지 장점이 있으며, 가장 중요한 것은 소음이 없다는 것이다. 표적의 방사 소음 레벨이 충분히 높으면 능동 소나보다 더 넓은 범위를 가질 수 있으며 표적을 식별할 수 있다.
수동 소나의 또 다른 용도는 표적의 궤적을 결정하는 것이다. 이 과정을 표적 운동 분석(TMA)이라고 한다.
군사용 소나 응용 프로그램의 예는 다음과 같다.
- 어뢰: 현대 어뢰는 일반적으로 능동/수동 소나를 장착하고 있다. 음향 추적 장치의 초기 예로는 Mark 37 어뢰가 있다.
- 기뢰: 기뢰에는 필요한 표적을 탐지, 위치 파악 및 인식하기 위한 소나가 장착될 수 있다. 캡터 기뢰(CAPTOR mine)가 그 예이다.
- 잠수함: 잠수함은 수중에서는 레이더를 사용할 수 없기 때문에 소나에 더 많이 의존한다. 소나 어레이는 선체에 장착되거나 예인될 수 있다.
- 헬리콥터: 헬리콥터는 AN/AQS-13과 같은 잠수식 음파 탐지기를 운용하여 대잠전에 사용될 수 있다.
6. 2. 민간 응용
능동 소나는 음파 송신기(프로젝터)와 수신기를 사용한다. 송신기와 수신기가 같은 위치에 있으면 단일 정지 방식으로, 분리되어 있으면 이정지 방식으로 작동한다.[25] 대부분의 소나는 동일한 어레이를 송신과 수신에 모두 사용하는 단일 정지 방식으로 사용된다.[26]능동 소나는 "핑(ping)"이라고 부르는 음파 펄스를 생성하고, 그 펄스의 반사(메아리)를 수신한다. 음파 펄스는 일반적으로 소나 프로젝터를 사용하여 전자적으로 생성된다.[27] 물체까지의 거리는 펄스 송신부터 수신까지의 시간을 측정하고 알려진 음속을 사용하여 계산한다.[28] 방위는 여러 개의 수중 청음기를 사용하여 각 수중 청음기까지의 상대적인 도착 시간을 측정하거나, 빔포밍을 통해 형성된 빔에서 상대적인 진폭을 측정하여 어레이를 사용한다.
특히 단일 주파수 전송을 사용하는 경우 도플러 효과를 사용하여 타겟의 방사 속도를 측정할 수 있다. 송신 신호와 수신 신호 사이의 주파수 차이를 측정하여 속도로 변환한다.
다음은 민간에서 사용되는 소나의 활용 사례들이다.
- 어군 탐지: 어선에서 물고기 떼를 탐지하는 데 사용된다. 어군 탐지기는 물고기의 부레에서 반사되는 음파를 이용하여 어군의 위치, 크기, 밀도 등을 파악한다.
- 수심 측정: 선박에서 해저까지의 깊이를 측정하는 데 사용된다. 수심 측정기는 음파를 해저로 발사하고 반사되어 돌아오는 시간을 측정하여 수심을 계산한다.[53]
- 해저 지형 탐사: 측면 주사 음파탐지기를 사용하여 해저 지형을 이미지화한다. 이는 해저 자원 탐사, 해저 케이블 설치, 침몰선 탐색 등에 활용된다.
- 해저 자원 탐사: 강력한 저주파 에코 사운더가 해저 상층부의 단면도를 제공하기 위해 개발되었다.
- 수중 항법: 원격조종 무인잠수정(ROV) 및 무인잠수정(UUV)에 장착되어 수중에서 장애물을 탐지하고 안전하게 항해하는 데 사용된다.
- 해양 생물 연구: 능동 소나 기술을 이용하여 어류 및 기타 해양 생물의 위치, 크기, 행동 등을 연구한다.
- 수중 속도 측정: 특수한 단거리 음파 탐지기가 개발되어, 수중 속도 측정에 사용된다.
- 해저 분류: 해저를 진흙, 모래, 자갈 등으로 특징짓는 데 사용할 수 있는 음파 탐지기가 개발되었다.
- 파고 측정: 바닥이나 플랫폼에 장착된 수직 상향식 음향 측심기는 파고와 주기를 측정하는 데 사용될 수 있다.
- 가스 누출 탐지: 해저(자연 누출 및 CCSF 누출)와 가스 파이프라인에서 발생하는 기포의 누출을 탐지하는데 사용될 수 있다.
- 항공기 사고 위치 확인: 해상 추락 사고 발생 시 위치 확인을 위해 항공기에 비콘 역할을 하는 소나가 장착된다.
이 외에도 LIMIS(limpet mine imaging sonar)는 잠수부가 사용하는 휴대용 또는 ROV 장착형 영상 음파 탐지기로 저시정(低視程) 수중에서 순찰 잠수부(전투 개구리맨 또는 폭발물 처리 잠수부)가 자석 기뢰를 찾기 위해 설계되었다. LUIS(lensing underwater imaging system)는 잠수부가 사용하는 또 다른 영상 음파 탐지기이다. 잠수부를 위한 작은 손전등 모양의 휴대용 음파 탐지기가 있었거나 있는데, 단순히 거리만 표시한다.
7. 환경 영향

여러 연구에 따르면 능동 소나 사용은 해양 포유류 대량 좌초로 이어질 수 있다.[75] 좌초 피해를 가장 많이 입는 부리고래는 중주파 능동 소나에 매우 민감하다.[76] 흰긴수염고래 등 다른 해양 포유류도 소나를 피해 도망치며,[77] 해군 활동은 돌고래 대량 좌초의 가장 유력한 원인으로 꼽힌다.[78]
고래와 돌고래 같은 일부 해양 동물은 포식자와 먹이를 찾기 위해 반향 위치 측정(바이오소나) 시스템을 사용한다. 남부 캘리포니아 해역에서 흰긴수염고래를 대상으로 한 소나 영향 연구에 따르면, 중주파 소나 사용은 고래의 먹이 섭취 행동을 방해한다. 이는 소나로 인한 먹이 섭취 방해와 고품질 먹이 지역에서의 이동이 수염고래의 먹이 습성, 개체의 적응도 및 개체군 건강에 상당한, 이전에는 알려지지 않았던 영향을 미칠 수 있음을 시사한다.[80]
2019년에는 소나가 사용된 해군 훈련과 관련된 부리고래 대량 좌초에 대한 증거 검토가 발표되었다. 검토 결과, 중주파 능동 소나의 영향은 퀠비어 부리고래에 가장 강하지만 개체나 개체군에 따라 다르다. 개체의 반응 강도는 소나에 대한 이전 노출 여부에 따라 달라질 수 있으며, 좌초된 고래에게서 감압병 증상이 발견되기도 했다. 이는 소나에 대한 반응의 결과일 수 있다. 소나 사용 해군 훈련이 금지된 카나리아 제도에서는 이전에 여러 차례 좌초가 보고되었지만 더 이상 대량 좌초가 발생하지 않았다는 점을 들어, 대량 좌초가 계속 발생하는 다른 지역으로 금지 조치를 확대할 것을 권고했다.[81][82]
저주파 소나는 일부 어류의 청력 역치에 일시적인 작은 변화를 일으킬 수 있다.[83][84]
8. 한국의 소나 기술
(이전 단계에서 결과값이 빈 문자열이었으므로, 수정할 내용이 없습니다. 빈 문자열을 그대로 반환합니다.)
참조
[1]
서적
Stalin's Ocean-going Fleet: Soviet Naval Strategy and Shipbuilding Programmes, 1935–1953
https://books.google[...]
Psychology Press
[2]
서적
Administrative Practices Glossary of Standardized Terms
https://books.google[...]
U.S. Government Printing Office
2022-11-02
[3]
백과사전
Sonar
https://www.britanni[...]
2019-01-18
[4]
서적
A Dictionary of Aviation
Osprey
[5]
서적
Underwater SLAM for Structured Environments Using an Imaging Sonar
https://books.google[...]
Springer Science & Business Media
2010-07-26
[6]
서적
Fundamentals of noise and vibration
Taylor & Francis
[7]
서적
Applied Underwater Acoustics: Leif Bjørnø
Elsevier
[8]
서적
Principles of Sonar Performance Modeling
Springer
[9]
서적
Physical Oceanography
Harvard University Press
[10]
서적
Seek and Strike
[11]
서적
The cosmic inventor: Reginald Aubrey Fessenden (1866–1932)
American Philosophical Society
[12]
학술지
Wireless under the water: a remarkable device that enables a ship's captain to determine the exact location of another ship even en the densest fog
https://books.google[...]
2009-08-04
[13]
학술지
Report of Captain J. H. Quinan of the U.S.R.C. Miami on the echo fringe method of detecting icebergs and taking continuous soundings
1914-05-13
[14]
웹사이트
The rotary bowcap
http://www.gwpda.org[...]
2007-06-26
[15]
웹사이트
World War II Naval Dictionary
http://abbot.us/DD62[...]
2019-11-12
[16]
서적
Seek & Strike: Sonar, anti-submarine warfare and the Royal Navy 1914–54
HMSO
[17]
서적
The Fighting Captain: Frederic John Walker RN and the Battle of the Atlantic
Pen and Sword
1993
[18]
서적
Howeth: Chapter XXXIX
https://babel.hathit[...]
Washington
1963
[19]
웹사이트
AIP Oral History: Frederick Vinton Hunt, Part II
https://www.aip.org/[...]
2015-02-23
[20]
기타
[21]
서적
Fundamentals of Sonar
U. S. Naval Institute, Annapolis, MD.
[22]
웹사이트
Sonar Transducers: A History
http://www.massa.com[...]
2015-04-18
[23]
웹사이트
Japanese Sonar and Asdic
http://www.fischer-t[...]
2015-05-08
[24]
학술지
Transducers and Arrays for Underwater Sound
https://books.google[...]
[25]
웹사이트
Basic Sonar System (Active)
https://fas.org/man/[...]
2020-06-22
[26]
서적
Applied Underwater Acoustics
Elsevier
[27]
서적
Applied underwater acoustics
Pergamon Press
1966
[28]
웹사이트
NOAA Ocean Explorer: Technology: Observation Tools: SONAR
https://oceanexplore[...]
2020-06-22
[29]
서적
Applied Underwater Acoustics
Elsevier
[30]
보고서
Project Artemnis Acoustic Source Summary Report
https://apps.dtic.mi[...]
U.S. Naval Research Laboratory
2020-04-19
[31]
보고서
A History of the Acoustics Division of the Naval Research Laboratory The First Eight Decades 1923—2008
https://apps.dtic.mi[...]
Naval Research Laboratory
2020-04-19
[32]
웹사이트
Lightweight Actuation Transponder (LAT)
https://www.sonardyn[...]
2020-06-23
[33]
표준
Underwater acoustics - terminology. Sonar equation, entry 3.6.2.3
ISO
[34]
웹사이트
Stoat: Sea ice: What I do in my spare time :-)
http://mustelid.blog[...]
2017-10-19
[35]
학술지
Advances in upward looking sonar technology for studying the processes of change in Arctic Ocean ice climate
2008-01-01
[36]
웹사이트
Blue-sea thinking
https://www.economis[...]
2020-11-16
[37]
웹사이트
Science of Sound
https://www.usff.nav[...]
U.S. Fleet Forces Command
2023-10-30
[38]
서적
Principles of Sonar Performance Modeling
Springer
[39]
논문
Asymmetric transfer of CO2 across a broken sea surface
[40]
논문
Escape of methane gas from the seabed along the West Spitsbergen continental margin
[41]
논문
Escape of methane gas from the seabed along the West Spitsbergen continental margin
http://nora.nerc.ac.[...]
[42]
논문
Clutter suppression and classification using twin inverted pulse sonar (TWIPS)
http://resource.isvr[...]
[43]
논문
Do dolphins benefit from nonlinear mathematics when processing their sonar returns?
http://resource.isvr[...]
[44]
논문
Clutter suppression and classification using twin inverted pulse sonar in ship wakes
http://resource.isvr[...]
[45]
웹사이트
How The Soviet Akula Changed Submarine Warfare
https://foxtrotalpha[...]
2020-01-15
[46]
간행물
SOSUS The "Secret Weapon" of Undersea Surveillance
https://www.public.n[...]
2020-01-05
[47]
웹사이트
Integrated Undersea Surveillance System (IUSS) History 1950 - 2010
http://www.iusscaa.o[...]
IUSS/CAESAR Alumni Association
2020-05-22
[48]
논문
The Heard Island Feasibility Test
https://docs.google.[...]
Acoustical Society of America
2020-09-26
[49]
서적
Speech Physiology, Speech Perception, and Acoustic Phonetics
https://books.google[...]
Cambridge University Press
2020-05-22
[50]
웹사이트
Origins of SOSUS
https://www.public.n[...]
Commander, Undersea Surveillance
2020-05-22
[51]
논문
Very High Resolution Imaging Diver Held Sonar
http://archive.rubic[...]
2008-08-11
[52]
웹사이트
Diver Charting and Graphical Display
http://archive.rubic[...]
Texas Univ at Austin Applied Research Labs
2009-01-21
[53]
웹사이트
NOAA Ocean Explorer: Echo Sounding Reading
http://oceanexplorer[...]
[54]
웹사이트
This Suit Gives You A Real Life Spider-Sense
https://www.forbes.c[...]
2013-03-12
[55]
웹사이트
Acoustic Hake Survey Methods on the West Coast
https://www.fisherie[...]
2023-07-29
[56]
웹사이트
Weightless in the Water
https://blogs.ifas.u[...]
2023-07-29
[57]
논문
Exploration and reconstruction of a medieval harbour using hydroacoustics, 3-D shallow seismic and underwater photogrammetry: A case study from Puck, southern Baltic Sea
2021-05-08
[58]
논문
Quantification of undersea gas leaks from carbon capture and storage facilities, from pipelines and from methane seeps, by their acoustic emissions
http://resource.isvr[...]
[59]
논문
Detection and impacts of leakage from sub-seafloor deep geological carbon dioxide storage
https://eprints.soto[...]
2014-09-28
[60]
논문
Passive acoustic quantification of gas fluxes during controlled gas release experiments
http://eprints.soton[...]
[61]
논문
Review of Offshore Monitoring for CCS Projects
http://resource.isvr[...]
[62]
논문
Review of offshore CO2 storage monitoring: Operational and research experiences of meeting regulatory and technical requirements
[63]
논문
Review of scattering and extinction cross-sections, damping factors, and resonance frequencies of a spherical gas bubble
http://resource.isvr[...]
[64]
서적
Some Finite Amplitude Effects in Underwater Acoustics
V M Albers "Underwater Acoustics"
[65]
논문
Parametric acoustic array
[66]
논문
Acoustic and related waves in extraterrestrial environments
http://resource.isvr[...]
2016-08-01
[67]
논문
[68]
논문
The sounds of seas in space
http://resource.isvr[...]
[69]
논문
Sonar equations for planetary exploration
http://resource.isvr[...]
[70]
논문
The problems with acoustics on a small planet
http://resource.isvr[...]
[71]
논문
Acoustic attenuation, phase and group velocities in liquid-filled pipes II: Simulation for Spallation Neutron Sources and planetary exploration
http://resource.isvr[...]
[72]
논문
Fluid loading effects for acoustical sensors in the atmospheres of Mars, Venus, Titan, and Jupiter
http://resource.isvr[...]
[73]
논문
Near resonant bubble acoustic cross-section corrections, including examples from oceanography, volcanology, and biomedical ultrasound
http://resource.isvr[...]
[74]
논문
The opportunities and challenges in the use of extra-terrestrial acoustics in the exploration of the oceans of icy planetary bodies
http://resource.isvr[...]
[75]
뉴스
Whales flee from military sonar leading to mass strandings, research shows
https://www.theguard[...]
2013-07-03
[76]
논문
First direct measurements of behavioural responses by Cuvier's beaked whales to mid-frequency active sonar
[77]
논문
Blue whales respond to simulated mid-frequency military sonar
2013-07-03
[78]
논문
What caused the UK's largest common dolphin (Delphinus delphis) mass stranding event?
2013-04-30
[79]
웹아카이브
Winter vs. National Resources Defense Council
https://web.archive.[...]
2017-12-09
[80]
논문
Blue whales respond to simulated mid-frequency military sonar
2013-07-03
[81]
논문
Advances in research on the impacts of anti-submarine sonar on beaked whales
2019-01-30
[82]
뉴스
Scientists demand military sonar ban to end mass whale strandings
https://www.independ[...]
2019-01-30
[83]
논문
The effects of high-intensity, low-frequency active sonar on rainbow trout
[84]
논문
Effects of low-frequency naval sonar exposure on three species of fish
[85]
서적
The Naval Institute Guide to World Naval Weapons Systems, 1997–1998
https://books.google[...]
Naval Institute Press
[86]
서적
Ships from the Depths
https://books.google[...]
Texas A&M University Press
2011-04-28
[87]
웹사이트
海上自衛隊の職域
https://web.archive.[...]
[88]
웹사이트
国税庁 漁ろう用設備に該当するもの
http://www.nta.go.jp[...]
[89]
서적
The cosmic inventor: Reginald Aubrey Fessenden (1866-1932)
American Philosophical Society
[90]
서적
Physical Oceanography
Harvard University Press
[91]
논문
艦艇 (特集・ASWのすべて) - (対潜艦艇・航空機・兵器の歩み)
海人社
[92]
논문
ASWの発達と今後の展望 (特集・ASWのすべて)
海人社
[93]
논문
兵器 (特集・ASWのすべて) - (対潜艦艇・航空機・兵器の歩み)
海人社
[94]
논문
Development and application of piezoelectric materials for ultrasound generation and detection
[95]
논문
センサー (現代の掃海艦艇を解剖する)
海人社
[96]
서적
Underwater Acoustics: Analysis, Design and Performance of Sonar
https://books.google[...]
John Wiley & Sons
2013
[97]
웹사이트
魚群探知機の誕生
http://www.furunosty[...]
[98]
웹사이트
古野電気株式会社 魚群探知機 特許:特公昭31-3583ほか
http://www.kjpaa.jp/[...]
[99]
웹사이트
プロジェクトX 挑戦者たち 夢 遙か、決戦への秘策 兄弟10人 海の革命劇/魚群探知機・ドンビリ船の奇跡
http://www.papy.co.j[...]
[100]
서적
A Dictionary of Aviation
https://archive.org/[...]
Osprey
[101]
서적
Fundamentals of noise and vibration
Taylor & Francis
[102]
기타
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com