쿼드콥터
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
쿼드콥터는 4개의 회전익(로터)을 사용하여 비행하는 무인 헬리콥터의 일종으로, '쿼드로터' 또는 '4중 회전익기' 등으로도 불린다. 1907년 최초의 쿼드콥터 시도가 있었으며, 2010년 Parrot사의 AR.Drone 출시 이후 스마트폰 기술 발전과 함께 대중화되었다. 쿼드콥터는 각 로터의 속도를 조절하여 기체의 자세와 움직임을 제어하며, 비행 시간은 배터리 용량, 모터 효율 등에 따라 달라진다. 자율 비행, 군사적 이용, 범죄 활동 등 다양한 분야에서 활용되며, 드론 레이싱 대회에도 사용된다. 쿼드콥터의 안전성과 관련된 법규 및 규제가 각 국가에서 마련되어 있으며, 로터 고장 시 추락 위험이 있어 안전이 중요한 분야에서는 6개 또는 8개의 로터를 가진 멀티콥터가 사용되기도 한다.
더 읽어볼만한 페이지
| 쿼드콥터 | |
|---|---|
| 지도 | |
| 기본 정보 | |
| 종류 | 헬리콥터 |
| 회전 날개 개수 | 4개 |
| 영어 명칭 | Quadrotor, Quadcopter |
| 추가 정보 | |
| 특징 | 4개의 로터가 있는 헬리콥터 |
2. 명칭
쿼드콥터는 '4'를 뜻하는 "quad-" 또는 "quadro-"와 '회전익'을 뜻하는 "rotor", 그리고 헬리콥터를 조합한 단어이다. "quad"는 쿼드, 쿠아드, 쿼도 등으로 음역된다.
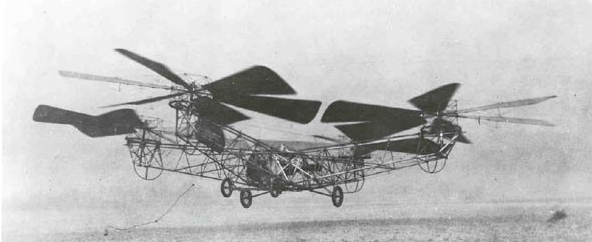
1907년 루이 브레게(Louis Breguet)가 4개의 로터를 가진 헬리콥터 '브레게-리셰 자이로플레인(Breguet-Richet Gyroplane)'의 비행을 시도했다.[10] 1920년대 에티엔 엄미션(Etienne Oehmichen)은 4개의 로터와 8개의 프로펠러를 가진 엄미션 2호(Oehmichen No.2)를 개발하여 1,000회 이상의 시험 비행을 실시했고,[11] 1924년 4월 14일에는 헬리콥터 최초로 360m의 FAI 거리 기록을 세웠으며, 회전익 항공기로 1km 폐쇄 회로 비행을 완료했다.
영어로는 quadrotor|쿼드로터영어, quadrotor helicopter|쿼드로터 헬리콥터영어, quadcopter|쿼드콥터영어, quadrocopter|쿼드로콥터영어 등으로 불린다.
3. 역사
1922년 조르주 드 보테자(George de Bothezat)와 이반 제롬(Ivan Jerome)이 개발한 드 보테자 헬리콥터(de Bothezat helicopter)가 첫 비행을 했다.[12] 미국 육군 항공대(United States Army Air Service)에 의해 제작된 이 헬리콥터는 1923년 말까지 약 100회의 비행을 실시했으며, 최고 고도는 약 5m에 달했다.
1980년대에 나고야 대학(名古屋大学)에서 전동식 쿼드콥터 개발이 진행되었으나,[31][32] 당시에는 축전지 용량이 적었기 때문에 외부에서 전력을 공급하는 유선 방식이었다. 1989년 7월, 키엔스(キーエンス)는 세계 최초로 키엔스 자이로소서 E-170을 출시했지만, 비행 시간은 1분 30초였다.[33]
2000년대 초반부터 쿼드콥터는 소형 무인 항공기(드론) 분야에서 인기를 얻었다. 4개의 로터 설계는 쿼드콥터가 비교적 단순하면서도 높은 신뢰성과 조종성을 갖도록 한다. 2005년에서 2010년 사이에는 전자 기술의 발전으로 저렴하고 가벼운 비행 컨트롤러, 가속도계(IMU), GPS, 카메라를 생산할 수 있게 되면서 쿼드콥터가 소형 무인 항공기에 널리 사용되는 결과로 이어졌다.
1990년대 초 일본에서 소형 장난감 무선 조종 쿼드콥터가 생산되기도 했지만, 카메라가 장착된 최초의 쿼드콥터가 상당한 수량으로 생산된 것은 1999년 캐나다 신생 기업 드래건플라이(Draganfly Inc.)의 Draganflyer Stabilized Aerial Video System (Draganflyer I)이었다.[18][19] 2010년 Parrot사가 4모터 쿼드콥터 "AR.Drone"을 출시하여 큰 충격을 주었고, 대히트 상품이 되었다. 이후 여러 회사들이 쿼드로터 개발에 참여했고, DJI의 "Phantom" 시리즈 등장으로 시장이 확대되었다.
3. 1. 초기 역사 (해외)
1907년 루이 브레게(Louis Breguet)가 설계한 4개의 로터를 가진 헬리콥터 '브레게-리셰 자이로플레인(Breguet-Richet Gyroplane)'의 비행이 시도되었다.[10]
1920년대 에티엔 엄미션(Etienne Oehmichen)은 4개의 로터와 8개의 프로펠러를 가진 엄미션 2호(Oehmichen No.2)를 개발하여 1,000회 이상의 시험 비행을 실시했다.[11] 1924년 4월 14일에는 헬리콥터 최초로 360m의 FAI 거리 기록을 세웠으며, 회전익 항공기로 1km 폐쇄 회로 비행을 완료했다.
1922년 조르주 드 보테자(George de Bothezat)와 이반 제롬(Ivan Jerome)이 개발한 드 보테자 헬리콥터(de Bothezat helicopter)가 첫 비행을 했다.[12] 미국 육군 항공대(United States Army Air Service)에 의해 제작된 이 헬리콥터는 1923년 말까지 약 100회의 비행을 실시했으며, 최고 고도는 약 5m에 달했다.
3. 2. 초기 역사 (일본)
1980년대에 나고야 대학(名古屋大学)에서 전동식 쿼드콥터 개발이 진행되었다.[31][32] 당시에는 축전지 용량이 적었기 때문에 외부에서 전력을 공급하는 유선 방식이었다.
1989년 7월, 키엔스(キーエンス)는 세계 최초로 키엔스 자이로소서 E-170을 출시했다. 비행 시간은 1분 30초였다.[33]
3. 3. 현대의 발전
2000년대 초반부터 쿼드콥터는 소형 무인 항공기(드론) 분야에서 인기를 얻었다. 향상된 조종성과 호버링(정지 비행) 능력에 대한 요구가 커지면서 쿼드콥터 연구가 활발해졌다. 4개의 로터 설계는 쿼드콥터가 비교적 단순하면서도 높은 신뢰성과 조종성을 갖도록 한다. 다중 항공기 통신, 환경 탐사, 조종성 개선 등의 연구를 통해 쿼드콥터의 기능은 계속 발전하고 있으며, 현재 다른 차량으로는 불가능한 고급 자율 임무를 수행할 수 있게 되었다.[17]
1990년대 초 일본에서 소형 장난감 무선 조종 쿼드콥터가 생산되기도 했지만, 카메라가 장착된 최초의 쿼드콥터가 상당한 수량으로 생산된 것은 1999년 캐나다 신생 기업 드래건플라이(Draganfly Inc.)의 Draganflyer Stabilized Aerial Video System (Draganflyer I)이었다.[18][19]
2005년에서 2010년 사이에는 전자 기술의 발전으로 저렴하고 가벼운 비행 컨트롤러, 가속도계(IMU), GPS, 카메라를 생산할 수 있게 되었다. 이는 쿼드콥터가 소형 무인 항공기에 널리 사용되는 결과로 이어졌다. 작은 크기와 조종성 덕분에 쿼드콥터는 실내외에서 모두 비행할 수 있다.[20][21]
소형 드론의 경우, 쿼드콥터는 기계적 단순성으로 인해 기존 헬리콥터보다 저렴하고 내구성이 좋다.[22] 또한 더 작은 블레이드는 운동 에너지가 적어 손상을 입힐 가능성이 줄어든다. 소형 쿼드콥터는 가까운 거리에서 상호 작용하기에 더 안전하며, 로터를 감싸는 보호대를 장착하여 손상 가능성을 더욱 줄일 수도 있다.[23] 그러나 크기가 커지면 고정 프로펠러 쿼드콥터는 기존 헬리콥터에 비해 단점을 보인다. 블레이드 크기가 커지면 그 운동량이 커져 블레이드 속도 변화에 더 많은 시간이 걸리고, 이는 제어에 악영향을 미친다. 헬리콥터는 로터 디스크 크기를 키워도 블레이드 피치 제어 능력에 큰 영향을 미치지 않아 이러한 문제가 없다.
제작 및 제어가 쉽기 때문에 쿼드콥터는 아마추어 모형 항공기 프로젝트로 인기를 얻고 있다.[24][25]
1980년대에 나고야 대학에서 전동식 쿼드콥터 개발이 진행되었다.[31][32] 당시에는 축전지 용량이 적어 외부에서 전력을 공급하는 유선 방식이었다.
1989년 7월, 키엔스는 세계 최초로 「키엔스 자이로소서 E-170」을 출시했다. 비행 시간은 1분 30초였다.[33] 북미에서는 그로부터 10년 후 "Draganflyer"가 등장하여 영화에 사용되는 등 쿼드콥터가 점차 보급되기 시작했다.[34] 당시 자이로스코프는 모터로 팽이를 회전시키는 방식이었지만, 2000년대 이후 멀티콥터 보급에는 스마트폰 등에 사용되는 MEMS자이로스코프와 가속도 센서가 대량 생산되어 저렴해진 것이 큰 영향을 미쳤다.
2010년 Parrot사가 4모터 쿼드콥터 "AR.Drone"을 출시했다. 그때까지 주로 산업용 장비였던 드론을 일반인도 쉽게 구입하고 비행할 수 있다는 점은 큰 충격을 주었고, 대히트 상품이 되었다. 각 회사는 쿼드로터 개발에 참여했고, DJI의 "Phantom" 시리즈 등장으로 시장이 확대되었다. 쿼드로터는 취미용으로 확고한 지위를 굳히는 데 기여했다. 6모터나 8모터 멀티콥터와 비교했을 때, 모터 수가 적어 기체 경량화의 장점이 있으며, 저렴하게 제작이 가능하고 적은 배터리로 항속 거리를 늘릴 수 있어 현재 쿼드콥터는 취미용 보급형 모델에 많다.
진행 방향은 고정 피치 회전익의 회전 속도를 변경하여 발생하는 추력과 토크를 변경하는 방식으로 제어하는 것이 일반적이지만, 가변 피치 회전익으로 추력을 변경하여 제어하는 방식도 있다.[35]
4. 설계 원리
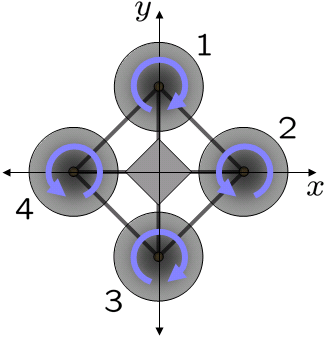
쿼드콥터는 일반적으로 시계 방향(CW)으로 회전하는 로터 두 개와 시계 반대 방향(CCW)으로 회전하는 로터 두 개를 가진다. 각 로터의 속도를 독립적으로 변화시켜 비행을 제어한다. 피치와 롤은 순 추력 중심을 변화시켜 제어하고, 요(Yaw)는 순 토크를 변화시켜 제어한다.[1]
기존의 헬리콥터와 달리 쿼드콥터는 일반적으로 사이클릭 피치 제어(회전하는 동안 블레이드의 각도가 역동적으로 변하는 방식)를 사용하지 않는다. 초기 비행 단계에서 쿼드콥터(당시에는 "쿼드로터" 또는 단순히 "헬리콥터"로 불림)는 수직 이착륙의 지속적인 문제에 대한 가능한 해결책으로 여겨졌다. 반대 회전으로 토크로 인한 제어 문제(그리고 유용한 양력을 생성하지 않는 테일 로터에서 발생하는 효율성 문제)를 해결할 수 있으며, 비교적 짧은 블레이드는 제작이 훨씬 용이했다. 1920년대와 1930년대에 여러 유인 설계가 등장했다. 이러한 차량은 최초로 성공한 수직 이착륙 (VTOL) 항공기 중 하나였다.[2] 그러나 초기 시제품은 성능이 좋지 않았으며,[2] 후기 시제품은 안정성 증강[3]이 부족하고 제어 권한이 제한적이어서 조종사의 작업 부하가 너무 많았다.
쿼드콥터의 빨간색 로터(프로펠러)는 시계 방향으로, 파란색 로터는 시계 반대 방향으로 회전하여 추력과 토크를 생성한다. 모든 로터의 회전 속도를 높이면 기체는 상승하고, 회전 속도를 낮추면 기체는 하강한다. 또한 각 로터의 회전 속도를 변경하여 기체를 앞뒤좌우로 회전시킬 수 있다.
4. 1. 추력과 토크
각 로터는 회전 중심을 중심으로 양력과 토크를 생성하고, 비행 방향과 반대 방향으로 항력을 생성한다. 쿼드콥터는 일반적으로 시계 방향(CW)으로 회전하는 로터 두 개와 시계 반대 방향(CCW)으로 회전하는 로터 두 개를 가지고 있다. 각 로터의 속도, 따라서 양력과 토크를 독립적으로 변화시켜 비행 제어를 한다. 피치와 롤은 순 추력 중심을 변화시켜 제어하고, 요(Yaw)는 순 토크를 변화시켜 제어한다.[1]네 개의 로터가 모두 같은 각속도로 회전하고, 두 개는 시계 방향으로, 두 개는 시계 반대 방향으로 회전한다면, 방향 축에 대한 순 토크는 0이 된다. 이는 기존 헬리콥터와 같은 테일 로터가 필요 없다는 것을 의미한다. 방향 전환은 공기역학적 토크의 균형을 맞추지 않음으로써(즉, 반대 방향으로 회전하는 블레이드 쌍 사이의 누적 추력 명령을 상쇄함으로써) 유도된다.[4][5]



| 쿼드콥터의 로터 1과 3은 시계 방향으로 회전하고, 로터 2와 4는 시계 반대 방향으로 회전하여 제어를 위해 반대 토크를 생성한다. | 4개의 로터 모두에 동일한 추력을 가하여 호버링을 수행한다. | 한 방향으로 회전하는 로터에 더 많은 추력을 가하여 요(요잉)를 조정한다. | 하나의 로터(또는 두 개의 인접한 로터)에 더 많은 추력을 가하고 정반대의 로터에 적은 추력을 가하여 피치 또는 롤을 조정한다. |
|---|---|---|---|
 |
4. 2. 와류 링 상태
모든 쿼드콥터는 와류 링 상태를 포함한 일반적인 회전익기 공기역학의 영향을 받는다.4. 3. 기계 구조

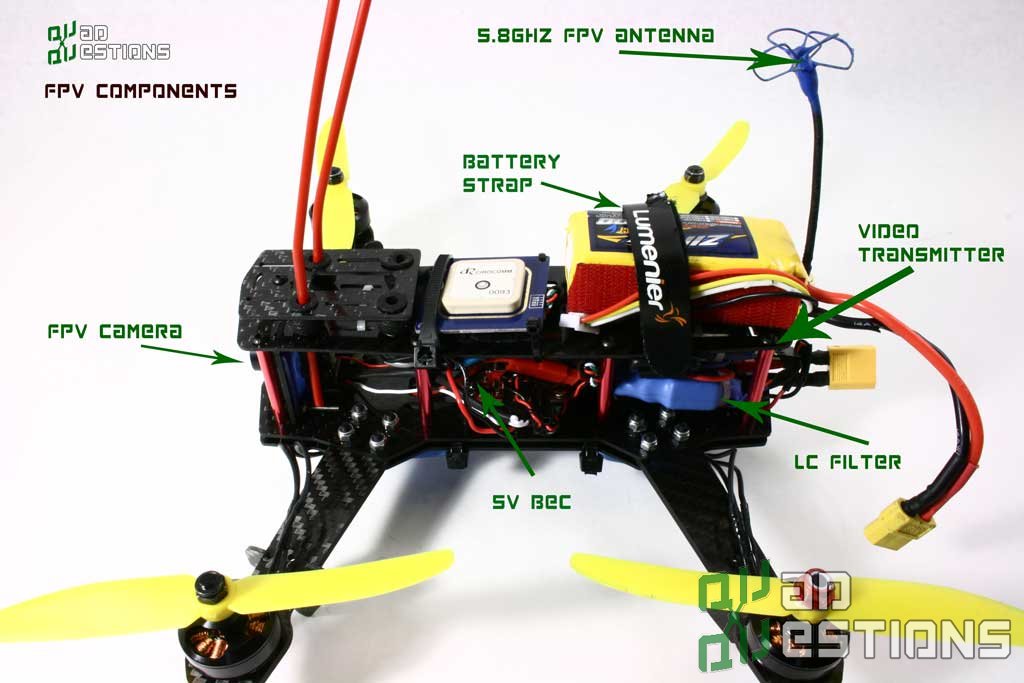
쿼드콥터의 주요 기계 부품은 동체(프레임), 4개의 로터(고정 피치 또는 가변 피치), 모터, 프로펠러(모터 및 변속기 포함), 배터리, FC(flight controller), 센서(자이로센서, GPS, 와이파이, 블루투스, 초음파 감지기 등)이다.[6]
FC(Flight Controller) 회로기판은 통신, 연산, 각 모터의 파워 (BEC 포함), 변속기 제어 등 모든 부품의 기능을 통합하여 제어하므로, 비행 기능 유지에 핵심적인 역할을 한다. 대중적인 FC로는 아트멜 AVR MCU 칩을 장착한 아두이노 계열 또는 ARM Cortex-MX 칩을 장착한 아두파일럿 계열이 있다.[43]
드론의 추진기는 프로펠러, 모터, 전자변속기(ESC)로 구성되며, 이를 서보모터라고 한다.[44][45]
무선조종기는 드론의 통신기와 데이터를 주고받는 장치로, FC 보드만큼 중요하다. 특히 경로 비행에 핵심적인 역할을 한다.[46][47] 최상의 성능과 간단한 제어 알고리즘을 위해 모터와 프로펠러는 등거리에 위치한다.
4. 4. 동축 로터
무게를 줄이면서 동력과 안정성을 높이기 위해, 다른 멀티로터와 마찬가지로 쿼드콥터는 동축 로터 구성을 사용할 수 있다. 이 경우 각 암에는 반대 방향으로 회전하는 두 개의 모터(하나는 위쪽을 향하고 하나는 아래쪽을 향함)가 있다.5. 비행 제어

쿼드콥터는 네 개의 로터의 상대적인 속도를 조절하여 기체의 자세와 움직임을 제어한다. x, y, z축에 대응하는 롤링, 피칭, 요잉이 있다. 각 축을 중심으로 회전할 때, x축은 롤링, y축은 피칭, z축은 요잉이 된다.
2000년대 초반부터 쿼드콥터 형태는 소형 무인 항공기(드론)에 있어 인기를 얻게 되었다. 향상된 조종성과 호버링 능력은 쿼드콥터 연구 증가의 계기가 되었다. 4개의 로터 설계는 쿼드콥터가 설계상 비교적 단순하면서도 높은 신뢰성과 조종성을 갖추도록 한다. 다중 항공기 통신, 환경 탐사 및 조종성 개선을 통해 쿼드콥터의 기능을 향상시키기 위한 연구가 계속되고 있으며, 이러한 발전하는 특성들을 결합한다면, 쿼드콥터는 현재 다른 차량으로는 불가능한 고급 자율 임무를 수행할 수 있을 것이다.[17]
1990년대 초 일본에서 소형 장난감 무선 조종 쿼드콥터가 생산되기는 했지만, 카메라가 장착된 최초의 쿼드콥터가 상당한 수량으로 생산된 것은 1999년 캐나다 신생 기업 드래건플라이(Draganfly Inc.)의 Draganflyer Stabilized Aerial Video System (소급적으로 Draganflyer I)이었다.[18][19]
2005년에서 2010년 사이에는 전자 기술의 발전으로 저렴하고 가벼운 비행 컨트롤러, 가속도계(IMU), GPS 및 카메라를 생산할 수 있게 되었다. 이는 쿼드콥터 구성이 소형 무인 항공기에 인기를 얻게 된 결과를 가져왔다. 소형 크기와 조종성으로 인해 이러한 쿼드콥터는 실내외에서 모두 비행할 수 있다.[20][21]
소형 드론의 경우, 쿼드콥터는 기계적 단순성으로 인해 기존의 헬리콥터보다 저렴하고 내구성이 뛰어나다.[22] 또한 더 작은 블레이드는 운동 에너지가 적어 손상을 입힐 가능성이 줄어든다는 장점도 있다. 소형 쿼드콥터의 경우, 이는 차량이 가까운 상호 작용에 더 안전하도록 만든다. 로터를 감싸는 보호대를 장착하여 손상 가능성을 더욱 줄일 수도 있다.[23] 그러나 크기가 커짐에 따라 고정 프로펠러 쿼드콥터는 기존 헬리콥터에 비해 단점을 드러낸다. 블레이드 크기가 커지면 그 운동량이 커져 블레이드 속도 변화에 더 많은 시간이 걸려 제어에 악영향을 미친다. 헬리콥터는 로터 디스크 크기를 키운다고 해서 블레이드 피치 제어 능력에 큰 영향을 미치지 않기 때문에 이러한 문제가 발생하지 않는다.
제작 및 제어의 용이성으로 인해 쿼드콥터는 아마추어 모형 항공기 프로젝트로 인기를 얻고 있다.[24][25]
5. 1. 롤(Roll)과 피치(Pitch)
쿼드콥터는 네 개의 로터의 상대적인 속도를 조절함으로써 기체의 자세와 움직임을 제어한다.
기체의 앞(진행 방향)과 나란하며 기체의 무게중심을 지나는 축에 대한 기체의 회전을 roll(롤 또는 롤링)이라 하고, 이 축과 수직한 축에 대한 기체의 회전을 pitch(피치 또는 피칭)라고 한다. 즉, 기체가 전후좌우로 기울어지도록 자세를 제어하기 위해서는 높이고자 하는 쪽의 로터의 출력을 다른 로터보다 강하게 한다. 예를 들어 후방 로터의 출력을 상대적으로 강하게 할 경우 기체가 전방으로 기울어져 전진하게 된다.

5. 2. 요(Yaw)
기체를 세로로 관통하는 축에 대한 기체의 회전을 요(yaw) 또는 요잉이라고 하며, 이는 회전 방향이 반대인 두 쌍의 로터의 출력을 다르게 함으로써 조종할 수 있다.[4][5]만약 네 개의 로터가 정확히 같은 출력을 낸다면, 기체의 세로축을 중심으로 한 요(yaw) 돌림힘의 합력은 0이 되어 기체는 평형을 유지한다. 회전 방향이 서로 반대인 두 쌍의 로터 출력이 같지 않도록 하면 세로축을 중심으로 한 돌림힘이 발생하여 출력이 강한 로터의 회전 방향으로 기체가 회전한다.
네 개의 로터가 모두 같은 각속도로 회전하고, 두 개는 시계 방향으로, 두 개는 시계 반대 방향으로 회전한다면, 방향 축에 대한 순 토크는 0이 된다. 이는 기존 헬리콥터와 같은 테일 로터가 필요 없다는 것을 의미한다. 방향 전환은 공기역학적 토크의 균형을 맞추지 않음으로써(즉, 반대 방향으로 회전하는 블레이드 쌍 사이의 누적 추력 명령을 상쇄함으로써) 유도된다.
6. 쿼드콥터의 균형 및 호버링
쿼드콥터는 4개의 모터를 사용하여 균형을 잡고, 공중에 정지 상태를 유지하는 호버링(Hovering)을 한다.
쿼드콥터는 4개의 모터가 서로 영향을 주기 때문에, 안정적인 균형을 위해 PID 제어를 사용한다.[48] 호버링은 드론이 공중에서 정지 상태를 유지하는 것을 말하며, 모터의 추력이 중요하다. 1,000g의 쿼드콥터를 띄우려면 각 모터는 250g의 추력이 필요하지만, 안정적인 호버링을 위해서는 각 모터 당 500g, 즉 설계 값의 약 2배의 추력이 필요하다.
위 표에서 11V 기준 6A에서는 호버링이 불안정하며, 7A 이상에서 안정된다. 호버링 안정성은 바람이나 가속 상황에서 드론 통제에 큰 영향을 준다.
6. 1. 쿼드콥터의 균형
4개의 모터를 추진력으로 사용하는 쿼드콥터는 초기 작동 및 비행 시 각각의 모터들이 자신뿐만 아니라 서로에게 영향을 미치므로, 온전한 수평을 유지하기 어렵다. 따라서 중심이 잡힌 안정된 비행을 하기 위해 PID 제어를 통해 균형값을 구현한다.[48]6. 2. 호버링(Hovering)
호버링은 드론이 공중에서 비행 시 정지 상태를 일정 기간 유지하는 능력을 말한다. 호버링 능력의 주요 요소는 모터의 추력이다. 4개의 모터를 갖는 쿼드콥터 기준으로 1,000g의 비행체를 들어 올리기 위해서는 각 모터가 250g의 추력을 가져야 한다. 그러나 호버링의 안정성을 위해서는 설계 값의 약 2배의 추력이 필요하며, 따라서 각 모터 당 500g의 추력이 필요하다.다음은 모터의 성능을 나타내는 표이다.
위 표에서 11V 기준으로 6A에서는 호버링이 불안정하며, 7A 이상에서 안정된다고 설계할 수 있다.
호버링의 안정성은 바람 같은 외적 환경이나 가속도가 붙는 상황에서의 통제력에 큰 영향을 미친다.
7. 비행 시간
배터리로 구동되는 쿼드콥터가 달성한 최장 비행 시간은 2시간 31분 30초이다. 이 기록은 2016년 독일의 페르디난트 키킹거(Ferdinand Kickinger)가 세웠다.[7] 키킹거는 기록 달성을 위해 저방전율 고용량 리튬이온 배터리를 사용하고, 동체에서 불필요한 무게를 제거하여 전력 소모를 줄이고 비행 지속 시간을 늘렸다.[8]
수소 연료 전지와 하이브리드 가솔린-전기 발전기와 같은 대체 동력원은 수소와 가솔린의 높은 에너지 밀도 덕분에 비행 지속 시간을 획기적으로 늘리는 데 사용되었다.[9]
호버링(hovering)의 안정성은 모터 효율과 관련이 있으며 바람같은 외적 환경이나 가속도가 붙는 상황에서의 통제력에 큰 영향을 미친다. 안정된 호버링을 위한 모터 효율을 70%로 가정하고, 배터리(60분 기준) 용량이 11V 2500mAh일 때, 비행시간은 다음과 같이 계산할 수 있다.
- 필요 전력(W) = G/E
- E: 효율, G: 무게(gram), W: 와트
- 비행 시간(분) = (B/W)
- B: 배터리 용량, W: 와트
위의 예에서 필요 전력은 1000g/7 = 142.85W 이고, 배터리 전류 손실율을 70%로 설계하면 약 7.7분 정도의 비행 시간을 예상할 수 있다. ( (11 x 2.5 x 60m)/142.85 = 11.55m (약 11분))
8. 프로그래밍
교육용 프로그래밍으로는 아두이노 보드를 위한 아두이노 IDE 환경이 사용되며, 통신 API로는 오픈소스인 멀티위 시리얼 프로토콜(MSP)이 주로 사용된다.[49][50] 특히 블루투스나 와이파이를 통한 멀티위 확장 프로토콜인 MSP(Multiwii Serial Protocol)는 아두이노 보드인 FC와 무선조정장치(RC)를 서로 연동하는 무선 메시지를 주고받는 교환 프로토콜로 자주 사용된다.
산업용 및 연구용으로는 리눅스재단이 관여하고 있는 오픈소스인 아두파일럿의 드론코드(Drone Code) 프로젝트가 있으며, 이 계열인 아두콥터(arducopter)나 픽스호크(pixhawk) 하드웨어가 주로 사용되고 있다.[51] 통신 프로토콜로는 마브링크(MAVLink)를 사용한다.[52][53][54]
IDE로는 이클립스 (소프트웨어)가 있으며, 터미널에서 기트가 WAF 빌드를 지원하고 있다. 한편 펌웨어 로딩에는 빌드 도구 외에도 원격조정 프로그램인 큐그라운드컨트롤도 지원한다.[55][56][57]
9. 활용
쿼드콥터는 항공 촬영, 경기(레이싱) 등 다양한 분야에서 활용되고 있다.
- 항공촬영용
- * DJI - 팬텀 시리즈, 인스파이어 시리즈
- * 패럿(Parrot) - 비밥(Bebop) 시리즈, AR.드론 시리즈
- * 워커라(Walkera) - 에어리얼 드론(Voyager 3, Scout X4, QR X350)
- 경기용(쿼드 레이서)
- * 워커라(Walkera) - 레이싱 드론(Rodeo 150, F210, Furious 320, Runner 250)
- * ジーフォース - 레이서 드론[42]
2000년대 초반부터 소형 무인 항공기(드론) 분야에서 쿼드콥터 형태가 인기를 얻게 된 것은 향상된 조종성과 호버링 능력, 그리고 4개의 로터를 사용한 설계의 단순성, 높은 신뢰성과 조종성 때문이다.[17] 1999년 캐나다 신생 기업 드래건플라이(Draganfly Inc.)에서 카메라가 장착된 쿼드콥터 Draganflyer Stabilized Aerial Video System (Draganflyer I)을 생산한 이후,[18][19] 2005년에서 2010년 사이 전자 기술의 발전으로 저렴하고 가벼운 비행 컨트롤러, 가속도계(IMU), GPS, 카메라 생산이 가능해지면서 소형 무인 항공기에 쿼드콥터 구성이 널리 사용되게 되었다.[20][21]
소형 쿼드콥터는 기계적 단순성으로 인해 기존 헬리콥터보다 저렴하고 내구성이 뛰어나며,[22] 작은 블레이드는 운동 에너지가 적어 손상 가능성이 낮아 근접 상호 작용에 더 안전하다. 로터를 감싸는 보호대를 장착하여 안정성을 더욱 높일 수 도 있다.[23] 그러나 대형 쿼드콥터의 경우, 블레이드 크기가 커질수록 운동량이 증가하여 블레이드 속도 변화에 더 많은 시간이 걸려 제어가 어려워지는 단점이 있다. 반면 헬리콥터는 로터 디스크 크기가 커져도 블레이드 피치 제어 능력에 큰 영향을 받지 않아 이러한 문제가 발생하지 않는다.
쿼드콥터는 제작 및 제어가 용이하여 아마추어 모형 항공기 프로젝트로도 인기가 높다.[24][25]
9. 1. 자율 비행
쿼드콥터는 자율 비행을 위한 프로그래밍이 비교적 간단하여, 인접 드론의 기본적인 감지를 바탕으로 복잡한 군집 행동 실험을 가능하게 한다.다중 항공기 통신, 환경 탐사, 조종성 개선 등 쿼드콥터의 기능을 향상시키기 위한 연구가 계속되고 있으며, 이러한 발전된 특성들을 결합하면 쿼드콥터는 현재 다른 차량으로는 불가능한 고급 자율 임무를 수행할 수 있을 것이다.[17]
9. 2. 군사적 이용
2022년 러시아의 우크라이나 침공에서 레저용 및 상업용 드론이 우크라이나군과 러시아군에 의해 사용되기 시작했다. 처음에는 항공 및 위성 정찰 부족을 메우기 위해 사용되었지만, 점차 소형 폭격기 및 로이터링 무기로 사용이 증가하면서 "게임 체인저"로 묘사될 정도로 그 중요성이 커졌다.[26][27]9. 3. 범죄 활동
21세기 들어 쿼드콥터 드론이 범죄 활동에 사용된 사례가 보고되고 있다. 미국-멕시코 국경 장벽 건설로 인해 일부 마약 카르텔은 마약 밀수에 쿼드콥터를 사용하기 시작했다.[28] 쿼드콥터 드론은 국경을 넘어 마약뿐만 아니라 전 세계 교도소에 무기 및 기타 금지품을 밀반입하는 데에도 악용되고 있다.[29]쿼드콥터 드론을 이용한 범죄는 유럽에서도 발생하고 있다. 2021년 8월 체코 경찰관은 메탐페타민이 담긴 작은 봉투를 운반하던 쿼드콥터를 압수했다.[30]
9. 4. 기타 용도
2000년대 초반부터 쿼드콥터 형태는 소형 무인 항공기(드론)에 있어 인기를 얻게 되었다. 향상된 조종성과 호버링 능력은 쿼드콥터 연구 증가로 이어졌다. 4개의 로터 설계는 쿼드콥터가 설계상 비교적 단순하면서도 높은 신뢰성과 조종성을 갖추도록 한다. 다중 항공기 통신, 환경 탐사 및 조종성 개선을 통해 쿼드콥터의 기능을 향상시키기 위한 연구가 계속되고 있으며, 이러한 발전으로 쿼드콥터는 현재 다른 차량으로는 불가능한 고급 자율 임무를 수행할 수 있을 것이다.[17]1990년대 초 일본에서 소형 장난감 무선 조종 쿼드콥터가 생산되었지만, 카메라가 장착된 최초의 쿼드콥터가 상당한 수량으로 생산된 것은 1999년 캐나다 신생 기업 드래건플라이(Draganfly Inc.)의 Draganflyer Stabilized Aerial Video System (소급적으로 Draganflyer I)이었다.[18][19]
2005년에서 2010년 사이 전자 기술의 발전으로 저렴하고 가벼운 비행 컨트롤러, 가속도계(IMU), GPS 및 카메라를 생산할 수 있게 되었다. 이는 쿼드콥터 구성이 소형 무인 항공기에 인기를 얻게 된 결과를 가져왔다. 소형 크기와 조종성으로 인해 이러한 쿼드콥터는 실내외에서 모두 비행할 수 있다.[20][21]
소형 드론의 경우, 쿼드콥터는 기계적 단순성으로 인해 기존의 헬리콥터보다 저렴하고 내구성이 뛰어나다.[22] 또한 더 작은 블레이드는 운동 에너지가 적어 손상을 입힐 가능성이 줄어든다. 소형 쿼드콥터의 경우, 이는 차량이 가까운 상호 작용에 더 안전하도록 만든다. 로터를 감싸는 보호대를 쿼드콥터에 장착하여 손상 가능성을 더욱 줄일 수도 있다.[23] 그러나 크기가 커짐에 따라 고정 프로펠러 쿼드콥터는 기존 헬리콥터에 비해 단점을 보이는데, 블레이드 크기가 커지면 그 운동량이 커져 블레이드 속도 변화에 더 많은 시간이 걸려 제어에 악영향을 미친다. 헬리콥터는 로터 디스크 크기를 키운다고 해서 블레이드 피치 제어 능력에 큰 영향을 미치지 않기 때문에 이러한 문제가 발생하지 않는다.
제작 및 제어의 용이성으로 인해 쿼드콥터는 아마추어 모형 항공기 프로젝트로 인기를 얻고 있다.[24][25]
쿼드콥터는 다음과 같은 다양한 분야에서 활용되고 있다.
10. 드론 경기 대회
일반적으로 국제 드론 스포츠 대회나 국내 드론 레이싱 대회에서는 쿼드콥터를 주로 채택하고 있다.[58][59][60][61][62]
11. 법규 및 규제
멀티콥터의 법규제 문서를 참고하면, 법률 외에도 지방자치단체가 제정한 조례에 따라 비행이 금지될 수 있다.
12. 안전성
로터 4개 중 하나에 문제가 발생하기만 해도 추락으로 이어질 수 있으므로,[38] 항공 촬영 분야 등 안전성이 요구되는 산업 분야에서는 로터 수를 6개 또는 8개로 늘린 멀티콥터를 사용하는 것이 바람직하다.[39][40]
그 외에도 무선 통신 두절, 배터리 방전, 다운워시 및 급강하에 의한 양력 및 자세 제어 능력 상실 등의 문제가 있다.
대책으로 낙하산이 고안되었다.[41]
참조
[1]
웹사이트
How a Quadcopter works | Clay Allen
http://ffden-2.phys.[...]
University of Alaska, Fairbanks
2014-05-01
[2]
서적
Principles of Helicopter Aerodynamics
https://books.google[...]
Cambridge University Press
[3]
간행물
Historical Overview of V/STOL Aircraft Technology
https://ntrs.nasa.go[...]
[4]
웹사이트
Quadrotor
http://cog.yonsei.ac[...]
[5]
웹사이트
Quadcopters: Yaw
https://hoverbear.or[...]
hoverbear.org
[6]
웹사이트
Wyvern Quadrotor Helicopter
http://wyvernupenn.b[...]
2010-04-13
[7]
Youtube
151min30s FPV with Copter
https://www.youtube.[...]
2016-04-30
[8]
웹사이트
How Quadcopters Fly
https://www.spkdrone[...]
SPK Drones
[9]
뉴스
US Manufacturer Harris Aerial Launches New Hybrid Gas Electric Drone
https://dronelife.co[...]
Dronelife
2018-02-01
[10]
서적
The Helicopters
https://archive.org/[...]
Time-Life Books
[11]
뉴스
A Successful French Helicopter
http://www.flightglo[...]
1924-01-24
[12]
웹사이트
1956 - 1564 - Flight Archive
http://www.flightglo[...]
[13]
웹사이트
Patent US3261407 - Helicopter rotor system
https://patents.goog[...]
[14]
서적
The Seventh International Conference on Vibration Problems ICOVP 2005
https://books.google[...]
Springer
2007-01-20
[15]
서적
Gloster Aircraft Since 1917
Putnam
[16]
웹사이트
Airbus on track to fly its electric aerial taxi in 2018
https://techcrunch.c[...]
2017-10-05
[17]
웹사이트
Illumin - The Quadrotor's Coming of Age
http://illumin.usc.e[...]
2010-07-01
[18]
웹사이트
A Brief History of Quadrotors
https://www.airspace[...]
[19]
웹사이트
Our Story | Draganfly
https://www.draganfl[...]
[20]
학술대회
The Stanford Testbed of Autonomous Rotorcraft for Multi Agent Control (STARMAC)
2004-11-01
[21]
서적
Fascination Quadrocopter
Books on Demand
[22]
학술대회
Modelling and Control of a Quad-Rotor Robot
http://www.araa.asn.[...]
2006-12-01
[23]
학술대회
Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment
http://hoffmann.stan[...]
2007-08-20
[24]
웹사이트
How-To: Quadrocopter based on Arduino
http://blog.makezine[...]
[25]
웹사이트
FrontPage - UAVP-NG - The Open Source Next Generation Multicopter
http://ng.uavp.ch/mo[...]
[26]
웹사이트
How the Drone War in Ukraine Is Transforming Conflict
https://www.cfr.org/[...]
[27]
뉴스
How drone combat in Ukraine is changing warfare
https://www.reuters.[...]
[28]
웹사이트
Drug smugglers turn to drones, advancing operations
https://dronedj.com/[...]
2020-12-21
[29]
웹사이트
Věznice
https://eagle.one/cs[...]
[30]
뉴스
Strážník v Doksech rukama chytil neregistrovaný dron, který přenášel pervitin
https://ceskolipsky.[...]
2021-08-10
[31]
간행물
VTOL 実験機とその制御
https://doi.org/10.1[...]
計測自動制御学会
[32]
웹사이트
ダクテッドファン形VTOL実験機
http://www.robotics-[...]
[33]
간행물
無人航空機システム(ドローン)の歴史と技術発展
https://doi.org/10.1[...]
計測自動制御学会
2017-01-01
[34]
웹사이트
A Brief History of Quadrotors
https://www.smithson[...]
Smithsonian Magazine
[35]
웹사이트
スティングレイ500 フルセット
http://www.cyjapan.n[...]
CJ Youngblood Enterprises
[36]
웹사이트
マルチコプターとドローンの違いについて
http://diy-rc.jp/201[...]
DIY-RC.jp
2016-05-17
[37]
웹사이트
全自動飛行可能でパイロット不要の1人乗りマルチコプター「EHANG184」を中国のドローンメーカーが発表
https://gigazine.net[...]
GIGAZINE
2016-05-18
[38]
웹사이트
4モーターが危険な理由
http://www.04u.jp/ae[...]
株式会社 0
2016-05-17
[39]
웹사이트
8モーターが安全な理由
http://www.04u.jp/ae[...]
株式会社 0
2016-05-17
[40]
웹사이트
6モーターは危険?安全?
http://www.04u.jp/ae[...]
株式会社 0
2016-05-01
[41]
웹사이트
PARASAFE ドローンを安全に世界に安心を
https://parasafe.jp/
2024-12-24
[42]
웹사이트
プレスリリース:レーサードローン製品発売のお知らせ(Adobe PDF)
http://www.gforce-ho[...]
ジーフォース
2016-05-16
[43]
웹사이트
Arduino YunLin
https://www.arduino.[...]
[44]
블로그
아두이노로 비행제어유닛만들기1-회로도구성
https://blog.naver.c[...]
[45]
웹사이트
서보 모터가 무엇입니까.
http://www.mncautoma[...]
m&c automation
[46]
블로그
드론제작입문가이드1 쿼드콥터구성요소
https://blog.naver.c[...]
[47]
웹사이트
http://makeshare.org[...]
[48]
웹사이트
PID 시뮬레이션 데이타 시트
https://www.cs.cmu.e[...]
[49]
웹사이트
MultiWii Serial Protocol implementation for Arduino
https://github.com/f[...]
[50]
웹사이트
아두이노 안드로이드간 블루투스 FC
https://github.com/g[...]
[51]
웹사이트
드론코드 프로젝트
https://sdk.dronecod[...]
[52]
웹사이트
픽스호크
pixhawk.org
[53]
웹사이트
드론코드
https://github.com/A[...]
[54]
웹사이트
드론 시뮬레이션
http://ardupilot.org[...]
[55]
웹사이트
큐그라운드컨트롤
https://docs.qground[...]
[56]
웹사이트
Building ArduPilot
https://github.com/A[...]
[57]
웹사이트
Setting up the Build Environment
http://ardupilot.org[...]
[58]
웹사이트
한국드론협회
http://www.kdaa.org/
[59]
웹사이트
국제드론스포츠대회
http://www.idsc.co.k[...]
[60]
웹사이트
한국드론레이싱협회
http://kdra.org/
[61]
웹사이트
한국드론산업진흥협회
http://kodipa.org/
[62]
웹사이트
드론대회
http://kcdma.kr/them[...]
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com