비행 조종 시스템
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
비행 조종 시스템은 항공기의 조종면을 제어하여 비행을 가능하게 하는 장치이다. 1950년대 이전의 기계식 시스템에서 시작하여, 1970년대 전자식, 1980년대 디지털 시스템으로 발전하며 조종 성능과 안전성을 향상시켰다. 1990년대 이후에는 무인항공기 통합 비행 임무를 수행하는 데 활용된다. 조종석에는 조종 요크, 러더 페달, 스로틀 레버 등의 주 조종 장치와 엘리베이터 트림, 플랩과 같은 보조 조종 장치가 있다. 비행 조종 시스템은 기계식, 유압-기계식, 파워-바이-와이어, 플라이-바이-와이어 시스템으로 구분되며, 미래에는 가변익 및 능동 유동 제어 기술을 통해 성능 향상을 모색하고 있다. 비행 조종 시스템은 안전성 기준을 충족해야 하며, PLOC 지표 등을 통해 안전성을 평가한다.
더 읽어볼만한 페이지
- 항공기 조종 - 플랩
플랩은 항공기 날개에 장착되어 이착륙 시 양력을 증가시키는 장치로, 낮은 속도에서 양력을 발생시켜 안전한 이착륙을 돕고 이착륙 거리를 단축하며, 항공기 종류에 따라 다양한 형태로 존재한다. - 항공기 조종 - 플래퍼론
플래퍼론은 에일러론처럼 롤 제어를 하면서 플랩처럼 양쪽을 내려 실속 속도를 줄이는 장치로, 무게, 비용, 항력을 줄이고 스텔스 기능 강화에 기여할 수 있지만 복잡한 구조, 안전 문제, 높은 비용 등의 기술적 한계도 존재하여 무인 항공기 및 차세대 전투기 개발에 적용하기 위한 연구가 진행 중이다. - 항공전자 - 무인 항공기
무인 항공기는 조종사 없이 자율 또는 원격 조종으로 비행하는 동력 비행체로, 다양한 기준으로 분류되어 군사 및 민간용으로 활용되지만 안전 및 보안 위협, 사이버 공격, 악의적 사용 가능성 등의 문제점도 존재한다. - 항공전자 - TACAN
TACAN(태켄)은 항공기의 방위와 거리를 동시에 측정하는 항법 시스템으로, UHF 대역을 사용하여 VOR/DME 시스템의 기능을 통합했으며, 함선이나 차량에도 설치 가능하고, 거리 측정 기능은 민간에서 VORTAC으로 사용되지만, GPS 기술 발전으로 중요성은 감소하고 백업 시스템으로서의 역할이 유지될 전망이다.
| 비행 조종 시스템 | |
|---|---|
| 개요 | |
| 유형 | 장치 |
| 목적 | 항공기 방향 및 자세 제어 |
| 주요 구성 요소 | |
| 조종 장치 | 조종간 조종면 케이블 푸시로드 활차 작동기 |
| 조종면 | |
| 주요 조종면 | 에일러론 엘리베이터 (항공) 방향타 (항공) |
| 보조 조종면 | 플랩 (항공) 슬랫 (항공) 스포일러 (항공) 트림 탭 |
| 작동 방식 | |
| 전통적인 시스템 | 조종 장치에서 조종면으로 직접 연결 |
| 플라이-바이-와이어 시스템 | 전자 신호를 통해 조종면 제어 |
| 추가 정보 | |
| 관련 기술 | 자동 조종 장치 요댐퍼 추력 벡터링 |
2. 역사
비행 조종 장치는 기술 발전에 따라 여러 단계를 거쳐 발전해 왔다. 1950년대 이전에는 조종사의 조작력을 기계적으로 전달하는 기계식 비행 조종 장치가 주를 이루었다. 1970년대에 들어서는 아날로그 컴퓨터를 활용한 전자식 비행 조종 장치가 도입되어 시스템의 신뢰성을 일부 확보하기 시작했다.
1980년대에는 디지털 컴퓨터 기술을 기반으로 한 전자식(디지털) 비행 조종 장치가 개발되었다. 이는 항공기의 조종 성능과 비행 성능을 크게 향상시켰으며, 조종사의 부담을 줄이고 항공기 운용 목적에 맞는 비행 특성을 능동적으로 구현하여 신뢰성과 안전성을 높였다.
1990년대 이후, 항공 기술 선진국들은 기존 전자식 비행 제어 방식에 자동 이착륙 및 원격 조종 기술을 통합하여 무인항공기의 통합 비행 임무 수행 능력을 발전시키고 있다. 이러한 시스템에서는 비행 조종 컴퓨터가 항공기 조종의 핵심 역할을 담당하므로, 실제 비행 전 철저한 시험과 검증이 필수적이다.
2. 1. 기계식 비행 조종 장치 (1950년대 이전)

기계식 또는 수동식 비행 제어 시스템은 항공기를 제어하는 가장 기본적인 방법이다. 1950년대 이전의 초기 항공기에서 주로 사용되었으며, 현재는 공기역학적 힘이 상대적으로 크지 않은 소형 항공기에서 찾아볼 수 있다.[5]
이 시스템은 조종석에서의 조작력을 푸시로드, 텐션 케이블, 풀리, 카운터웨이트 및 때로는 체인과 같은 순수 기계 부품들을 통해 제어면에 직접 전달하는 방식으로 작동한다. 턴버클은 종종 제어 케이블의 장력을 정밀하게 조정하는 데 사용된다. 세스나 스카이호크는 이러한 기계식 시스템을 사용하는 대표적인 현대 소형 항공기의 예시다.[6]
라이트 플라이어 I, 블레리오 XI, 포커 아인데커와 같은 아주 초기의 항공기들은 오늘날 일반적인 경첩식 제어면 대신 날개 뒤틀림(wing warping) 방식을 사용하여 비행 방향을 제어했다. 심지어 라이트 플라이어 I과 1909년형 에트리히 타우베는 기수를 올리고 내리는 피치 제어에도 날개 뒤틀림을 사용했으며, 에트리히 타우베는 피치와 롤 제어를 날개 뒤틀림으로 하고, 방향 제어만 경첩식 방향타를 사용했다.[5]
기계식 시스템을 갖춘 항공기가 지상에 주차되어 있을 때는 바람에 의해 제어면이나 연결 부위가 손상되는 것을 막기 위해 너울 잠금(gust lock) 장치를 사용하기도 한다. 일부 항공기는 이 너울 잠금 장치가 제어 시스템 내부에 통합되어 있기도 하다.[6]
항공기의 크기가 커지고 비행 속도가 빨라짐에 따라, 제어면이 받는 공기역학적 힘(공력 하중)도 크게 증가했다. 이로 인해 조종사가 제어면을 움직이는 데 필요한 힘도 상당히 커지게 되었다. 이러한 문제를 해결하고 조종사가 더 적은 힘으로 항공기를 조종할 수 있도록, 기계적 이점을 극대화하는 복잡한 기계식 기어 장치들이 개발되었다.[7] 이러한 발전된 기계식 시스템은 포커 50과 같은 비교적 크거나 성능이 높은 프로펠러 항공기에서 볼 수 있다.
일부 기계식 비행 제어 시스템은 공력 보조 장치인 서보 탭(servo tab)을 활용한다. 서보 탭은 주 제어면(예: 승강타, 방향타, 에일러론)의 뒷부분에 경첩으로 달린 작은 보조 제어면이다. 조종사가 조종 장치를 움직이면 먼저 이 서보 탭이 움직이고, 서보 탭이 받는 공기의 힘이 주 제어면을 원하는 방향으로 움직이도록 돕거나 직접 움직여준다. 이를 통해 조종에 필요한 물리적인 힘을 크게 줄일 수 있다. 이 방식은 초기 대형 왕복 엔진 여객기나 초기 제트 여객기 등에서 사용되었다.[8] 보잉 737 항공기는 유압 시스템이 완전히 고장 나는 비상 상황에 대비하여, 자동으로 서보 탭을 이용한 제어 방식으로 전환되는 시스템을 갖추고 있다.
2. 2. 전자식 비행 조종 장치 (1970년대)
1970년대에는 아날로그 컴퓨터를 이용한 전자식 비행 조종 장치가 채택되었다. 이 방식은 이전의 기계식 조종 장치에 비해 일정 수준의 신뢰성을 확보하는 단계로 발전했다.2. 3. 디지털 비행 조종 장치 (1980년대)
1970년대에 아날로그 컴퓨터를 이용한 전자식 비행 조종 장치가 도입되어 일부 신뢰성을 확보한 데 이어, 1980년대에는 디지털 컴퓨터 기술을 기반으로 한 전자식(디지털) 비행 조종 장치가 개발되었다. 이 새로운 시스템은 항공기의 조종 성능과 비행 성능을 더욱 향상시키는 것을 목표로 했다.전자식(디지털) 비행 조종 장치의 도입은 조종사의 작업 부담(workload)을 경감시켰다. 또한, 항공기의 운용 목적에 맞추어 비행 특성을 더욱 능동적으로 구현할 수 있게 되었으며, 이를 통해 신뢰성과 안전성을 보장하게 되었다.
2. 4. 무인항공기 통합 비행 임무 (1990년대 이후)
1990년대 이후 항공 선진국에서는 전자식 비행제어 방식에 자동 이착륙 제어, 원격 조종 제어 기술을 추가하여 무인항공기 통합 비행임무를 수행하도록 발전시키고 있다. 이러한 시스템에서 전자식(디지털) 비행조종컴퓨터는 항공기 조종의 모든 권한을 가지게 된다. 따라서 비행조종장치의 오작동으로 인한 비행 사고를 방지하기 위해서는 실제 무인항공기에 탑재하여 첫 비행을 하기 전에 완벽한 시험 및 검증 과정이 반드시 필요하다.3. 조종석 조종 장치
항공기 조종석 내부에는 비행을 제어하기 위한 다양한 장치들이 있다. 이들은 크게 항공기의 기본적인 자세와 방향을 조종하는 '''주 조종 장치'''와 조종사의 부담을 줄이거나 특정 상황에서의 조종을 돕는 '''보조 조종 장치'''로 구분할 수 있다.[2]
일반적으로 주 조종 장치에는 항공기의 기울기(롤)와 상승/하강(피치)을 제어하는 조종 요크, 센터 스틱, 또는 사이드 스틱이 있으며, 항공기의 방향(요)을 제어하는 러더 페달, 그리고 엔진의 추력을 조절하는 스로틀 레버가 포함된다. 보조 조종 장치로는 특정 비행 자세를 유지하도록 돕는 트림 장치, 이착륙 시 날개 형태를 변경하여 양력을 조절하는 플랩, 그리고 슬랫, 스포일러, 에어 브레이크 등이 있다.
각 조종 장치의 구체적인 기능과 종류, 작동 방식 등 자세한 내용은 아래 하위 문서를 참고할 수 있다.
3. 1. 주 조종 장치

일반적으로 항공기의 주 조종 장치는 다음과 같이 구성된다.[2]
- '''조종 요크''' (조종간), '''센터 스틱''', 또는 '''사이드 스틱''': 이 장치들은 좌우로 움직여 에일러론을 조작하거나(초기 항공기에서는 윙 워핑 방식 사용), 항공기의 롤(roll)을 제어한다. 앞뒤로 움직이면 승강타를 조작하여 항공기의 피치(pitch)를 제어한다. 조종 요크, 센터 스틱, 사이드 스틱 모두 조종간 또는 조이스틱이라고도 불린다.
- '''러더 페달''' (1919년 이전에는 "러더 바"): 발로 조작하여 러더를 움직여 항공기의 요(yaw)를 제어한다. 예를 들어 왼쪽 페달을 앞으로 밀면 러더가 왼쪽으로 움직인다.
- '''스로틀 레버''' 또는 '''스로틀''': 동력 항공기의 엔진 속도나 추력을 조절한다.
조종 방식은 항공기마다 다양하다. 조종 요크의 경우, 자동차 핸들처럼 시계 방향/반시계 방향으로 돌려 롤을 제어하고, 조종사를 기준으로 앞뒤로 밀거나 당겨 피치를 제어하는 방식이 일반적이다. 하지만 세스나 152나 세스나 172처럼 계기판 쪽으로 밀거나 당겨 피치를 제어하는 요크도 있고, 세스나 162처럼 요크 전체를 좌우로 밀어 롤을 제어하는 방식도 있다. 센터 스틱 역시 항공기에 따라 다른데, 케이블을 이용해 조종면과 직접 연결되는 방식[3]과, 플라이 바이 와이어 시스템처럼 컴퓨터를 통해 전기 액추에이터를 제어하는 방식이 있다.

항공기가 V-테일 러더베이터, 플래퍼론, 엘리본과 같이 여러 기능을 합친 조종면을 사용하더라도, 기본적인 조종 원리는 동일하다. 즉, 스틱이나 요크로 피치와 롤을 제어하고, 러더 페달로 요를 제어하도록 설계된다.[2] 현대 비행 조종 장치의 기본 형태는 프랑스 항공 개척자인 로베르 에스노-펠테리에 의해 처음 만들어졌다. 이후 프랑스 비행사 루이 블레리오가 1908년 자신의 블레리오 VIII 단엽기에 이 방식을 적용하여 처음 선보였고, 1909년 영국 해협을 횡단한 블레리오 XI 모델에서 표준화시켰다. 이러한 조종 방식은 볼프강 랑게비셰가 1944년에 쓴 저서 스틱 앤 러더와 같은 교재를 통해 수십 년간 교육되어 왔다.
일부 초경량 항공기나 동력 행글라이더처럼 조종 장치가 연결 장치 없이 단순화된 경우도 있다. 이런 항공기에서는 조종사가 직접 날개(보통 아래에 달린 단단한 프레임)를 손으로 잡고 움직여 방향을 바꾼다.
3. 2. 보조 조종 장치
기울기, 피치, 요를 제어하는 주 조종 장치 외에도, 조종사가 비행을 더 정밀하게 제어하거나 조종 부담을 줄일 수 있도록 돕는 보조 조종 장치가 있다. 가장 흔한 보조 조종 장치 중 하나는 승강키 트림 제어 장치이다. 이는 보통 휠이나 다른 형태의 장치로 되어 있으며, 조종사가 특정 항공기 자세를 유지하기 위해 계속해서 조종간에 힘을 가할 필요가 없도록 돕는다.[4] 러더나 에일러론에 대한 트림 장치도 있는데, 주로 대형 항공기에서 볼 수 있지만 소형 항공기에도 장착되기도 한다.많은 항공기에는 플랩이 장착되어 있다. 플랩은 스위치나 레버로 조작하며, 때로는 컴퓨터 제어를 통해 자동으로 작동하기도 한다. 플랩은 날개 모양을 변경하여 이륙 및 착륙 시 느린 속도에서 항공기 제어를 향상시키는 역할을 한다. 그 외 다른 보조 조종 장치로는 슬랫, 스포일러, 에어 브레이크, 가변익 등이 있다.
4. 비행 조종 시스템
비행 조종 시스템은 조종사가 항공기를 제어하는 데 사용하는 기본적인 수단이다. 이 시스템은 조종석의 조작 장치에서 발생한 입력을 항공기의 제어면으로 전달하여 항공기의 자세와 방향을 변경한다. 비행 조종 시스템은 작동 방식에 따라 여러 종류로 나눌 수 있다.
가장 기본적인 형태는 기계식 비행 조종 시스템이다. 이 방식은 주로 공기역학적 힘이 크지 않은 소형 항공기나 초기 항공기에서 사용되었다.[5] 조종석의 조작과 제어면이 케이블, 푸시로드, 풀리 등 기계적인 부품으로 직접 연결되어 힘을 전달하는 방식이다.[6]
항공기의 크기가 커지고 속도가 빨라짐에 따라 제어면에 가해지는 힘이 증가하면서, 조종사가 더 적은 힘으로 항공기를 조종할 수 있도록 유압-기계식 비행 조종 시스템이 개발되었다.[7] 이 시스템은 기계적인 연결 장치와 함께 유압 시스템을 사용하여 조종력을 증폭시킨다. 조종사의 조작은 기계 회로를 통해 유압 밸브를 제어하고, 유압 동력이 액추에이터를 움직여 제어면을 작동시키는 원리이다.[9] 유압 시스템의 도입으로 조종사의 물리적인 힘의 한계를 넘어 더 크고 빠른 항공기의 설계가 가능해졌다.
4. 1. 기계식 시스템
기계식 또는 수동식 비행 제어 시스템은 항공기를 제어하는 가장 기본적인 방법이다. 초기 항공기에서 사용되었으며, 현재는 공기역학적 힘이 크지 않은 소형 항공기에서 주로 사용된다. 라이트 플라이어 I, 블레리오 XI, 포커 아인데커와 같은 초기 항공기들은 날개에 기존의 경첩식 제어면 대신 날개 뒤틀림 방식을 사용하기도 했다. 심지어 라이트 플라이어 I과 1909년 초판 에트리히 타우베는 피치 제어에도 날개 뒤틀림을 사용했으며, 에트리히 타우베는 날개 뒤틀림을 이용한 피치 및 롤 제어 외에 경첩식 방향타만 가지고 있었다.[5]
수동 비행 제어 시스템은 푸시로드, 텐션 케이블, 풀리, 카운터웨이트, 때로는 체인과 같은 기계 부품을 사용하여 조종석 제어 장치에 가해지는 힘을 제어면에 직접 전달한다. 턴버클은 종종 제어 케이블의 장력을 조절하는 데 사용된다. 세스나 스카이호크는 이러한 유형의 시스템을 사용하는 대표적인 항공기이다. 너울 잠금은 기계식 시스템을 갖춘 주차된 항공기에서 바람으로부터 제어면과 연결 장치를 보호하기 위해 자주 사용된다. 일부 항공기에는 제어 시스템의 일부로 너울 잠금 장치가 장착되어 있기도 하다.[6]
항공기가 커지고 속도가 빨라지면서 제어면의 면적이 증가하고 더 높은 공기역학적 하중이 발생하게 되었다. 이로 인해 제어면을 움직이는 데 필요한 힘도 상당히 커졌다. 따라서 조종사가 필요한 힘을 줄이기 위해 최대의 기계적 이점을 얻도록 복잡한 기계적 기어 배열이 개발되었다.[7] 이러한 배열은 포커 50과 같은 더 크거나 고성능 프로펠러 항공기에서 찾아볼 수 있다.
일부 기계식 비행 제어 시스템은 공기역학적 지원을 제공하는 서보 탭을 사용한다. 서보 탭은 제어면에 경첩으로 연결된 작은 표면이다. 비행 제어 메커니즘은 이 탭을 움직이고, 탭에 작용하는 공기역학적 힘이 제어면의 움직임을 돕거나 직접 움직여 필요한 기계적 힘의 양을 줄인다. 이 방식은 초기 왕복 엔진 수송 항공기와 초기 제트 수송기에 사용되었다.[8] 보잉 737은 유압 시스템이 완전히 고장 나는 드문 경우에 자동으로 서보 탭을 통해 제어되도록 전환되는 시스템을 갖추고 있다.
4. 2. 유압-기계식 시스템
기계식 비행 제어 시스템은 항공기의 크기와 성능이 커짐에 따라 복잡성과 무게가 상당히 증가하는 단점이 있다. 이러한 한계를 극복하기 위해 유압 구동 제어면을 사용하는 유압-기계식 시스템이 개발되었다. 유압 시스템을 통해 조종사는 적은 힘으로도 큰 제어력을 발휘할 수 있게 되었고, 항공기의 크기와 성능은 조종사의 물리적인 힘보다는 경제성에 의해 더 크게 좌우되게 되었다. 초기에는 조종사가 제어면의 공기역학적 하중(피드백)을 어느 정도 느낄 수 있도록 부분적으로만 유압의 도움을 받는 시스템이 사용되기도 했다.[7]
유압-기계식 비행 제어 시스템은 크게 두 부분으로 구성된다.
- '''기계 회로''': 조종석의 조종 장치와 유압 회로를 물리적으로 연결한다. 기존의 기계식 시스템처럼 로드, 케이블, 풀리, 때로는 체인 등으로 이루어진다.
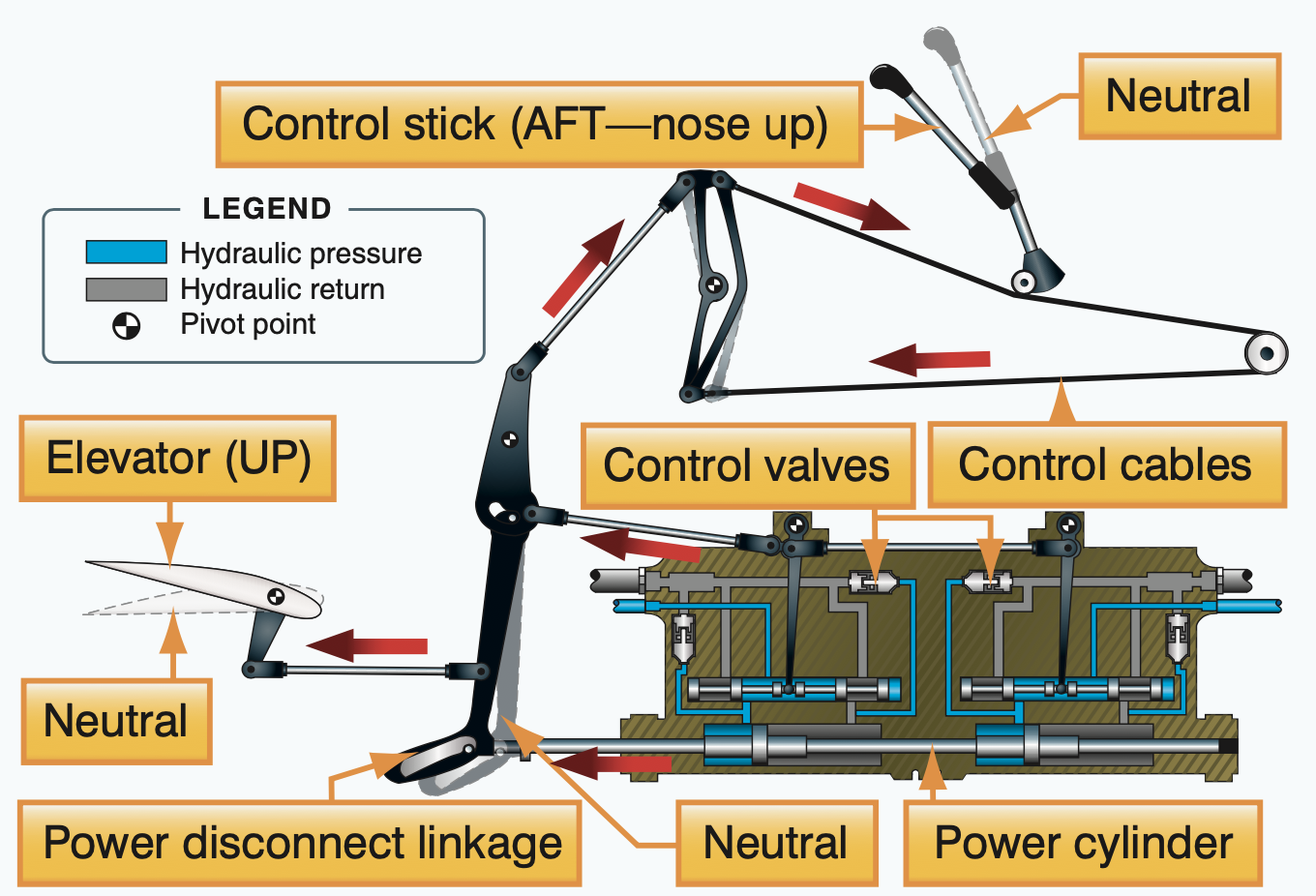
- '''유압 회로''': 유압 펌프, 저장조, 필터, 파이프, 밸브, 액추에이터 등으로 구성된다. 유압 펌프가 만들어낸 유압 동력을 이용하여 액추에이터를 작동시킨다. 액추에이터는 이 유압 동력을 제어면을 움직이는 물리적인 힘으로 변환한다. 이때 전기 유압 서보 밸브가 액추에이터의 움직임을 정밀하게 제어하는 역할을 한다.
조종사가 조종간이나 페달을 움직이면, 이 움직임은 기계 회로를 통해 유압 회로에 있는 해당 서보 밸브로 전달되어 밸브를 연다. 열린 밸브를 통해 유압이 액추에이터로 흘러 들어가 동력을 공급하고, 액추에이터는 연결된 제어면을 움직인다. 제어면이 원하는 위치까지 움직이면, 액추에이터의 움직임과 연결된 기계적 피드백 장치가 서보 밸브를 다시 닫아 제어면의 움직임을 멈추게 한다.
이러한 유압-기계식 시스템은 과거의 제트 수송기나 일부 고성능 항공기에서 찾아볼 수 있다. 대표적인 예로는 안토노프 An-225 수송기와 록히드 SR-71 정찰기가 있다.
4. 2. 1. 인공 감각 장치
순전히 기계식 비행 조종 시스템의 경우, 제어 표면에 가해지는 공기역학적 힘이 기계 장치를 통해 전달되어 조종사가 직접 감지할 수 있으며, 이를 통해 속도에 대한 촉각적 피드백을 얻을 수 있다. 하지만 유압 기계식 비행 제어 시스템에서는 유압 장치가 힘을 증폭하여 전달하기 때문에, 조종사가 제어 표면에 가해지는 하중을 직접 느끼기 어렵다. 이로 인해 조종사가 자신도 모르게 제어 표면을 과도하게 움직여 항공기에 과부하가 걸릴 위험이 있다.이러한 문제를 해결하기 위해 인공 감각(artificial feel) 시스템을 사용한다. 이 시스템은 비행 속도나 항공기의 기동 상태에 따라 조종간이나 페달에 인위적인 저항력을 만들어 조종사에게 적절한 조종 감각, 즉 피드백을 제공한다. 예를 들어, 영국 공군(RAF)의 아브로 벌컨 제트 폭격기와 캐나다 공군(RCAF)의 아브로 캐나다 CF-105 애로우 초음속 요격기(둘 다 1950년대 설계)의 조종 장치에서는 스프링 장치를 통해 필요한 힘 피드백을 구현했다.[10] 이 장치는 지렛대 원리를 이용하여, 비행 속도가 높아질수록 속도의 제곱에 비례하여 조종간(특히 승강타 제어)의 저항을 증가시켰다. 미국의 보트 F-8 크루세이더와 LTV A-7 콜세어 II 전투기의 조종 장치에서는 조종간의 피치 축에 '보브 웨이트'(bob-weight)라는 추를 사용하여, 비행기의 수직 가속도에 비례하는 힘 피드백을 제공하기도 했다.
4. 2. 2. 스틱 셰이커 (Stick shaker)
스틱 셰이커는 일부 유압 항공기의 조종간에 부착된 장치이다. 이 장치는 항공기가 실속 상태에 가까워지면 조종간을 흔들어 조종사에게 위험을 경고하는 역할을 한다. 예를 들어, 맥도넬 더글러스 DC-10과 같은 일부 항공기에는 유압 시스템에 문제가 생겼을 때 스틱 셰이커를 작동시키기 위한 백업 전기 전원 공급 장치가 마련되어 있기도 하다.[11]4. 3. 파워-바이-와이어 (Power-by-wire) 시스템
기존의 많은 항공기 제어 시스템은 고압의 유압 시스템을 통해 제어 액추에이터에 동력을 공급한다. 플라이 바이 와이어 시스템에서는 이러한 유압 시스템을 제어하는 밸브를 전기 신호로 작동시킨다. 파워-바이-와이어 시스템은 여기서 더 나아가, 유압 피스톤 대신 전기 액추에이터를 직접 사용한다. 동력은 유압 파이프가 아닌 전기 케이블을 통해 액추에이터로 전달된다. 이 방식은 유압 파이프를 사용하는 것보다 가볍고, 설치 및 유지 관리가 더 쉬우며, 신뢰성도 더 높다는 장점이 있다.F-35 전투기의 비행 제어 시스템 일부는 파워-바이-와이어 방식을 채택하고 있다.[12][13][14] 이러한 시스템에 사용되는 전기-유압식 구동(Electro-Hydrostatic Actuator, EHA) 액추에이터는 자체적으로 유압유와 펌프 등을 내장한 작은 폐쇄 회로 유압 시스템으로 작동한다. 파워-바이-와이어 시스템의 도입은 궁극적으로 더 많은 부분을 전기로 작동하는 항공기(More Electric Aircraft)나 완전 전동화된 항공기(All Electric Aircraft)를 개발하려는 목표와 관련이 있다. 이러한 접근 방식의 초기 사례로는 영국의 폭격기인 Avro Vulcan이 있으며, 에어버스 A380 여객기에도 이 시스템의 적용이 진지하게 검토된 바 있다.[15]
4. 4. 플라이-바이-와이어 (Fly-by-wire) 시스템
플라이 바이 와이어(FBW) 시스템은 항공기의 수동 비행 제어를 전자 인터페이스로 대체하는 방식이다. 조종 장치의 움직임은 전선(따라서 '플라이 바이 와이어'라는 용어가 사용됨)을 통해 전달되는 전기 신호로 변환된다. 이 신호를 받은 비행 제어 컴퓨터는 원하는 비행 상태를 만들기 위해 각 조종면의 액추에이터를 어떻게 움직일지 결정한다. 컴퓨터는 조종사가 인지하지 못하는 사이에도 항공기를 안정시키거나 다른 필요한 작업을 수행하기 위한 명령을 내릴 수 있다. 항공기 비행 제어 시스템에 사용되는 전자 장비들은 항공전자 분야에 속한다.플라이 바이 옵틱스(Fly-by-optics)는 '플라이 바이 라이트(Fly-by-light)'라고도 불리며, 전기 신호 대신 광섬유 케이블을 통해 빛 신호를 전달하는 방식으로, 플라이 바이 와이어 시스템에서 한 단계 더 발전한 기술이다.
5. 미래 기술 연구
다양한 기술 연구 및 개발 노력을 통해 기존의 에일러론, 승강타, 엘레본, 플랩, 플래퍼론과 같은 여러 비행 제어 시스템의 기능을 날개 자체에 통합하려는 시도가 이루어지고 있다. 이는 항공기의 질량, 비용, 항력, 관성을 줄이고, 구조적 복잡성을 낮추며(기계적으로 더 단순화, 움직이는 부품 수 감소, 유지보수 용이성 증가), 레이더 단면적 감소를 통해 스텔스 성능을 높이는 것을 목표로 한다. 이러한 통합 제어 기술은 특히 많은 무인 항공기(UAV)와 차세대 6세대 전투기 개발에 중요한 요소로 고려되고 있다. 주요 연구 방향으로는 날개 형태를 바꾸는 가변익 기술과 공기 흐름을 직접 제어하는 능동 유동 제어 기술 등이 있다.
5. 1. 가변익 (Flexible wings)
가변익(Flexible wings)은 날개 표면의 전체 또는 대부분이 비행 중에 형태를 바꾸어 공기의 흐름을 제어하는 기술이다. 이는 마치 조류형 비행기처럼 날개를 움직여 비행하는 원리와 유사하다. 이 기술은 기존의 에일러론, 승강타, 엘레본, 플랩, 플래퍼론과 같은 여러 조종면의 기능을 날개 자체에 통합하려는 시도의 일환이다. 이를 통해 항공기의 무게, 제작 비용, 공기 저항, 관성을 줄이고, 구조를 단순화하며(움직이는 부품 감소, 유지보수 용이성 증가), 레이더 단면적을 줄여 스텔스 성능을 높이는 것을 목표로 한다. 이러한 장점 때문에 가변익 기술은 많은 무인 항공기(UAV)와 차세대 6세대 전투기에 적용될 가능성이 있다.가변익 기술 연구의 대표적인 예로는 적응형 순응 날개(Adaptive compliant wing)가 있으며, 군사 및 상업 분야 모두에서 연구가 진행 중이다.[16][17][18] 미국 공군, NASA, 보잉(Boeing)은 공동으로 X-53 액티브 공탄성 날개 프로젝트를 진행하여 이 기술을 연구했다. 또한, FlexSys 사는 걸프스트림 III 항공기의 날개를 가변 에어포일 형태로 개조하여 비행 시험을 수행하는 등 주목할 만한 성과를 보였다.[19]
5. 2. 능동 유동 제어 (Active Flow Control)
능동 유동 제어(Active Flow Control, AFC)는 항공기의 공기 흐름을 능동적으로 제어하여 비행을 조종하는 기술이다. 이 기술은 순환 제어(circulation control) 원리를 이용하여, 기존의 에일러론, 승강타, 플랩과 같은 복잡하고 무거운 기계식 조종면 대신, 더 작고 간단한 유체 시스템(예: 공기 흐름을 방출하거나 흡입하는 슬롯)으로 항공기를 제어한다.[20][21] 즉, 유체 내의 큰 힘(공력)을 작은 제트나 유체 흐름의 간헐적인 변화를 통해 제어하여 항공기의 방향을 바꾸는 방식이다.능동 유동 제어 기술은 다음과 같은 장점을 가질 것으로 기대된다.
- 단순성 및 경량화: 움직이는 부품 수를 줄여 시스템 복잡성을 낮추고 무게를 줄일 수 있다.
- 비용 절감: 제작 및 유지보수 비용을 절감할 수 있다 (최대 절반까지 감소 가능).
- 항력 감소: 돌출된 조종면이 줄어들어 공기 저항을 줄일 수 있다.
- 성능 향상: 관성이 적어 더 빠르고 강력한 제어 응답이 가능하다.
- 스텔스 성능: 외부로 돌출되는 조종면을 줄여 레이더 단면적을 감소시키고 스텔스 성능을 높일 수 있다.
이러한 장점 때문에 능동 유동 제어 기술은 무인 항공기(UAV)나 6세대 전투기와 같은 차세대 항공기 개발에 중요한 기술로 주목받고 있다. 영국의 데몬 무인 항공기는 2010년 9월 첫 비행에서 이 기술을 성공적으로 시연한 바 있다.[22]
6. 안전성 요구도
비행 조종 시스템의 고장은 항공기 손실이나 조종사의 사망과 같은 치명적인 결과를 초래할 수 있으므로, 매우 높은 수준의 안전성이 요구된다. 이러한 위험 수준을 관리하고 평가하기 위한 지표 중 하나로 PLOC(Probability of Loss of Control)가 사용되는데, 이는 항공기의 조종 기능이 상실될 확률을 나타낸다.[1] 참고로 미 공군에서는 안전성 기준으로 10만 비행 시간당 1.5건의 사고(mishap) 발생률을 제시하기도 한다.[1] 대한민국 역시 국제 기준에 부합하는 항공 안전성 확보를 위해 지속적으로 노력하고 있으며, 이는 항공 안전 강화를 위한 사회적, 정치적 관심으로도 이어지고 있다.
7. 하드웨어
비행 조종 시스템을 구성하는 주요 하드웨어 요소는 다음과 같다.
참조
[1]
서적
Blériot XI, The Story of a Classic Aircraft
Smithsonian Institution Press
[2]
서적
Stick and Rudder: An Explanation of the Art of Flying
https://books.google[...]
McGraw-Hill Professional
[3]
웹사이트
Control surfaces directly controlled using cables
http://www.centennia[...]
2017-01-25
[4]
문서
Thom,1988. p. 87.
[5]
문서
Taylor, 1990. p. 116.
[6]
문서
Thom,1988. p. 153.
[7]
문서
Taylor, 1990. p. 118.
[8]
문서
Thom,1988. p. 86.
[9]
서적
Pilot's Handbook of Aeronautical Knowledge
Federal Aviation Administration
2016-08-24
[10]
문서
The Arrowheads, pages 57-58, 83-85 (for CF-105 Arrow only).
[11]
간행물
Regarding Pilot Usage of Display Technologies for Improving Awareness of Aircraft System States
https://ntrs.nasa.go[...]
[12]
웹사이트
Power-By-Wire - Avionics
https://www.aviation[...]
2001-05
[13]
간행물
Review on signal-by-wire and power-by-wire actuation for more electric aircraft
[14]
간행물
C-141 and C-130 power-by-wire flight control systems - IEEE Conference Publication
1991-05
[15]
웹사이트
A380: 'More Electric' Aircraft - Avionics
https://www.aviation[...]
2001-10
[16]
뉴스
Morphing Wings
http://www.aviationw[...]
2006-11-27
[17]
웹사이트
FlexSys Inc.: Aerospace
http://www.flxsys.co[...]
2011-04-26
[18]
웹사이트
Mission Adaptive Compliant Wing – Design, Fabrication and Flight Test
http://www.flxsys.co[...]
FlexSys Inc., Air Force Research Laboratory
2011-04-26
[19]
웹사이트
FlexFoil
https://www.flxsys.c[...]
2022-01-22
[20]
간행물
The flapless air vehicle integrated industrial research (FLAVIIR) programme in aeronautical engineering
http://journals.pepu[...]
London: Mechanical Engineering Publications
[21]
웹사이트
Showcase UAV Demonstrates Flapless Flight
http://www.baesystem[...]
BAE Systems
2010-12-22
[22]
뉴스
Demon UAV jets into history by flying without flaps
http://www.metro.co.[...]
Associated Newspapers Limited
2010-09-28
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com