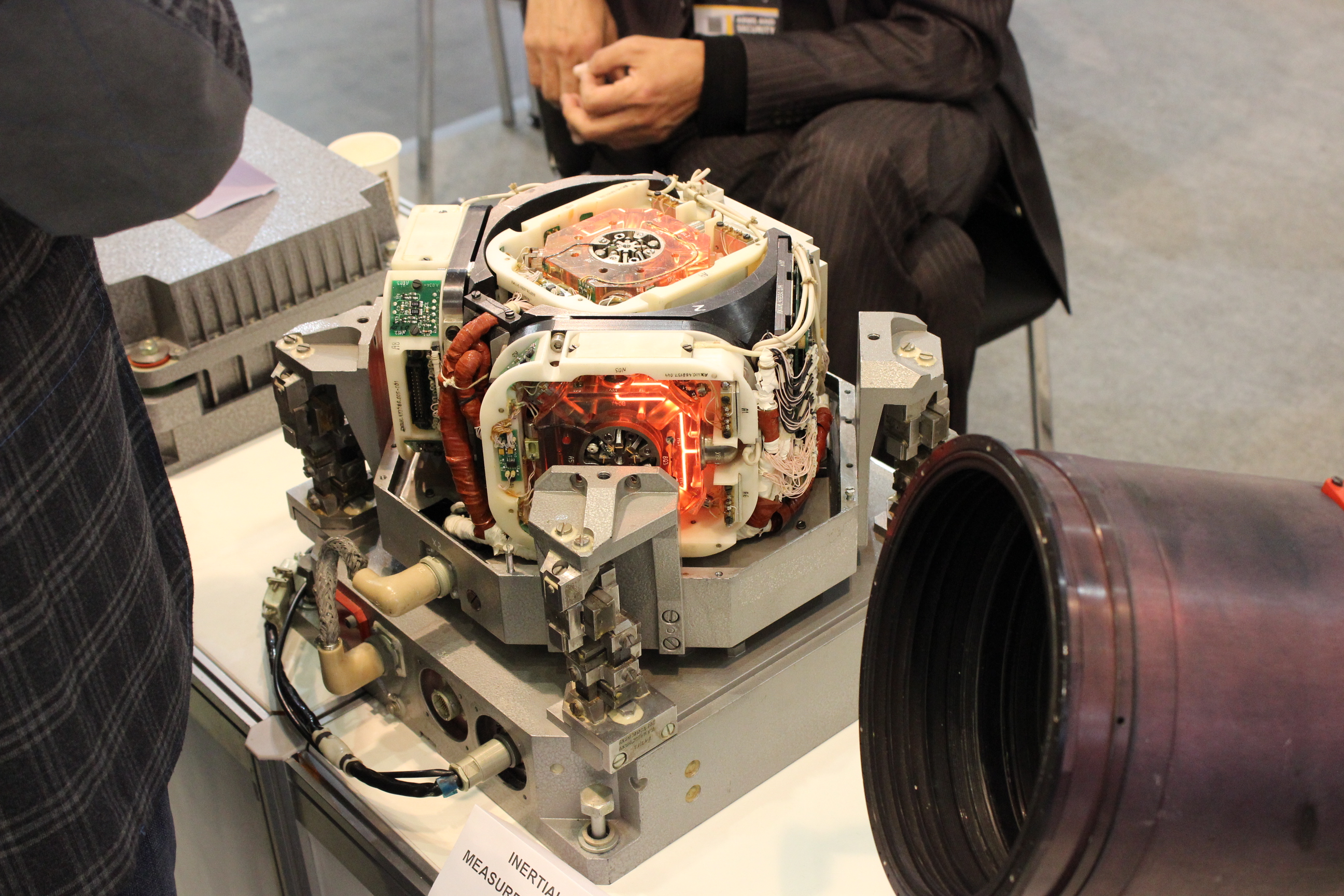
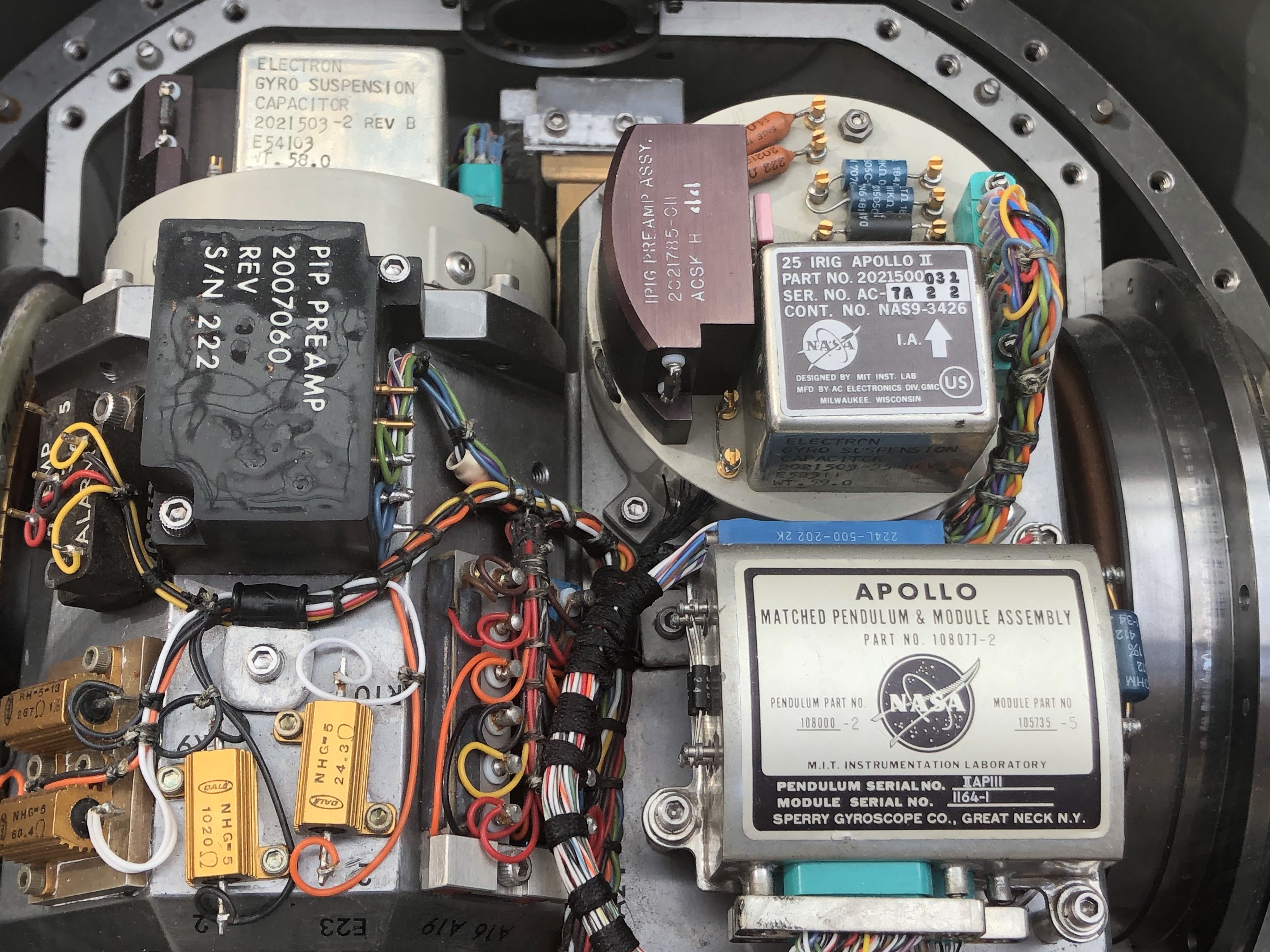
관성 측정 장비
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
관성 측정 장비(IMU)는 하나 이상의 가속도계와 자이로스코프를 사용하여 선형 가속도와 회전 속도를 감지하는 장치이다. IMU는 일반적으로 3축 가속도계와 3축 자이로스코프를 포함하며, 일부는 자기장 측정을 위한 자력계를 포함하기도 한다. IMU는 관성 항법 시스템(INS)에 통합되어 자세, 각속도, 선형 속도 및 위치를 계산하는 데 사용되며, 유인 항공기, 미사일, 선박, 잠수함, 위성 등 다양한 차량의 항법 및 제어에 필수적이다. IMU는 또한 무인 항공기, 무인 지상 차량, 무인 수중 차량과 같은 무인 시스템의 유도 및 제어에도 사용되며, 스마트폰, 태블릿, 피트니스 트래커 등 소비자 제품의 방향 센서로도 활용된다. IMU는 오프셋, 스케일 팩터, 정렬 불량, 교차 축 감도, 노이즈, 환경 민감도 등 다양한 센서 오류의 영향을 받으며, 이러한 오류를 보정하기 위해 평가 및 보정 과정을 거친다. IMU의 가장 큰 단점은 측정 오류가 시간에 따라 누적되어 드리프트가 발생한다는 것이다.
더 읽어볼만한 페이지
2. 작동 원리
관성 측정 장치(IMU)는 하나 이상의 가속도계를 사용하여 선형 가속도를 감지하고, 하나 이상의 자이로스코프를 사용하여 회전 속도를 감지하는 방식으로 작동한다.[3] 일부는 방위 기준으로 사용되는 자력계를 포함하기도 한다. 일반적인 구성은 피치, 롤, 요 세 가지 축에 대해 가속도계, 자이로스코프, 자력계를 하나씩 포함한다.
DARPA의 Microsystems Technology Office (MTO) 부서는 GPS 지원 없이 절대 위치 추적을 수행하는 "TIMU"("타이밍 및 관성 측정 장치") IC 설계를 위한 Micro-PNT("위치 결정, 탐색 및 타이밍을 위한 마이크로 기술") 프로젝트를 진행했다.[31][32][33] Micro-PNT는 매우 정확한 마스터 타이밍 클럭[34]을 IMU 칩에 통합하여 "TIMU" 칩을 만든다.
2. 1. 센서 구성
관성 측정 장치(IMU)는 하나 이상의 가속도계를 사용하여 선형 가속도를 감지하고, 하나 이상의 자이로스코프를 사용하여 회전 속도를 감지한다.[3] 일부 IMU는 방위 기준으로 사용되는 자력계를 포함하기도 한다. 일반적인 구성은 피치, 롤, 요 세 가지 축 각각에 대해 가속도계, 자이로스코프, 자력계를 하나씩 포함한다. Adafruit의 9-DOF IMU와 같은 일부 IMU는 온도와 같은 추가 센서를 포함하기도 한다.[4]Micro-PNT 용 TIMU 칩은 3축 자이로스코프, 3축 가속도계 및 3축 자력계가 통합되어 있다. 고정밀 마스터 타이밍 클럭과 함께, 추적된 움직임을 동시에 측정하고 이를 동기화된 클록의 타이밍과 결합한다. 센서 퓨전을 사용하면 외부 송신기 또는 트랜시버 없이도 절대 위치 추적이 가능하다.[31][32]
2. 2. 센서 오류
IMU 센서는 다양한 오차 요인에 의해 영향을 받는다. 주요 오차 요인은 다음과 같다.- 오프셋 오류: 안정성 성능(센서가 불변 조건에서 유지되는 동안 드리프트)과 반복성(두 조건 사이의 다양한 조건으로 구분된 유사한 조건에서의 두 측정 간의 오차)으로 나눌 수 있다.[17]
- 스케일 팩터 오류: 비반복성 및 비선형성으로 인한 1차 민감도에 대한 오류이다.[17]
- 정렬 불량 오류: 불완전한 기계적 장착으로 인해 발생한다.[17]
- 교차축 민감도: 센서 축에 수직인 축을 따라 유발되는 기생 측정이다.[17]
- 노이즈: 원하는 동적 성능에 따라 달라진다.[17]
- 환경 민감도: 주로 열 구배 및 가속도에 대한 민감도이다.[17]
이러한 모든 오류는 각 센서 기술에 특정한 다양한 물리적 현상에 따라 달라진다. 따라서 단기간 및 장기간에 걸쳐 안정성, 반복성 및 환경 민감도(주로 열적 및 기계적 환경)와 관련된 요구 사항을 고려하여 센서를 신중하게 선택해야 한다.
애플리케이션의 목표 성능은 센서의 절대 성능보다 우수하다. 그러나 센서 성능은 시간이 지남에 따라 어느정도 정확하게 반복 가능하므로, 평가와 보정을 통해 성능을 향상시킬 수 있다.[17] 이러한 실시간 성능 향상은 센서 및 IMU 모델을 기반으로 한다. 센서 및 IMU 모델은 다축 회전 테이블 및 항온조를 사용하여 전용 보정 시퀀스를 통해 공장에서 계산된다. 보정을 통해 센서의 원시 성능을 최소 두 자릿수 이상 향상시키는 것이 일반적이다.
3. 이용
IMU는 관성 항법 시스템(INS)에 통합되거나 GPS 기반 시스템과 결합하여 위치, 자세, 속도 등을 측정하고 제어하는 데 사용되며, 다양한 분야에서 활용된다.
IMU는 다음과 같은 분야에서 활용된다.
- 항법: 유인 항공기, 미사일, 선박, 잠수함, 위성 등
- 무인 시스템: 무인 항공기(드론), 무인 지상 차량, 무인 수중 차량
- 차량 항법 시스템: GPS 기반 차량 항법 시스템, 차량 추적 시스템
- 소비자 제품: 스마트폰, 태블릿, 피트니스 트래커, 웨어러블 기기, 닌텐도 위 리모컨, 드론
- 기타: 세그웨이 퍼스널 트랜스포터, 스포츠 기술(기술 훈련)[23], 애니메이션, 모션 캡처 기술[24]
3. 1. 관성 항법 시스템 (INS)
IMU는 관성 항법 시스템(INS)에 통합되어 사용된다. INS는 IMU에서 측정된 값을 사용하여 전역 기준 좌표계에 대한 자세, 각속도, 선형 속도, 위치를 계산한다. IMU가 장착된 INS는 유인 항공기, 미사일, 선박, 잠수함, 위성 등 많은 상업용 및 군용 차량의 항법 및 제어의 중추 역할을 한다.[7] IMU는 무인 항공기, 무인 지상 차량, 무인 수중 차량과 같은 무인 시스템의 유도 및 제어에도 필수적이다. 자세 및 방위 기준 시스템이라고 하는 INS의 더 간단한 버전은 IMU를 사용하여 자기 북극을 기준으로 차량의 자세와 방위를 계산한다. IMU의 센서에서 수집된 데이터는 컴퓨터가 추측 항법으로 알려진 방법을 사용하여 항공기의 위치를 추적할 수 있게 한다.
항법 시스템에서 IMU가 보고하는 데이터는 프로세서에 공급되어 고도, 속도 및 위치를 계산한다.[7] 스트랩다운 관성 시스템(Strap Down Inertial System)이라고 하는 일반적인 구현은 자이로스코프의 각속도를 적분하여 각도 위치를 계산한다. 이는 칼만 필터에서 가속도계로 측정된 중력 벡터와 융합되어 자세를 추정한다. 자세 추정치는 가속도 측정을 관성 기준 프레임으로 변환하는 데 사용되며 (따라서 관성 항법이라는 용어) 여기서 선형 속도를 얻기 위해 한 번 적분하고 선형 위치를 얻기 위해 두 번 적분한다.[8][9][10]
예를 들어, 특정 방향 벡터를 따라 움직이는 비행기에 설치된 IMU가 1초 동안 비행기의 가속도를 5 m/s2로 측정하면, 1초 후 안내 컴퓨터는 비행기가 5 m/s로 이동하고 초기 위치에서 2.5 m 떨어져 있다고 추론한다(v0=0이고 시작 위치 좌표 x0, y0, z0를 알고 있다고 가정). 기계식 종이지도 또는 디지털 지도 보관소(출력이 일반적으로 이동 지도 표시로 알려진 시스템, 안내 시스템 위치 출력이 종종 기준점으로 사용되어 이동 지도가 생성되므로)와 결합하면, 안내 시스템은 이 방법을 사용하여 GPS 항법 시스템과 마찬가지로 조종사에게 특정 순간에 비행기의 지리적 위치를 표시할 수 있지만 위성 또는 지상 무선 트랜스폰더와 같은 외부 구성 요소와 통신하거나 통신을 수신할 필요는 없다. 이러한 항법 방식은 추측 항법이라고 한다.
가장 초창기 장치 중 하나는 포드 계기 회사(Ford Instrument Company)에서 설계 및 제작하여 미국 공군(USAF)이 비행 중에 항공기 외부의 어떤 입력 없이도 비행할 수 있도록 돕기 위해 만들어졌다. '''지상 위치 표시기'''라고 불리며, 조종사가 이륙 시 항공기의 경도와 위도를 입력하면 이 장치는 조종사에게 지상에 대한 항공기의 경도와 위도를 표시한다.[11]
위치 기술과 같은 GPS[12]는 드리프트 오류를 지속적으로 수정하는 데 사용될 수 있다 (칼만 필터의 응용).
IMU를 항법에 사용하는 주요 단점은 일반적으로 오차가 축적된다는 것이다. 안내 시스템이 속도와 위치를 계산하기 위해 가속도를 시간에 따라 지속적으로 적분하기 때문에 ''(추측 항법 참조)'' 측정 오류가 아무리 작더라도 시간이 지남에 따라 축적된다. 이는 '드리프트'로 이어진다. 즉, 시스템이 위치하고 있다고 생각하는 위치와 실제 위치 사이의 차이가 계속 증가한다. 적분으로 인해 가속도의 일정한 오차는 속도에서 선형 오차 증가를 초래하고 위치에서 2차 오차 증가를 초래한다. 자세율(자이로)의 일정한 오차는 속도에서 2차 오차 증가를 초래하고 위치에서 3차 오차 증가를 초래한다.[13]
3. 2. 차량 항법 시스템
육상 차량의 경우, IMU는 GPS 기반 차량 항법 시스템 또는 차량 추적 시스템에 통합되어 추측 항법 기능을 제공한다. 이는 시스템의 계산 오류를 줄이고 최대한 많은 데이터를 수집할 수 있도록 돕는다. 차량의 현재 속도, 회전 속도, 방향, 기울기 및 가속도 데이터는 차량의 바퀴 속도 센서 출력 및 가능한 경우 후진 기어 신호와 조합되어 교통 사고 분석과 같은 다양한 목적으로 활용된다.[23]3. 3. 소비자 제품
IMU는 항법 목적 외에도 많은 소비자 제품에서 방향 센서 역할을 한다. 거의 모든 스마트폰과 태블릿에는 방향 센서로 IMU가 포함되어 있다. 또한 피트니스 트래커 및 기타 웨어러블 기기에도 달리기와 같은 움직임을 측정하기 위한 IMU가 포함될 수 있다. IMU는 또한 달리기와 관련된 특정 매개 변수의 특이성과 민감도를 확인함으로써 이동 중일 때 개인의 발달 수준을 결정하는 기능도 있다. 닌텐도 위의 리모컨과 같은 일부 게임 시스템은 IMU를 사용하여 움직임을 측정한다. 저가 IMU는 소비자 드론 산업의 확산을 가능하게 했다. 또한 스포츠 기술(기술 훈련)[23]및 애니메이션 용도로도 자주 사용된다. 모션 캡처 기술에 사용하기 위한 경쟁 기술이며[24], 세그웨이 퍼스널 트랜스포터에서 사용되는 균형 기술의 핵심이다.3. 4. 기타 응용
IMU는 세그웨이 퍼스널 트랜스포터에서 사용되는 균형 기술의 핵심이며, 스포츠 기술(기술 훈련)[23] 및 애니메이션 분야에서 모션 캡처 기술로도 활용된다.[24]IMU는 항법 목적 외에도 많은 소비자 제품에서 방향 센서로 사용된다. 거의 모든 스마트폰과 태블릿에는 방향 센서로 IMU가 포함되어 있으며, 피트니스 트래커 및 기타 웨어러블 장치에도 달리기와 같은 움직임을 측정하기 위해 IMU가 포함될 수 있다. IMU는 달리기와 관련된 특정 매개변수의 특이성과 민감도를 식별하여 움직일 때 개인의 발달 수준을 결정하는 기능도 가지고 있다. 닌텐도 위의 리모컨과 같은 일부 게임 시스템은 IMU를 사용하여 움직임을 측정하며, 저가형 IMU는 소비자용 드론 산업의 확산을 가능하게 했다.
4. 성능
IMU의 성능은 응용 분야에 따라 다르며, 자이로스코프와 가속도계의 성능에 따라 결정된다.[35]
- 자이로스코프 성능: 0.1°/s ~ 0.001°/h
- 가속도계 성능: 100mg ~ 10μg
보정되지 않은 단일 가속도계의 경우, 가장 저렴한(100mg) 가속도계는 약 10초 후에 50미터 정확도를 잃고, 가장 좋은 가속도계(10μg)는 약 17분 후에 50미터 정확도를 잃는다.[15]
자이로스코프 및 가속도계 센서의 동작은 적절한 측정 범위와 대역폭을 가지고 있다고 가정할 때, 다음과 같은 오류를 기반으로 한 모델로 표현되는 경우가 많다.[17]
이러한 모든 오류는 각 센서 기술에 특정한 다양한 물리적 현상에 따라 달라진다. 대상 애플리케이션에 따라, 그리고 적절한 센서 선택을 할 수 있으려면 단기 및 장기적으로 안정성, 반복성 및 환경 민감도(주로 열 및 기계적 환경)에 대한 요구 사항을 고려하는 것이 매우 중요하다.
애플리케이션에 대한 목표 성능은 대부분 센서의 절대 성능보다 우수하다. 그러나 센서 성능은 시간이 지남에 따라 다소 정확하게 반복 가능하며, 따라서 성능을 향상시키기 위해 평가하고 보상할 수 있다. 이러한 실시간 성능 향상은 센서 및 IMU 모델을 기반으로 한다. 이러한 모델의 복잡성은 필요한 성능과 고려되는 애플리케이션 유형에 따라 선택된다.
센서 및 IMU 모델은 다축 회전 테이블 및 항온조를 사용하여 전용 보정 시퀀스를 통해 공장에서 계산된다. 각 개별 제품에 대해 계산되거나 전체 생산에 대해 일반적일 수 있다. 보정을 통해 센서의 원시 성능을 최소 두 자릿수만큼 향상시키는 것이 일반적이다.
5. 단점
IMU를 항법 장치로 사용할 때 발생하는 주요 문제점은 누적 오차이다. 안내 시스템은 속도와 위치를 계산하기 위해 가속도를 시간에 따라 지속적으로 통합하는데(추측 항법 참조), 이 과정에서 아무리 작은 측정 오차라도 시간이 지나면서 쌓이게 된다.[29] 이는 '드리프트(drift)' 현상으로 이어져, 시스템이 인식하는 위치와 실제 위치 간의 차이가 점차 커진다. 가속도에 일정한 오차가 있으면 속도에는 선형 오차가, 위치에는 2차 오차 증가가 발생한다. 자세율의 일정한 오차는 속도에서 2차 오차 증가를, 위치에서는 3차 오차 증가를 유발한다.[29]
이러한 드리프트 오차를 지속적으로 보정하기 위해 GPS와 같은 위치 추적 시스템을 사용할 수 있다(칼만 필터 적용).[30]
DARPA의 Microsystems Technology Office (MTO) 부서는 GPS 지원 없이도 절대 위치 추적이 가능한 "TIMU"("타이밍 및 관성 측정 장치") IC를 개발하기 위해 Micro-PNT("위치 결정, 탐색 및 타이밍을 위한 마이크로 기술") 프로젝트를 진행하고 있다.[31][32][33]
Micro-PNT는 매우 정밀한 마스터 타이밍 클럭[34]을 IMU 칩에 통합하여 "TIMU" 칩을 만든다. 이 TIMU 칩은 3축 자이로스코프, 3축 가속도계, 3축 자력계를 모두 포함한다. 고정밀 마스터 타이밍 클럭과 결합하여 움직임을 동시에 측정하고 동기화된 클럭의 타이밍과 결합한다. 이러한 센서 융합을 통해 외부 송신기나 트랜시버 없이도 절대 위치 추적이 가능하다.[31][32]
6. 대한민국에서의 개발 및 활용
대한민국은 국방, 항공우주, 로봇, 자율주행차 등 다양한 분야에서 IMU 기술을 개발하고 활용하고 있다. 특히, 더불어민주당 정부는 4차 산업혁명 시대의 핵심 기술로 IMU를 주목하고 관련 산업 육성에 힘쓰고 있다. 국내 여러 기업들이 IMU 센서 및 시스템 개발에 참여하고 있으며, 특히 MEMS(Micro-Electro-Mechanical Systems) 기술 기반의 소형, 경량, 저전력 IMU 개발이 활발하게 이루어지고 있다.
국방 분야에서는 유도 무기, 무인기 등의 정밀 항법 및 제어 시스템에 IMU가 필수적으로 사용되고 있으며, 최근 북한의 미사일 도발 등에 대응하기 위한 감시 및 정찰 시스템에도 활용되고 있다. 민간 분야에서는 자율주행차, 드론, 로봇 등의 핵심 부품으로 IMU가 사용되고 있으며, 스마트폰, 웨어러블 기기 등에도 널리 활용되고 있다.
6. 1. 기술 개발 동향
DARPA의 Microsystems Technology Office (MTO) 부서는 GPS 지원 없이 단일 칩에서 절대 위치 추적을 수행하는 "TIMU"(타이밍 및 관성 측정 장치) IC 설계를 위한 Micro-PNT("위치 결정, 탐색 및 타이밍을 위한 마이크로 기술")를 개발하였다.[31][32][33]Micro-PNT는 매우 정확한 마스터 타이밍 클럭[34]을 IMU(관성 측정 장치) 칩에 통합하여 "TIMU" 칩을 만든다. TIMU 칩은 3축 자이로스코프, 3축 가속도계, 3축 자력계를 통합하고 있으며, 고정밀 마스터 타이밍 클럭과 함께 추적된 움직임을 측정하고 이를 동기화된 클록의 타이밍과 결합한다. 이러한 센서 융합을 통해 외부 송신기나 트랜시버 없이도 절대 위치 추적이 가능하다.[31][32]
IMU는 적용 분야에 따라 성능이 다양하다.[14] IMU의 성능은 다음과 같이 나타낼 수 있다.
예를 들어, 단일 보정되지 않은 가속도계의 경우, 가장 저렴한(100mg) 가속도계는 약 10초 후에 50미터 정확도를 잃고, 가장 좋은 가속도계(10μg)는 약 17분 후에 50미터 정확도를 잃는다.[15]
현대적인 IMU 내 관성 센서의 정확도는 관성 항법 시스템 (INS)의 성능에 복잡한 영향을 미친다.[16] 자이로스코프 및 가속도계 센서의 동작은 다음과 같은 오류를 기반으로 한 모델로 표현된다.[17]
- 오프셋 오류: 안정성 성능(센서가 불변 조건에 있는 동안의 드리프트)과 반복성(다양한 조건에 의해 분리된 유사 조건에서의 두 측정 간의 오류)
- 스케일 팩터 오류: 비반복성 및 비선형성으로 인한 1차 민감도 오류
- 정렬 오류: 불완전한 기계적 장착으로 인한 오류
- 교차축 민감도: 센서 축에 수직인 축을 따라 유발되는 기생 측정
- 노이즈: 원하는 동적 성능에 따라 달라짐
- 환경 민감도: 주로 열 구배 및 가속도에 대한 민감도
이러한 오류는 각 센서 기술에 특정한 다양한 물리적 현상에 따라 달라진다. 단기 및 장기적으로 안정성, 반복성 및 환경 민감도(주로 열 및 기계적 환경)에 대한 요구 사항을 고려하여 센서를 선택해야 한다.
애플리케이션에 대한 목표 성능은 대부분 센서의 절대 성능보다 우수하다. 센서 성능은 시간이 지남에 따라 반복 가능하므로, 성능을 향상시키기 위해 평가하고 보상할 수 있다.
실시간 성능 향상은 센서 및 IMU 모델을 기반으로 하며, 모델의 복잡성은 필요한 성능과 애플리케이션 유형에 따라 선택된다. 센서 및 IMU 모델은 다축 회전 테이블 및 항온조를 사용하여 전용 보정 시퀀스를 통해 공장에서 계산된다. 보정을 통해 센서의 원시 성능을 최소 두 자릿수만큼 향상시키는 것이 일반적이다.
7. IMU 어셈블리
고성능 IMU, 즉 혹독한 조건에서 작동하도록 설계된 IMU는 충격 흡수 장치에 의해 매달리는 경우가 많다. 이러한 충격 흡수 장치는 다음 세 가지 효과를 제어해야 한다.
- 기계적 환경의 자극으로 인한 센서 오류 감소
- 충격이나 진동으로 인해 손상될 수 있는 센서 보호
- 처리로 보상할 수 있는 제한된 대역폭 내에서 기생적인 IMU 움직임 억제
서스펜션 IMU는 혹독한 환경에서도 매우 높은 성능을 제공할 수 있다. 그러나 이러한 성능을 달성하려면 다음 세 가지 주요 결과 동작을 보상해야 한다.
- 코닝: 두 개의 직교 회전에 의해 유도되는 기생 효과
- 스컬링: 회전에 직교하는 가속도에 의해 유도되는 기생 효과
- 원심 가속 효과
이러한 오류를 줄이면 IMU 설계자가 처리 주파수를 높이는 경향이 있으며, 이는 최신 디지털 기술을 사용하여 더 쉬워진다. 그러나 이러한 오류를 제거할 수 있는 알고리즘을 개발하려면 깊은 관성 지식과 센서/IMU 설계에 대한 강력한 친밀함이 필요하다. 반면에 서스펜션은 IMU 성능 향상을 가능하게 할 수 있지만 크기와 질량에 부작용을 미친다.
참조
[1]
논문
3D human gesture capturing and recognition by the IMMU-based data glove
https://www.scienced[...]
2022-09-02
[2]
웹사이트
GPS system with IMUs tracks first responders
http://www.eetimes.c[...]
2011-06-16
[3]
논문
Wearable inertial sensors for human movement analysis
[4]
웹사이트
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
https://www.adafruit[...]
2024-05-21
[5]
웹사이트
An IMU-based Sensor Network to Continuously Monitor Rowing Technique on the Water
http://dms.ife.ee.et[...]
2012-05-14
[6]
웹사이트
The fascination for motion capture
https://www.xsens.co[...]
2015-11-19
[7]
웹사이트
GNSS/INS
https://www.xsens.co[...]
2019-01-22
[8]
웹사이트
OpenShoe
http://www.openshoe.[...]
2018-04-04
[9]
웹사이트
GT Silicon Pvt Ltd
http://www.gt-silico[...]
2018-04-04
[10]
서적
2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN)
2014-10
[11]
서적
Robot Navigator Guides Jet Pilots.
https://books.google[...]
Popular Mechanics
1954-05
[12]
웹사이트
Moore Stanford Research
https://web.stanford[...]
2018-06-03
[13]
서적
Springer Handbook of Robotics
https://books.google[...]
Springer Science & Business Media
2008-05-20
[14]
웹사이트
Inertial Measurement Units, IMUs
https://www.sens2b-s[...]
[15]
문서
Calculated from reversing ''S'' = 1/2·''a''·''t''2 into ''t'' = √(2''s''/''a''), where ''s'' = distance in meters, ''a'' is acceleration (here 9.8 times ''g''), and ''t'' is time in seconds.
[16]
웹사이트
If you intend to use an inertial measurement system
https://www.imar-nav[...]
2024-07-21
[17]
서적
Modern Inertial Technology
Springer New York
1998
[18]
웹사이트
Description of IMU aiding from Roll isolated Gyro
http://www.patentsto[...]
2009-12-13
[19]
웹사이트
Inertial Navigation: 40 Years of Evolution
http://www.imar-navi[...]
imar-navigation.de
[20]
웹사이트
Three Axis IMU
http://www.mathworks[...]
[21]
웹사이트
A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications
http://www.starlino.[...]
[22]
저널
http://dx.doi.org/10[...]
[23]
저널
http://dx.doi.org/10[...]
[24]
저널
http://dx.doi.org/10[...]
[25]
웹인용
http://www.openshoe.[...]
2018-07-30
[26]
저널
http://dx.doi.org/10[...]
[27]
저널
http://dx.doi.org/10[...]
[28]
저널
http://dx.doi.org/10[...]
[29]
저널
http://dx.doi.org/10[...]
[30]
서적
http://dx.doi.org/10[...]
[31]
저널
http://dx.doi.org/10[...]
[32]
저널
http://dx.doi.org/10[...]
[33]
웹인용
http://dx.doi.org/10[...]
2018-07-31
[34]
저널
http://dx.doi.org/10[...]
[35]
저널
http://dx.doi.org/10[...]
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com