루노호트 2호
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
루노호트 2호는 1973년 소련이 달에 보낸 무인 달 탐사 로버이다. 루노호트 2호는 루나 21호를 통해 달 표면에 착륙했으며, 약 4개월 동안 39km를 이동하며 86장의 파노라마 사진과 8만 개 이상의 텔레비전 영상을 지구로 전송했다. 루노호트 2호는 다양한 과학 장비를 탑재하여 달 표면의 물리적 특성을 연구했으며, 2014년까지 지구 밖 로버 주행 거리 기록을 보유했다. 1993년 경매를 통해 개인에게 소유권이 이전되었으며, 현재 달 레이더 측정 실험을 통해 위치가 확인되고 있다.

더 읽어볼만한 페이지
- 루노호트 계획 - 루노호트 1호
루노호트 1호는 1970년 소련이 발사한 달 탐사차로, 322일 동안 10,540미터를 이동하며 2만 장 이상의 사진과 과학 데이터를 전송했으며 1971년 임무가 종료되었다. - 라보츠킨 - S-75 드비나
S-75 드비나는 소련에서 개발되어 여러 국가에서 운용된 지대공 미사일 시스템으로, 고고도 폭격기 요격을 목표로 개발되었으며, 다양한 전투에서 사용되었고 여러 개량형을 거쳐 현재도 일부 국가에서 운용되거나 지대지 미사일로 개조되어 사용된다. - 라보츠킨 - 엑소마스
엑소마스는 유럽 우주국과 러시아 연방 우주국이 공동으로 추진하는 화성 탐사 계획으로, 궤도선과 로버를 통해 화성의 생명체 흔적을 탐사하는 것을 목표로 하며, 2016년 1차 발사에서 궤도선은 성공했지만 착륙선은 실패했고, 2022년 2차 발사는 연기되어 2028년 이후 발사를 목표로 재조정되었다.

2. 역사적 배경
루노호트 2호는 소련의 달 탐사 계획인 루노호트 계획의 일환으로 개발되었다. 1960년대부터 시작된 미국과의 치열한 우주 경쟁 속에서, 소련은 달 표면 탐사를 위한 무인 로버 개발에 착수했다. 1970년에 발사된 루노호트 1호는 세계 최초로 달 표면에서 성공적으로 작동한 로버가 되었으며, 이는 소련의 우주 기술력을 과시하는 중요한 성과였다.
루노호트 2호는 8개의 바퀴를 가지고 있었으며, 각 바퀴에는 독립적인 서스펜션, 전동기, 브레이크가 장착되어 있었다. 두 가지 속도로 움직일 수 있었는데, 하나는 약 1km/h였고, 다른 하나는 약 2km/h였다. 탐사를 위해 3대의 비디오 카메라가 장착되었고, 이 중 하나는 높은 곳에 설치되어 고화질 영상을 지구로 전송했다. 이 영상은 5명의 지상 통제팀이 실시간으로 운전 명령을 내리는 데 사용되었다. 4대의 파노라마 카메라도 탑재되었다.
루노호트 1호의 성공에 힘입어, 소련은 더욱 발전된 성능의 루노호트 2호를 개발하게 되었다. 이 프로젝트는 달 표면의 지질학적 조사를 확대하고, 미래의 유인 달 탐사를 위한 기술적 기반을 마련하는 것을 목표로 했다.
3. 루노호트 2호의 구조 및 기술
전력은 경첩식 원형 덮개 안쪽의 태양 전지 패널을 통해 공급되었으며, 덮개를 열어 배터리를 충전했다. 달의 긴 밤 동안에는 폴로늄-210 방사성 동위원소 열원을 사용하여 온도를 유지했다. 과학 장비로는 토양 역학 시험기, 태양 X선 실험기, 가시광선 및 자외선 측정 장치, 자력계, 방사계, 광 검출기, 프랑스제 레이저 코너 리플렉터 등이 있었다. 통신을 위해 헬리컬 안테나와 원뿔형 안테나가 사용되었다.[26] 착륙선에는 블라디미르 레닌의 부조와 소비에트 연방의 문장이 실려 있었다. 착륙선과 로버의 총 중량은 1814kg이었다.
3. 1. 로버 및 하부 시스템
로버는 높이 135cm, 무게 840kg이었다. 길이는 약 170cm, 폭은 160cm였으며, 각 바퀴마다 독립 현가 장치, 전동기, 브레이크가 장착된 8개의 바퀴가 있었다. 로버는 약 1km/h와 2km/h의 두 가지 속도를 낼 수 있었다.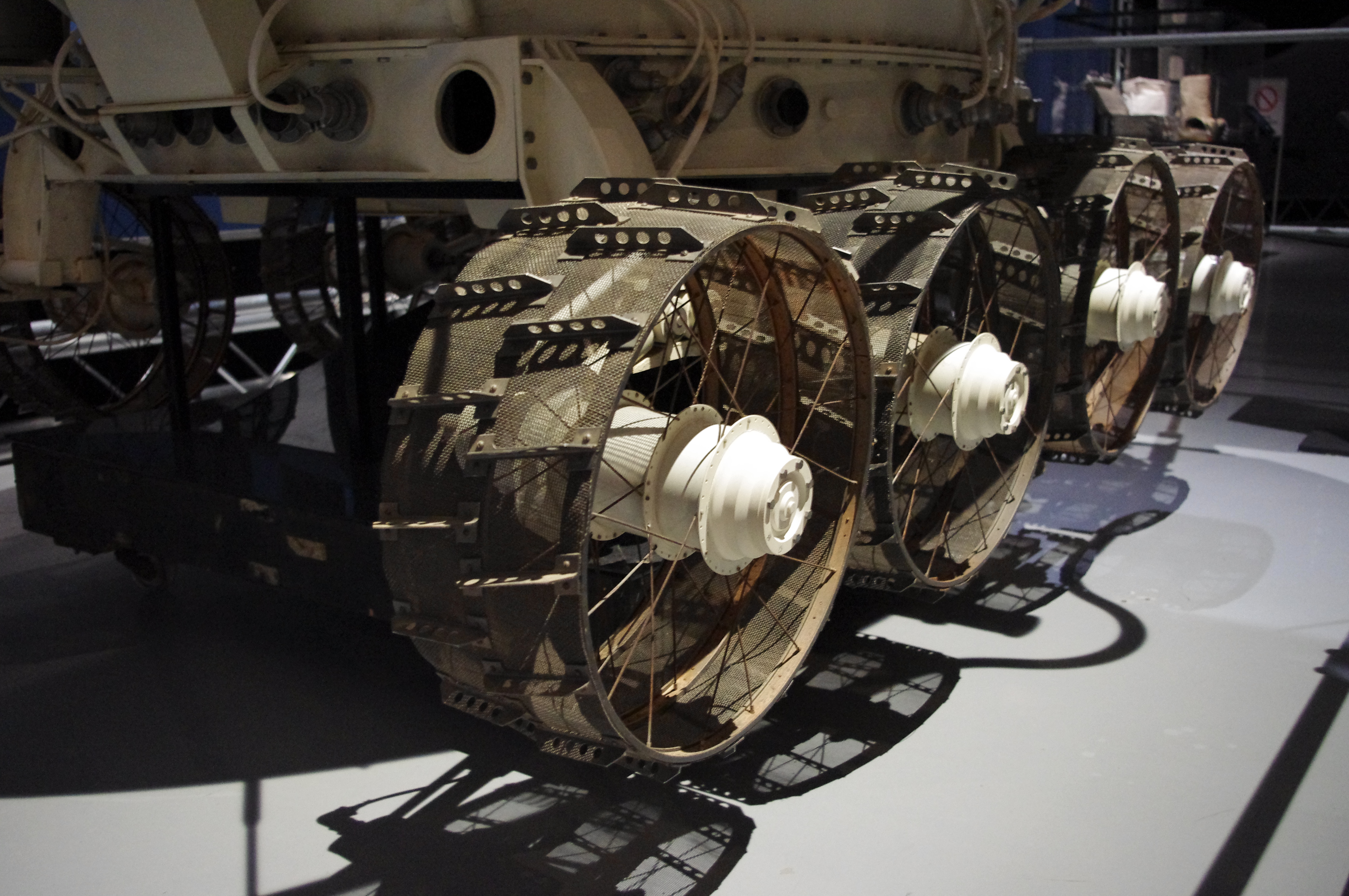
''루노호트 2호''에는 3개의 텔레비전 카메라가 장착되어 있었는데, 하나는 항해를 위해 로버 상단에 장착되었으며, 초당 3.2, 5.7, 10.9 또는 21.1초의 프레임 속도로 고해상도 이미지를 반환할 수 있었다. 이 이미지들은 지구상의 5명의 조종사 팀에 의해 사용되었으며, 이들은 실시간으로 로버에 운전 명령을 보냈다.
전력은 기기실을 덮는 둥근 경첩 뚜껑 안쪽에 있는 태양 전지 패널에서 공급되었으며, 뚜껑을 열면 배터리가 충전되었다. 긴 달밤 동안 로버를 따뜻하게 유지하기 위해 폴로늄-210 방사성 동위원소 열원이 사용되었다.[26]
로버에는 4개의 파노라마 카메라가 장착되어 있었다. 과학 장비로는 토양 역학 시험기, 태양 X선 실험, 가시광선 및 자외선 수준을 측정하는 천체광도계, 로버 전방 2.5m 붐 끝에 배치된 자력계, 방사계, 레이저 감지 실험을 위한 광검출기 (루빈-1), 프랑스에서 제공한 레이저 코너 리플렉터 등이 있었다.
착륙선에는 블라디미르 레닌의 부조와 소비에트 연방의 문장이 실려 있었다.
3. 2. 전력 시스템
전력은 기기실을 덮는 둥근 경첩 뚜껑 안쪽에 있는 태양 전지 패널에서 공급되었으며, 뚜껑을 열면 배터리가 충전되었다. 긴 달밤 동안 로버를 따뜻하게 유지하기 위해 폴로늄-210 방사성 동위원소 열원이 사용되었다.[26]
3. 3. 과학 장비
루노호트 2호에는 3대의 텔레비전 카메라가 장착되어 있었는데, 하나는 항해를 위해 로버 상단에 장착되었으며, 초당 3.2, 5.7, 10.9 또는 21.1초의 프레임 속도로 고해상도 이미지를 반환할 수 있었다.[26] 이 이미지들은 지구상의 5명으로 구성된 조종사 팀에 의해 사용되었으며, 이들은 실시간으로 로버에 운전 명령을 보냈다.
전력은 기기실을 덮는 둥근 경첩 뚜껑 안쪽에 있는 태양 전지 패널에서 공급되었으며, 뚜껑을 열면 배터리가 충전되었다. 긴 달밤 동안 로버를 따뜻하게 유지하기 위해 폴로늄-210 방사성 동위원소 열원이 사용되었다.[26]
로버에는 4개의 파노라마 카메라가 장착되어 있었다. 과학 장비로는 토양 역학 시험기, 태양 X선 실험, 가시광선 및 자외선 수준을 측정하는 천체광도계, 로버 전방 2.5m 붐 끝에 배치된 자력계, 방사계, 레이저 감지 실험을 위한 광검출기 (루빈-1), 프랑스에서 제공한 레이저 코너 리플렉터 등이 있었다.[26]
4. 임무 수행
루노호트 2호는 달의 낮 동안 작동하며, 때때로 태양 전지판으로 배터리를 충전하기 위해 멈췄다. 밤에는 방사성 열원을 사용하여 따뜻하게 유지하며 다음 일출까지 동면했다.[1] 루노호트 2호는 4개월 동안 운용되며 37km(이후 42km로 정정)를 주행하고, 86장의 파노라마 사진과 8만 장 이상의 TV 영상을 지구로 전송하는 등 많은 과학적 성과를 거두었다.[28]
4. 1. 발사 및 달 궤도 진입
프로톤-K/블록 D 발사체는 우주선을 지구 주차 궤도에 진입시킨 후 달 전이 궤도에 올려놓았다. 1973년 1월 12일, 루나 21호는 90kmx100km의 달 궤도에 진입했다. 1월 13일과 14일에는 근월점 고도가 16km로 낮아졌다.[1]4. 2. 착륙 및 표면 운용
1973년 1월 15일, 40번의 궤도 비행 후, 16km 고도에서 제동 로켓이 점화되면서 우주선의 강하가 시작되었고, 우주선은 탈 궤도에 진입했다. 750m 고도에서 주 엔진이 점화되어 낙하 속도를 줄였고, 22m 고도에 도달했다. 이 시점에서 주 엔진이 멈추고 보조 엔진이 점화되어 착륙선이 표면에서 1.5m 떨어진 지점까지 낙하 속도를 줄였고, 엔진이 꺼졌다. 착륙은 23:35 (UT)에 북위 25.85도, 동경 30.45도 지점의 르 모니에 분화구에서 이루어졌다.[1]착륙 후, ''루노호트 2호''는 주변 지역의 TV 이미지를 촬영한 다음, 1월 16일 01:14 (UT)에 경사로를 따라 표면으로 내려와 ''루나 21'' 착륙선과 착륙 지점의 사진을 찍고 30미터를 이동했다. 배터리를 충전한 후, 현장과 착륙선의 사진을 더 찍은 다음 달 탐사를 시작했다.[1]
탐사차는 달의 낮 동안 작동하며, 때때로 태양 전지판으로 배터리를 충전하기 위해 멈췄다. 밤에는 방사성 열원을 사용하여 따뜻하게 유지하며 다음 일출까지 동면했다.[1]
4. 3. 임무 종료
1973년 6월 4일, 루노호트 2호의 프로그램 완료가 발표되었다. 이는 차량이 5월 중순에 고장났거나, 5월에서 6월 사이 달의 밤 이후 재가동할 수 없게 되었을 것이라는 추측을 낳았다.[4]최근 알렉산더 바실레프스키는 1973년 5월 9일 로버의 열린 덮개가 분화구 벽에 닿아 먼지로 덮였다는 일화를 언급했다. 덮개가 닫히면서 이 먼지(매우 훌륭한 절연체)가 방열기에 쏟아졌다. 다음 날인 5월 10일, 관제 센터는 자체적으로 냉각할 수 없어 ''루노호트 2호''의 내부 온도가 상승하는 것을 감지했으며, 결국 로버는 작동 불능 상태가 되었다.[4] 5월 11일, 로버의 신호가 끊어졌다.
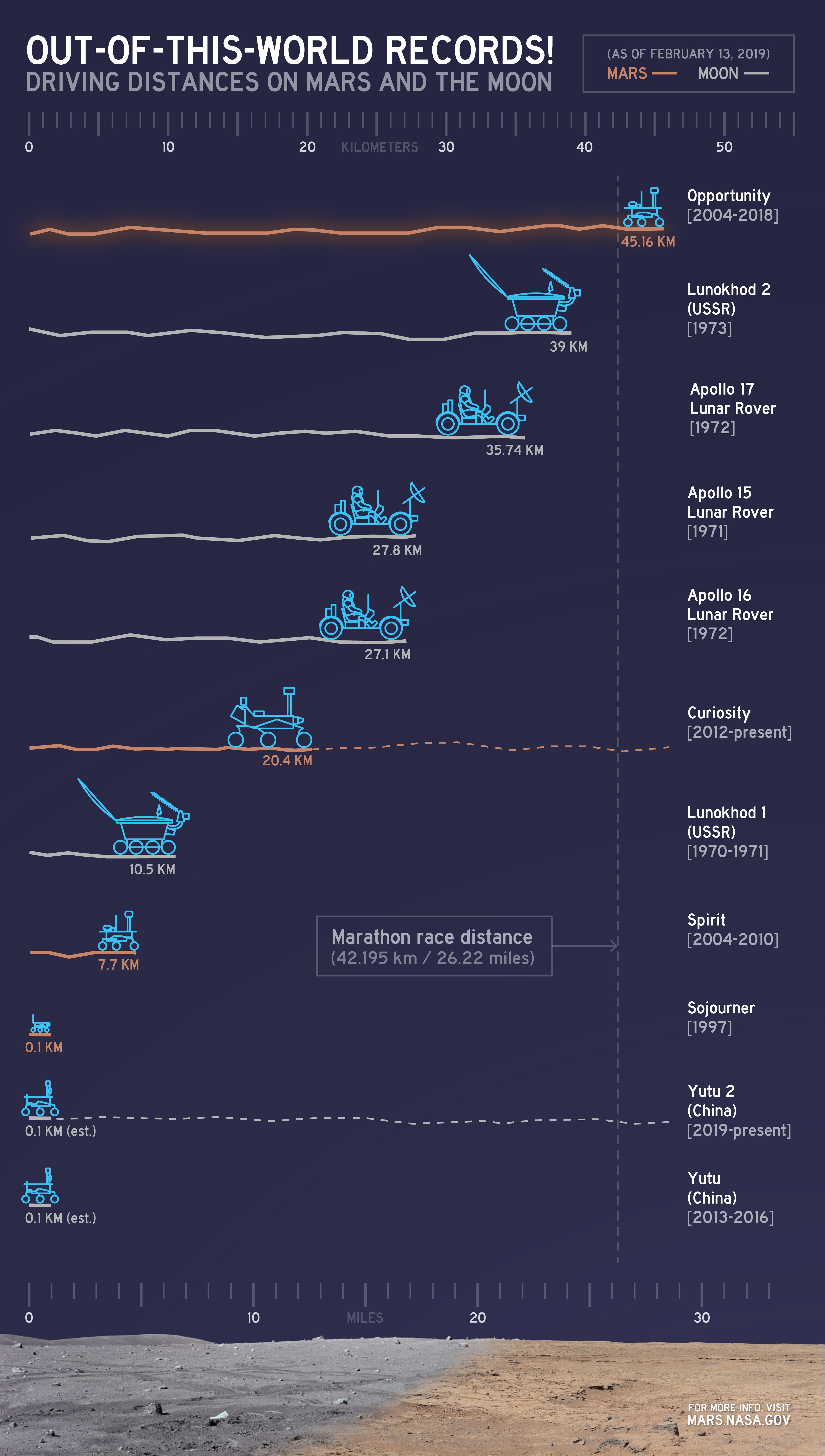
루노호트 2호는 4개월에 걸쳐 운용되었으며, 고지대와 열구를 포함한 37km 지역을 주파하며, 86장의 파노라마 사진과 80,000개가 넘는 텔레비전 영상을 지구로 전송했다. 또한, 레이저 레인징 측정 등 많은 기계의 테스트와 실험이 기간 중에 완료되었다. 37km의 주행 거리는 2013년 6월 말 오퍼튜니티에 의해 갱신되기 전까지 지구 이외의 천체에 투입된 탐사 차량 중 가장 긴 것이었다. 2013년 7월, NASA의 Lunar Reconnaissance Orbiter (LRO) 카메라로 루노호트 2호의 위치를 확인한 결과, 기존의 37km보다 4.8km 더 긴 약 42km를 주행했다는 것이 밝혀졌다.[28]
5. 임무 결과 및 의의
루노호트 2호ru는 약 4개월 동안 활동하며 많은 과학적, 기술적 성과를 달성했다. 86장의 파노라마 이미지와 8만 장 이상의 TV 사진을 전송했으며, 표면 기계적 테스트, 레이저 거리 측정 등 다양한 실험을 수행했다.[4][5][6]
당초 루노호트 2호ru의 이동 거리는 37km로 알려졌으나, 이후 러시아와 미국 과학자들의 분석 결과 39km로 최종 합의되었다.[7][8][9][10]
루노호트 2호ru는 2014년 7월 27일까지 지구 밖에서 가장 멀리 이동한 로버 기록을 보유했으나, NASA의 화성 탐사 로버 오퍼튜니티가 이 기록을 경신했다.[12][13]
5. 1. 과학적 성과
''루노호트 2호''는 약 4개월 동안 활동했으며, 원래 추정으로는 언덕이 많은 고지대와 리를 포함하여 37km의 지형을 이동했고, 86장의 파노라마 이미지와 8만 장 이상의 TV 사진을 전송했다.[4][5][6] 이 기간 동안 표면에 대한 많은 기계적 테스트, 레이저 거리 측정 및 기타 실험이 완료되었다. ''루노호트 2호''는 바퀴 회전을 기준으로 37km를 이동한 것으로 생각되었지만, 모스크바 국립 지리 및 지도 제작 대학교(MIIGAiK)의 러시아 과학자들은 LRO 이미지를 기반으로 거리를 약 42.1km에서 42.2km로 수정했다.[7][8] 그 후, 미국 과학자들과의 논의를 통해 최종 거리는 39km로 합의되었다.[9][10] 국제 연구팀은 두 로버의 주행 거리를 계산하는 데 사용된 방법이 달에서 화성까지 일관되고 비교 가능하다는 것을 확인했다.[11]
''루노호트 2호''는 2014년 7월 27일까지 지구 밖 로빙 거리 기록을 보유하고 있었으며, NASA의 화성 ''오퍼튜니티'' 로버가 40km 이상을 이동하면서 이 기록을 넘어섰다.[12][13]
5. 2. 기술적 성과
'루노호트 2호'는 약 4개월 동안 활동하면서, 언덕이 많은 고지대와 리를 포함하여 37km의 지형을 이동했고, 86장의 파노라마 이미지와 8만 장 이상의 TV 사진을 전송했다.[4][5][6] 이 기간 동안 표면에 대한 많은 기계적 테스트, 레이저 거리 측정 및 기타 실험이 완료되었다. '루노호트 2호'는 바퀴 회전을 기준으로 37km를 이동한 것으로 알려졌으나, 모스크바 국립 지리 및 지도 제작 대학교(MIIGAiK)의 러시아 과학자들은 달 표면에 대한 LRO 이미지를 기반으로 이를 약 42.1km에서 42.2km로 수정했다.[7][8] 이후, 미국 측과의 논의를 통해 최종 거리는 39km로 합의되었다.[9][10] 국제 연구팀은 두 로버의 주행 거리를 계산하는 데 사용된 방법이 달에서 화성까지 일관되고 비교 가능하다는 것을 확인했다.[11]
'루노호트 2호'는 2014년 7월 27일까지 지구 밖에서 가장 멀리 이동한 로버라는 기록을 보유하고 있었으나, NASA의 화성 '오퍼튜니티' 로버가 40km 이상을 이동하면서 이 기록을 경신했다.[12][13]
6. 현재 상태
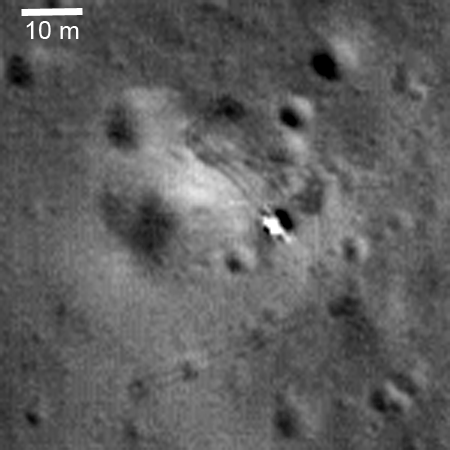
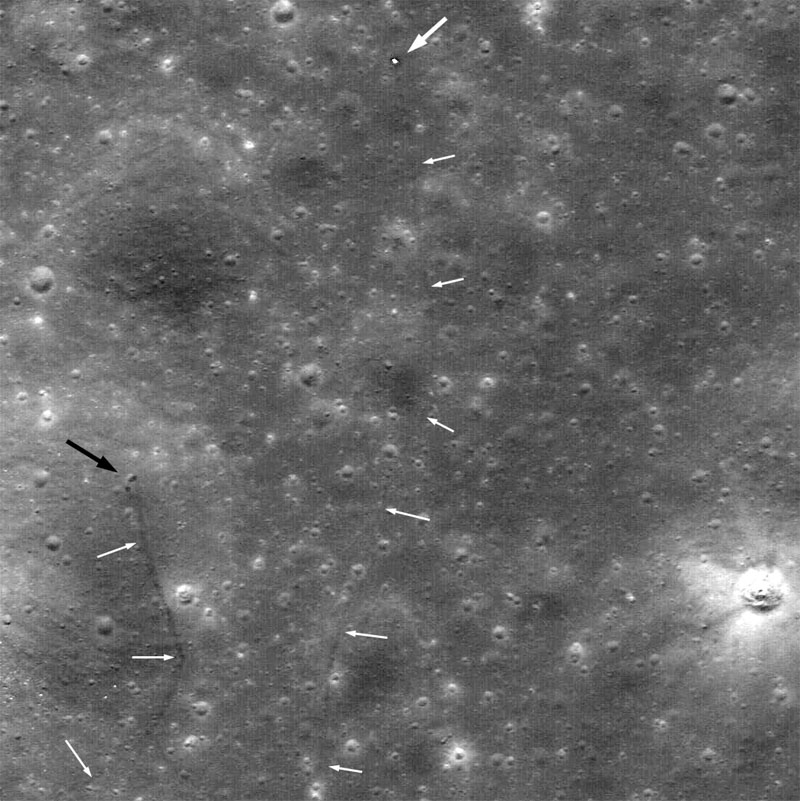
루노호트 2호는 달 레이저 거리 측정 실험을 통해 현재도 감지되고 있으며, 그 위치는 매우 정밀하게 파악되고 있다.[14] 2010년 웨스턴 온타리오 대학교의 필 스투크 교수는 달 정찰 궤도선의 이미지를 통해 루노호트 2호의 최종 위치를 확인했다고 발표하기도 했다.[15][16][22]
6. 1. 위치 확인
월면 레이저 거리 측정 실험을 통해 계속 탐지되고 있으며, 위치는 1미터 미만의 정확도로 알려져 있다.[14] 2010년 3월 17일, 웨스턴 온타리오 대학교의 필 스투크는 NASA 달 정찰 궤도선(LRO) 이미지에서 ''루노호트 2호''를 발견했다고 발표했지만,[15][16][22] 이후 이미지에서 초기 식별이 잘못된 것으로 나타났다(식별된 지점은 ''루노호트 2호''가 방향을 전환할 때 경로의 끝 부분 근처에 남겨진 자국이었다). LRO LROC 팀은 2012년 3월에 로버의 정확한 위치를 확인했다.[5][17] LROC에서 얻은 ''루노호트 2호'' 이미지는 ASU의 SESE 사이트에 마크 로빈슨이 게재했다.[18]루노호트 2호는 달 레이더 측정 실험에서 계속 감지되어, 그 위치가 50cm 단위의 정밀도로 파악되었다.[30] 2010년 3월 17일, 웨스턴온타리오 대학교의 필 스토크 교수는 루나 정찰 궤도선의 데이터로 만들어진 이미지로부터 루노호트 2호의 최종 정지 위치를 특정하여 공표했다.[31][32][36]
6. 2. 소유권 분쟁
루노호트 2호와 루나 21호 착륙선의 소유권은 1993년 12월 뉴욕 소더비 경매에서 라보킨 협회가 68500USD에 판매했다.[22][19]구매자는 컴퓨터 게임 기업가이자 우주 관광객인 리처드 개리엇(우주 비행사 오웬 K. 개리엇의 아들)이었다. 그는 2001년 ''컴퓨터 게임 매거진''과의 인터뷰에서 다음과 같이 말했다.
"저는 러시아로부터 루나코트 21을 구입했습니다. 저는 현재 다른 천체에 있는 물건을 개인적으로 소유한 세계 유일의 사람입니다. 어떤 정부도 지구 밖의 지리에 대한 권리를 주장할 수 없다는 국제 조약이 있지만, 저는 정부가 아닙니다. 요약하자면, 저는 로드 브리티시의 이름으로 달을 소유합니다!"[21]
개리엇은 이후 자신이 ''루노호트 2호''의 소유주임을 확인했다.[22][23][24]
참조
[1]
웹사이트
Lunokhod 02
https://solarsystem.[...]
NASA Solar System Exploration
2021-04-18
[2]
웹사이트
Luna 21/Lunokhod 2
https://nssdc.gsfc.n[...]
NSSDC Catalog
2017-03-21
[3]
간행물
Laser observations of the moon: Normal points for 1973
https://ntrs.nasa.go[...]
NTRS
1975-01-01
[4]
뉴스
The Other Moon Landings
http://www.airspacem[...]
Air & Space/Smithsonian
2004-03-01
[5]
웹사이트
New NASA snap of game developer's electric cart FOUND ON MOON: Probe in low pass over Garriott's radioactive tub-rover
https://www.theregis[...]
2012-03-16
[6]
뉴스
Lunokhod 2 Revisited
http://lroc.sese.asu[...]
NASA
2012-03-13
[7]
웹사이트
Is Opportunity near Lunokhod's distance record? Not as close as we used to think!
http://www.planetary[...]
The Planetary Society
2013-06-21
[8]
간행물
Space rovers in record race
Nature News
2013-06-19
[9]
뉴스
It's Official! NASA confirms Mars Opportunity rover has broken the off-world driving record
http://www.theweathe[...]
theweathernetwork.com
2014-07-29
[10]
뉴스
Trundling Across the Moon
http://lroc.sese.asu[...]
sese.asu.edu
2014-05-23
[11]
뉴스
NASA's Mars rover ''Opportunity'' breaks off-world driving record
http://www.cbsnews.c[...]
Space.com
2014-07-29
[12]
웹사이트
NASA Long-Lived Mars Opportunity Rover Sets Off-World Driving Record
http://www.jpl.nasa.[...]
2014-07-28
[13]
웹사이트
NASA's Opportunity Rover Sets A Record For Off-World Driving
https://www.forbes.c[...]
2014-07-29
[14]
웹사이트
Lunar Geophysics, Geodesy, and Dynamics
http://ilrs.gsfc.nas[...]
ilrs.gsfc.nasa.gov
[15]
웹사이트
Russian Lunar Rover Found: 37-Year-Old Space Mystery Solved
https://www.scienced[...]
[16]
뉴스
NASA Lunar Orbiter Spots Old Soviet Moon Landers
http://www.space.com[...]
2010-03-18
[17]
뉴스
LROC Coordinates of Robotic Spacecraft 2013
https://www.nasa.gov[...]
NASA
2013-09-25
[18]
뉴스
Lunokhod 2 Revisited
http://lroc.sese.asu[...]
LROC, SSE, Arizona State University
[19]
뉴스
The Bloc on the Block
http://discovermagaz[...]
Discover magazine
1994-04
[20]
문서
Sotheby's Catalogue – Russian Space History
1993-12-11
[21]
뉴스
Lord British, we hardly knew ye
http://demiurg.net/g[...]
2001-04-13
[22]
뉴스
After 17 Years, a Glimpse of a Lunar Purchase
https://www.nytimes.[...]
2010-03-20
[23]
뉴스
The Astronaut's Son's Secret Sputnik
http://www.collectsp[...]
CollectSPACE
2007-10
[24]
웹사이트
Are We Alone
http://radio.seti.or[...]
2007-12-10
[25]
웹사이트
Laser observations of the moon: Normal points for 1973
http://ntrs.nasa.gov[...]
NTRS
[26]
웹사이트
ババキンの傑作(2)
http://spacesite.biz[...]
[27]
뉴스
"The Other Moon Landings"
http://www.airspacem[...]
[28]
뉴스
oviet Moon Rover Drove Farther than Thought – Report
http://en.rian.ru/sc[...]
RIA Novosti
2013-07-11
[29]
웹사이트
Lunokhod 2 found! .... and guess who found it?
http://www.unmanneds[...]
unmannedspaceflight.com
2010-03-17
[30]
웹사이트
Lunar Geophysics, Geodesy, and Dynamics
http://ilrs.gsfc.nas[...]
ilrs.gsfc.nasa.gov
[31]
웹사이트
Russian Lunar Rover Found: 37-Year-Old Space Mystery Solved
http://www.scienceda[...]
Science Daily
[32]
뉴스
NASA Lunar Orbiter Spots Old Soviet Moon Landers
http://www.space.com[...]
2010-03-18
[33]
뉴스
The Bloc on the Block
http://discovermagaz[...]
Discover magazine
1994-04
[34]
문서
Sotheby's Catalogue - Russian Space History
1993-12-11
[35]
웹사이트
Lord British, we hardly knew ye
http://demiurg.net/g[...]
[36]
뉴스
After 17 Years, a Glimpse of a Lunar Purchase
http://www.nytimes.c[...]
2010-03-20
[37]
웹사이트
The Astronaut's Son's Secret Sputnik, CollectSPACE October 2007
http://www.collectsp[...]
[38]
간행물
Are We Alone (podcast interview with SETI Institute Director Seth Shostak), December 10, 2007
http://radio.seti.or[...]
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com