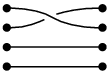
)로 정의된 X^n 의 모든 부분 공간을 제거한다. 이는 대칭군에 불변이며, Y 는 제외되지 않은 n -튜플의 대칭군에 의한 몫이다. Y 는 연결되어 있다.n 개의 끈을 가진 X 의 꼬임군'''은 Y 의 기본군으로 정의된다 (기저점 선택은 동형사상까지 잘 정의됨). X 가 유클리드 평면인 경우가 아르틴의 원래 경우이다. Y 의 더 높은 호모토피 군 은 자명하다.n=4 일 때, 4개의 점이 두 쌍으로 일렬로 늘어서 있고, 그 사이를 잇는 평행한 끈 4개가 있는 그림과 같은 상황을 생각한다.\sigma_1, \sigma_2, \sigma_3 를 고려한다.
]]|]]\sigma_1 ]]\sigma_2 ]]\sigma_3
\sigma_1, \sigma_2, \sigma_3 및 그 교차의 상하를 반전시킨 연산을 반복하여 하나의 끈 상태를 만든다. 이를 '''브레이드''' 또는 '''땋은 끈'''이라고 한다.B_4 는 \sigma_1, \sigma_2, \sigma_3 를 생성원으로 하는 군이며, 기본 관계식은 다음과 같다.\sigma_1 \sigma_3 = \sigma_3 \sigma_1 \sigma_1 \sigma_2 \sigma_1 = \sigma_2 \sigma_1 \sigma_2 \sigma_2 \sigma_3 \sigma_2 = \sigma_3 \sigma_2 \sigma_3 라이데마이스터 이동 III형
2. 1. 꼬임군의 표현
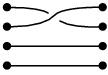
n영어 가닥의 꼬임군 \operatorname{Braid}(n) 은 다음과 같은 생성원과 관계식을 갖는 유한생성군으로 표현될 수 있다.영어 )이라고 한다.\operatorname{Braid}(n)= \left \langle \sigma_1,\ldots,\sigma_{n-1}| \sigma_i\sigma_{i+1}\sigma_i=\sigma_{i+1}\sigma_i\sigma_{i+1}, \sigma_i\sigma_j=\sigma_j\sigma_i \right \rangle i=1,2,\dots,n-2 이고, 두 번째 관계식은 |i-j|\ge2 이다.\sigma_i 는 i번째 가닥과 i+1번째 가닥을 한 번 꼬는 것을 나타낸다. 예를 들어, 4가닥의 꼬임군(\operatorname{Braid}(4) )의 생성원은 다음과 같다.σ1 σ2 σ3 σ2 σ3
꼬임의 연산 예시 -- · -- = σ3 σ2
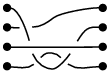
\sigma_i\sigma_{i+1}\sigma_i=\sigma_{i+1}\sigma_i\sigma_{i+1} \sigma_i\sigma_j=\sigma_j\sigma_i\qquad(|i-j|\ge2) 호모토피 적 동치 관계를 나타낸다. 즉, 꼬임을 어떻게 변형하더라도 꼬임의 연결 관계가 변하지 않으면 같은 꼬임으로 간주한다는 의미이다.
2. 2. 무한 꼬임군
꼬임군 사이에는 다음과 같은 포함 관계가 존재한다.\operatorname{Braid}(n)\hookrightarrow\operatorname{Braid}(n+1) \sigma_i^{(n)}\mapsto\sigma_i^{(n+1)} 귀납적 극한 을 취하면 '''무한 꼬임군''' \operatorname{Braid}(\infty) 을 얻는다.\operatorname{Braid}(\infty)=\varinjlim_n\operatorname{Braid}(n) f \colon B_n \to B_{n+1} 는 B_{n} 의 n-1 개의 생성자를 B_{n+1} 의 처음 n-1 개의 생성자로 보낸다(즉, 자명한 가닥을 부착함으로써). 그러나 이 군은 연속성을 유지하면서 거리화 가능한 위상을 허용하지 않는다.위상 이 있으며, 각각의 완비 가 다른 군을 생성한다는 것을 보였다.(0, 1/n) 에 가닥을 놓고, 꼬임—꼬임은 함수가 종점에서의 순열을 생성하도록 (0, 1/n, 0) 에서 (0, 1/n, 1) 까지의 경로들의 모음으로 정의됨—의 집합은 이 더 거친 군과 동형이다. 흥미로운 사실은 이 군에서의 순수 꼬임군은 유한 순수 꼬임군 P_n 의 역 극한과 힐베르트 큐브에서 집합\{(x_i)_{i\in \mathbb{N}} \mid x_i=x_j\text{ for some }i\ne j\}. 기본군 과 동형이라는 것이다.2. 3. 드오르누아 순서
꼬임군 \operatorname{Braid}(n) 위에는 '''드오르누아 순서'''(Dehornoy order영어 )라는 전순서가 존재하며, 이는 군의 왼쪽 작용에 대하여 불변이다. 구체적으로, 드오르누아 순서에서 양인 원소는 \sigma_1,\dots,\sigma_{n-1} 들과 이들의 역원의 곱으로 만든 문자열 가운데 적어도 한 i\in\{1,\dots,n-1\} 가 다음 세 조건을 모두 만족시키는 것이다.문자열은 \sigma_i 를 포함한다. 모든 j에 대하여, 문자열은 \sigma_j 를 포함하지 않는다. 모든 j\le i 에 대하여, 문자열은 \sigma_j^{-1} 를 포함하지 않는다. P 라고 하면, PP\subseteq P 이며, 꼬임군은\operatorname{Braid}(n)=P\sqcup P^{-1}\sqcup\{1\}
3. 성질
꼬임군의 모든 원소는 항등원을 제외하고 무한한 차수를 갖는다. n ≥ 2일 때, Bₙ은 두 개의 원소로 생성되는 자유군 을 부분군으로 갖는다.
꼬임군 B_1 은 자명군 이며, B_2 는 무한 순환군 \Z 이고, B_3 는 매듭군 중 세잎 매듭의 매듭군과 동형이며, 특히 무한 비가환군이다. n -가닥 꼬임군 B_n 은 처음 n 개의 가닥을 교차하지 않는 추가 가닥을 더함으로써 (n+1) -가닥 꼬임군 B_{n+1} 의 부분군 으로 포함된다. 모든 n \ge 1 에 대한 꼬임군의 증가하는 합집합은 '''무한 꼬임군''' B_{\infty} 이다.B_n 의 모든 비항등원은 무한 차수를 가진다. 즉, B_n 은 꼬임이 없는 군이다.B_n 에는 Dehornoy 순서라고 불리는 좌불변 선형 순서가 존재한다.n\ge 3 에 대해, B_n 은 두 개의 생성원에 대한 자유군 과 동형인 부분군을 포함한다.\sigma_i \mapsto 1 에 의해 정의된 군 준동형사상 B_n \to \Z 가 존재한다. 예를 들어, 꼬임 \sigma_2\sigma_3\sigma_1^{-1}\sigma_2\sigma_3 은 1 + 1 - 1 + 1 + 1 = 3 으로 매핑된다. 이 맵은 꼬임군의 가환화에 해당한다. \sigma_i^k \mapsto k 이므로, \sigma_i^k 는 k=0 일 때만 항등원이 된다. 이것은 생성원이 무한 차수를 갖는다는 것을 증명한다.3. 1. 몫군
꼬임군의 아벨화는 무한 순환군이다. 구체적으로는 다음과 같다.\sigma_i\mapsto 1\qquad(i=1,\dots,n-1) \sigma_i^{-1}\mapsto -1\qquad(i=1,\dots,n-1) 대칭군 을 다음과 같이 몫군 으로 갖는다.\operatorname{Braid}(n)\twoheadrightarrow\operatorname{Sym}(n)=\operatorname{Sym}(\{1,2,\dots,n\}) \sigma_i\mapsto(i,i+1)\qquad(i=1,\dots,n-1) \sigma_i^{-1}\mapsto(i,i+1)\qquad(i=1,\dots,n-1) 3. 2. 중심
n \ge 3 일 때, 꼬임군 \operatorname{Braid}(n) 의 중심은 다음과 같은 원소로 생성되는 무한 순환군이다.\left(\sigma_1(\sigma_2\sigma_1)\cdots(\sigma_{n-1}\sigma_{n-2}\cdots\sigma_1)\right)^2 n \le 2 일 경우, 꼬임군은 아벨 군 이므로 군 전체가 중심이다.
4. 예
꼬임군 동형인 군 \operatorname{Braid}(0) 자명군 \operatorname{Braid}(1) 자명군 \operatorname{Braid}(2) 무한 순환군 \mathbb Z \operatorname{Braid}(3) 세잎매듭 의 매듭군 \pi_1(S^3\setminus 3_1) , 모듈러 군의 중심 확대
4. 1. 3차 꼬임군
3가닥 꼬임군 \operatorname{Braid}(3) 은 가장 낮은 가닥 수의 비가환 꼬임군이다. 이 군은 세잎매듭 31 의 매듭군 \pi_1(S^3\setminus 3_1) 과 동형이며, 모듈러 군 \operatorname{PSL}(2;\mathbb Z) 의 중심 확대이다.\overline{\operatorname{SL}(2;\mathbf R)} 은 \operatorname{SL}(2;\mathbb R) 의 범피복군이다. 모듈러 군은 중심이 없으므로, 모듈러 군은 \operatorname{Braid}(n) 의 중심에 대한 몫군 과 동형이다.\operatorname{PSL}(2;\mathbb Z)=\operatorname{Braid}(n)/\operatorname Z(\operatorname{Braid}(n)) 3 는 모듈러 군 \Gamma 의 중심 확대이다. 즉, B_3 의 중심을 Z(B_3) 로 나타낼 때, 다음의 짧은 완전열을 만족한다.1 \to Z(B_3) \to B_3 \to \Gamma \to 1 \Gamma \cong B_3/Z(B_3) 이다.
5. 응용
꼬임군 이론은 유체 역학, 특히 유체 흐름의 혼돈 혼합 분야에 적용되었다. 물리적 막대, 주기 궤도 등의 운동으로 형성된 시공간 궤도의 꼬임은 닐센-서스턴 분류를 사용하여 여러 유체 시스템의 위상 엔트로피를 추정하는데 사용되었다.애니온 이론 및 양자 컴퓨터 연구에 응용된다. 애니온은 오류 정정 양자 컴퓨터의 기반을 형성할 수 있으며, 양자 정보에서 중요하다.
5. 1. 꼬임 지수
J. W. 알렉산더의 정리에 따르면 모든 매듭 은 꼬임의 "폐쇄"로 얻어질 수 있다.
6. 역사
꼬임군은 1925년 에밀 아르틴 에 의해 명시적으로 소개되었지만, 1974년 빌헬름 마그누스가 지적했듯이아돌프 후르비츠 의 모노드로미 에 관한 연구에 암묵적으로 나타나 있었다.에밀 아르틴 은 꼬임군을 명시적인 표현 으로 설명했다.기본군 으로 이해할 수도 있다.
7. 추가 성질
는 자명군 이고, 는 무한 순환군 이며, 는 세잎 매듭의 매듭군 과 동형이다. 에 대해, 은 두 개의 생성원을 갖는 자유군 과 동형인 부분군을 포함한다. 따라서 이 군들은 가환군이 아닌 무한군이다. 단위원을 제외한 모든 의 원소는 그 위수가 무한이다. 즉, 은 꼬임이 없다. 위에는 라고 불리는 좌불변인 전순서가 존재한다. 은 1개의 새로운 끈을 최초의 개의 끈 중 어느 것과도 교차하지 않도록 추가함으로써, -가닥의 땋임군 의 부분군 으로서 매립할 수 있다.
8. 상호 관계
꼬임군은 대칭군 , 순수 꼬임군, 모듈러 군, 사상류군 등 다양한 군들과의 관계를 맺고 있다.
대칭군 및 순수 꼬임군과의 관계: 꼬임의 교차를 무시하면, *n*개의 가닥에 대한 모든 꼬임은 *n*개의 원소에 대한 순열 을 결정한다. 이는 꼬임군에서 대칭군으로의 전사적 군 준동형사상 \(B_n → S_n\)을 정의하며, 이 준동형사상의 핵은 순수 꼬임군 \(P_n\)이다. 순수 꼬임군은 각 끈의 시작점과 종점이 같은 위치에 있는 꼬임들로 구성된다.모듈러 군과의 관계: 3가닥 꼬임군(\(B_3\))은 모듈러 군 \(\operatorname{PSL}(2, \mathbb Z)\)의 보편적 중심 확대이며, \(B_3\)를 그 중심 \(Z(B_3)\)로 나눈 몫군 은 모듈러 군과 동형이다.사상류군과의 관계: 꼬임군 \(B_n\)은 \(n\)개의 구멍이 뚫린 원판 의 사상류군 과 동형이다. 이를 통해 각 꼬임은 주기적, 가약 또는 유사 아노소프로 분류할 수 있다.8. 1. 대칭군 및 순수 꼬임군과의 관계
꼬임의 교차를 무시하면, *n*개의 가닥에 대한 모든 꼬임은 *n*개의 원소에 대한 순열 을 결정한다. 이는 꼬임군에서 대칭군 으로의 전사적 군 준동형사상 *Bn * → *Sn *을 정의한다. 꼬임 σ*i* ∈ *Bn *의 이미지는 전위 *si * = (*i*, *i*+1) ∈ *Sn *이다.n * → *Sn *의 핵은 *n*개의 가닥에 대한 순수 꼬임군 이라 불리며 *Pn *으로 표기되는 *Bn *의 부분군이다. 순수 꼬임군은 다음 짧은 완전열을 만족한다.n-1 →Pn →Pn-1 →1.반직접곱 으로 구성된다.8. 2. B₃와 모듈러 군의 관계
3가닥 꼬임군(B_3 )은 모듈러 군 \operatorname{PSL}(2,\mathbb Z) 의 보편적 중심 확대이다. 모듈러 군은 자명한 중심을 가지므로, B_3 를 그 중심 Z(B_3) 로 나눈 몫군 과 동형이다. 이는 B_3 의 내부 자기 동형의 군과 동형이다.동형 사상 에 대한 설명이다.a = \sigma_1 \sigma_2 \sigma_1, \quad b = \sigma_1 \sigma_2 a^2 = b^3 가 성립한다. 이 마지막 곱을 c 로 표시하면, 꼬임 관계로부터 다음이 성립한다.\sigma_1 c \sigma_1^{-1} = \sigma_2 c \sigma_2^{-1}=c c 가 B_3 의 중심에 있음을 의미한다. C 를 c 에 의해 생성된 B_3 의 부분군 으로 나타내면, C \subset Z(B_3) 이므로, 이는 정규 부분군 이며 몫군 B_3/C 를 취할 수 있다. B_3/C \cong \operatorname{PSL}(2,\mathbb Z) 이며, 이 동형 사상은 다음과 같이 주어진다. 잉여류 \sigma_1 C 및 \sigma_2 C 는 다음으로 매핑된다.\sigma_1C \mapsto R=\begin{bmatrix}1 & 1 \\ 0 & 1 \end{bmatrix} \qquad \sigma_2C \mapsto L^{-1}=\begin{bmatrix}1 & 0 \\ -1 & 1 \end{bmatrix} L 및 R 은 슈테른-브로코 트리의 표준 좌/우 이동이며, 이러한 이동은 모듈러 군을 생성한다.표현 중 하나는 다음과 같다.\langle v,p\, |\, v^2=p^3=1\rangle v=\begin{bmatrix}0 & 1 \\ -1 & 0 \end{bmatrix}, \qquad p=\begin{bmatrix}0 & 1 \\ -1 & 1 \end{bmatrix}. a 를 v 로, b 를 p 로 매핑하면 전사 군 준동형사상 B_3 \to \operatorname{PSL}(2,\mathbb Z) 가 생성된다.B_3 의 중심은 C 와 같으며, 이는 c 가 중심에 있다는 사실, 모듈러 군이 자명한 중심을 갖는다는 사실, 그리고 위의 전사 준동형사상이 핵 C 를 갖는다는 사실의 결과이다.B_3 는 모듈러 군의 보편적 중심 확대이다.8. 3. 사상류군과의 관계 및 꼬임의 분류
꼬임군 \(B_n\)은 \(n\)개의 구멍이 뚫린 원판 의 매핑 클래스 군과 동형이다. 이는 각 구멍이 원판의 경계와 끈으로 연결되어 있다고 상상하면 시각적으로 이해하기 쉽다. 두 구멍을 치환하는 각 매핑 준동형은 끈의 호모토피, 즉 끈들의 꼬임으로 볼 수 있다.e 곱셈의 예 a b ab 예1 ]] ]] ]] 예2 ]] ]] ]]
역원 이 존재한다. 따라서 브레이드는 위의 곱에 관해 군이 되며, 이 군이 \(B_4\)이다.사상류군 과 동형이다. 이는 사상류군의 각 원소가 구멍끼리 서로 바꾸므로, 원래 작용 전후의 같은 위치에 있는 구멍을 잇는 끈의 집합을 브레이드로 간주함으로써 브레이드와 대응시킬 수 있기 때문이다.
9. 매듭 이론과의 연관성
꼬임의 양 끝을 연결하면 고리 또는 매듭 을 얻을 수 있다. 알렉산더 정리에 따르면, 모든 매듭과 고리는 적어도 하나의 꼬임으로부터 이러한 방식으로 발생한다.바운 존스 는 원래 자신의 존스 다항식 을 꼬임 불변량으로 정의한 다음, 닫힌 꼬임의 클래스에만 의존한다는 것을 보였다. 1935년에 마르코프는 해당 닫힌 꼬임에서 동치를 생성하는 꼬임 다이어그램에 대한 두 가지 움직임을 설명했다.
10. 계산적 측면
단어 문제는 효율적으로 해결 가능하며 생성자 σ|σ영어 , ..., σ에 대한 ''B''}}의 원소에 대한 정규 형식이 존재한다. 자유 GAP 컴퓨터 대수 시스템은 원소가 이러한 생성자를 기준으로 주어지는 경우 ''B''}}에서 계산을 수행할 수 있다. 또한 꼬임군을 특별히 지원하는 GAP3용 ''CHEVIE''라는 패키지도 있다. 단어 문제는 로렌스-크래머 표현을 통해 효율적으로 해결된다.암호화 분야에서 적용될 수 있다고 제안되었다.
11. 작용
대칭군의 순열에 의한 작용과 유사하게, 다양한 수학적 설정에서 꼬임군 은 "꼬임"을 포함하는 대상의 ''n''-튜플 또는 ''n''-겹 텐서 곱에 자연스러운 작용을 한다. 임의의 군 ''G''를 고려하고 ''X''를 ''G''의 원소의 모든 ''n''-튜플의 집합으로 정의하며, 곱이 ''G''의 항등원 이 되도록 한다. 그러면 ''Bn ''은 다음과 같은 방식으로 작용한다.\sigma_i \left (x_1,\ldots,x_{i-1},x_i, x_{i+1},\ldots, x_n \right)= \left (x_1,\ldots, x_{i-1}, x_{i+1}, x_{i+1}^{-1}x_i x_{i+1}, x_{i+2},\ldots,x_n \right ). i ''와 ''x''''i''+1 ''은 자리를 바꾸고, 추가적으로 ''xi ''는 ''x''''i''+1 ''에 해당하는 내부 자기 동형에 의해 꼬인다. 이는 ''x''의 구성 요소의 곱이 항등원으로 유지되도록 한다. 꼬임군 관계가 만족하는지 확인할 수 있으며, 이 공식은 실제로 ''Bn ''의 ''X''에 대한 군 작용을 정의한다. 또 다른 예로, 꼬임 모노이드 범주는 꼬임군 작용을 갖는 모노이드 범주 이다. 이러한 구조는 현대 수리 물리학에서 중요한 역할을 하며, 양자 매듭 불변량 으로 이어진다.
12. 표현
꼬임군 ''Bn ''의 원소는 행렬로 더 구체적으로 표현될 수 있다. 이러한 고전적인 표현 중 하나는 행렬 요소가 단일 변수 로랑 다항식 인 부라우 표현이다. 부라우 표현이 충실한 표현인지에 대한 오랜 질문이 있었지만, ''n'' ≥ 5에 대해 부정적인 것으로 밝혀졌다.영어 와 t영어 에 의존하는 차원 n(n-1)/2 의 로렌스-크라머 표현을 사용했다. 이러한 변수를 적절하게 특수화함으로써 꼬임군 B_n 은 복소수 에 대한 일반 선형군의 부분군으로 실현될 수 있다.n ''영어 의 선형 표현으로 고전적인 Burau 표현|en|Burau representation한국어 이나, Lawrence-Krammer(-Bigelow) 표현|en|Lawrence–Krammer representation한국어 이 알려져 있다.로랑 다항식 환의 일반 선형군으로 간주될 수 있다. B_n \to GL_{n-1}(\Z[\Z]). n \ge 5 에 대해서는 그렇지 않다는 것이 밝혀졌다.로랑 다항식 환의 일반 선형군으로 간주될 수 있다. B_n \to GL_{\binom n2}(\Z[\Z^2]). 프랭크 윌첵 은 SO(3)영어 의 사영 표현의 유사점으로 브레이드 군의 사영 표현이 분수 양자 홀 효과에 관한 준입자 에 관한 물리적 의미를 갖는다고 제창했다.
13. 무한 생성 꼬임군
무한 가닥으로 꼬임군을 일반화하는 방법은 여러 가지이다. 가장 간단한 방법은 꼬임군들의 직접 극한을 취하는 것이지만, 이 군은 연속성을 유지하면서 거리화 가능한 위상을 허용하지 않는다.위상 을 통해 완비 가 되는 서로 다른 군을 생성할 수 있음을 보였다.(0, 1/n) 에 가닥을 놓고, 꼬임(함수가 종점에서의 순열을 생성하도록 (0, 1/n, 0) 에서 (0, 1/n, 1) 까지의 경로들의 모음으로 정의됨)의 집합은 이 더 거친 군과 동형이다. 이 군에서의 순수 꼬임군은 유한 순수 꼬임군 P_n 의 역 극한과 힐베르트 큐브에서 특정 집합을 뺀 공간의 기본군 과 동형이다.
14. 코호몰로지
군 코호몰로지 G 의 코호몰로지는 해당 Eilenberg–MacLane 분류 공간 K(G, 1) 의 코호몰로지로 정의되며, 이 공간은 G 에 의해 호모토피까지 고유하게 결정되는 CW 복합체 이다. 꼬임군 B_n 의 분류 공간은 평면(\R^2 )에서 서로 다른 n 개의 점들의 모든 집합의 공간(번째 정렬되지 않은 배치 공간)이다.\operatorname{UConf}_n(\R^2) = \{ \{u_1, ..., u_n\} : u_i \in \R^2, u_i \neq u_j \text{ for } i \neq j \} .\Z/2\Z 인 계산은 Fuks (1970)에서 찾을 수 있다.P_n 의 분류 공간은 평면(\R^2 )의 번째 ''정렬된'' 배치 공간 \operatorname{Conf}_n(\R^2) 이다. 1968년 블라디미르 아르놀트 (Vladimir Arnold)는 순수 꼬임군 P_n 의 정수 코호몰로지가 다음 관계식을 만족하는 차수 1인 클래스 \omega_{ij} \; \; 1 \leq i < j \leq n 의 모음으로 생성된 외대수 의 몫이라고 밝혔다:\omega_{k,\ell} \omega_{\ell,m} + \omega_{\ell,m} \omega_{m,k} + \omega_{m,k} \omega_{k,\ell} =0.
참조
[1]
웹사이트
Braid Group
http://mathworld.wol[...]
[2]
논문
The Braid Monodromy of Plane Algebraic Curves and Hyperplane Arrangements
1997
[3]
간행물
Topological fluid mechanics of stirring
http://www.math.ufl.[...]
[4]
간행물
Topological mixing with ghost rods
[5]
간행물
Topological chaos and periodic braiding of almost-cyclic sets
[6]
간행물
Über die freie Äquivalenz der geschlossenen Zöpfe
http://mi.mathnet.ru[...]
[7]
간행물
Markov's theorem in 3-manifolds
[8]
서적
Braids, links, and mapping class groups
Princeton University Press
[9]
웹사이트
Braid Index
http://mathworld.wol[...]
MathWorld – A Wolfram Web Resource
2014-08
[10]
서적
Proceedings of the Second International Conference on the Theory of Groups
Springer
[11]
논문
Theory of Braids
1947
[12]
논문
The braid groups
[13]
arXiv
BRAIDS: A SURVEY
2004
[14]
웹사이트
Introduction to Braid Groups
https://www.math.uch[...]
[15]
arXiv
Braid Group Cryptography
2009
[16]
간행물
"{{math|2''n''}} Quasihole States Realize {{math|2''n''-1 }}-Dimensional Spinor Braiding Statistics in Paired Quantum Hall States"
1996
[17]
간행물
Completing Artin's braid group on infinitely many strands
[18]
서적
Braids
World Scientific
2009-12-01
[19]
논문
Cohomology of the braid group mod 2
[20]
논문
The cohomology ring of the colored braid group
http://www.pdmi.ras.[...]
[21]
서적
Proceedings of the Second International Conference on the Theory of Groups
Springer
[22]
간행물
"{{math|2''n''}} Quasihole States Realize {{math|2''n''-1 }}-Dimensional Spinor Braiding Statistics in Paired Quantum Hall States"
1996
[23]
arXiv
Braid Group Cryptography
2009
[24]
저널
Basic results on braid groups
CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.help@durumis.com