이족보행
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
이족보행은 두 발로 걷는 방식을 의미하며, 라틴어에서 유래된 용어이다. 이족보행은 시야 확보, 물속 이동, 먹이 접근성 향상 등의 이점을 제공하며, 일부 동물에게는 다른 사지를 자유롭게 사용할 수 있게 해준다. 이족보행은 선택적 또는 의무적으로 분류되며, 서기, 걷기, 달리기, 잘게 걷기, 점프/뛰기 등의 다양한 방식이 존재한다. 이족보행은 파충류, 공룡, 조류, 포유류 등 다양한 동물에서 나타나며, 인간은 직립 이족보행을 하는 유일한 영장류이다. 인간의 이족보행 진화는 뇌 크기 증가, 석기 도구 사용 이전부터 시작되었으며, 다양한 가설이 존재한다. 이족보행은 좁은 골반, 어려운 분만, 생리적 적응 등 다양한 결과를 가져왔으며, 생체역학, 근육, 호흡 등 여러 측면에서 특징을 보인다. 최근에는 이족보행 로봇 개발이 이루어지고 있다.
더 읽어볼만한 페이지
- 2 - 이진법
이진법은 0과 1 두 개의 숫자를 사용하는 밑이 2인 위치 기수법으로, 컴퓨터 과학의 기초가 되었으며 현대 컴퓨터에서 데이터를 저장하고 처리하는 데 사용된다. - 2 - 페어 스케이팅
페어 스케이팅은 두 선수가 함께 스케이팅하며 고난도 기술을 구사하는 피겨 스케이팅 종목으로, 쇼트 프로그램과 프리스케이팅으로 구성되며, 1908년 하계 올림픽에서 정식 종목으로 채택되었다. - 걷기 - 산책
산책은 걷는 행위를 의미하며 건강 증진, 사회문화적 활동, 취미 활동 등 다양한 의미를 지니고 있으며, 교통사고, 범죄, 건강 문제에 유의해야 한다. - 걷기 - 길
길은 사람들의 이동을 위해 만들어진 통행로로, 과거에는 생활 통로로 이용되었고 현재는 다양한 목적으로 활용되지만, 도시와 시골 지역 모두 유지보수, 안전, 환경 문제 등 여러 문제점을 안고 있다. - 동물해부학 - 아가미
아가미는 수생 동물이 물속에서 산소를 흡수하도록 돕는 다양한 형태의 호흡 기관이며, 얇은 구조와 역류 교환 메커니즘을 통해 효율적인 기체 교환을 가능하게 한다. - 동물해부학 - 외골격
외골격은 다양한 생물에서 발견되는 외부 보호막 또는 지지 구조로, 포식 방어, 근육 부착, 탈수 방지 등의 역할을 하며, 화석 연구에 기여하고 신소재 개발에 영감을 주지만, 화석 기록 편향과 해양 환경의 영향을 받는다.
| 이족보행 |
|---|
2. 용어
"이족보행"이라는 단어는 '둘'을 뜻하는 라틴어 단어 ''bi(s)''와 '발'을 뜻하는 ''ped-''에서 유래되었으며, '네 발'을 뜻하는 사족보행과 대조된다.
이족 보행은 머리를 들어 올려 더 넓은 시야를 확보하여 멀리 있는 위험이나 자원을 더 잘 감지할 수 있게 하고, 물속을 걸어 다니는 동물들이 더 깊은 물에 접근할 수 있게 하며, 동물들이 입으로 더 높은 곳에 있는 먹이에 닿을 수 있게 한다.[6] 직립 상태에서, 움직임에 사용되지 않는 사지는 조작(영장류와 설치류), 비행(조류), 굴착(자이언트천산갑), 전투(곰, 거대한 유인원 및 큰 왕도마뱀) 또는 위장 등 다른 용도로 자유롭게 사용할 수 있다.
동물학자들은 이족보행을 "선택적" 또는 "의무적"으로 분류하기도 하지만, 이 구분은 명확하지 않다. 이족보행과 관련된 여러 가지 움직임 상태가 있다.
대부분의 육상 척추동물은 사족보행을 하며, 이족보행은 소수의 그룹에서만 나타난다. 인간, 긴팔원숭이, 대형 조류는 한 발씩 들면서 보행한다. 반면, 대부분의 캥거루과 동물, 작은 새, 여우원숭이, 두 발로 걷는 설치류는 두 다리로 동시에 점프하여 이동한다. 나무캥거루는 걷거나 점프할 수 있으며, 나무 위에서 이동할 때는 주로 발을 번갈아 가며, 땅에서는 두 발로 동시에 점프한다.[21]
3. 이점
최대 이족 보행 속도는 유연한 척추를 가진 사족 보행의 최대 속도보다 느린 것으로 보인다. 타조와 붉은캥거루는 모두 70km의 속도에 도달할 수 있는 반면, 치타는 100km를 초과할 수 있다.[6][7] 이족 보행이 처음에는 느리지만, 장거리에서는 지구력 달리기 가설에 따르면 인간이 다른 대부분의 동물보다 더 오래 달릴 수 있게 해준다.[8] 캥거루쥐의 이족 보행은 이동 능력을 향상시키는 것으로 가설이 제기되었으며, 이는 포식자로부터 도망치는 데 도움이 될 수 있다.[9][10]
4. 방식
# 서기. 두 다리로 가만히 서 있는 상태. 대부분의 이족보행에서는 끊임없이 균형을 조절해야 하는 능동적인 과정이다.
# 걷기. 한 발을 다른 발 앞에 두고, 항상 적어도 한 발이 땅에 닿아 있는 상태.
# 달리기. 한 발을 다른 발 앞에 두고, 두 발이 모두 땅에서 떨어지는 순간이 있는 상태.
# 잘게 걷기. 때때로 해군 사관학교 신병과 유사하다고 묘사되는 방식으로 움직이는 것.
# 점프/뛰기. 두 발을 함께 움직여 일련의 점프로 이동하는 것.
사족 보행에서의 이동(Locomotion)은 사지의 움직임에 따라 갤럽, 트로트, 페이스, 워크, 하프 바운드, 프롱크 등으로 분류되지만, 이족 보행의 경우에는 보다 단순화되어 호핑, 러닝, 워킹, 스킵으로 나뉜다.[106] 호핑은 좌우 다리를 (거의) 동시에 앞으로 내는 방식이다.[106] 워킹과 러닝은 좌우 다리를 번갈아 앞으로 내는 방식이다.[106]
조류의 경우에는 분류군에 따라 선호하는 이동 방식이 다르다.[106] 예를 들어 참새목이나 딱따구리목에서는 호핑이 기본이 된다.[106] 사람의 이족 보행은 워킹과 러닝이 주를 이루며 호핑은 기본적으로 하지 않는다.[106] 좌우 다리를 번갈아 앞으로 내는 방식 중 양 발이 땅에서 떨어지는 시간이 있는 것이 러닝이며, 사람의 경우에는 비교적 구별하기 쉽다.[106] 반면, 조류는 사람과는 기본적인 자세가 크게 다르기 때문에 한 걸음의 길이와 속도, 발의 움직임 등에서 러닝을 하고 있는 것으로 보일 때에도 양 발이 땅에서 떨어지는 시간이 없는 경우가 있다.[106]
덧붙여, 스킵은 매우 특수한 방식으로 사람에게서만 나타난다.[106]
5. 이족보행을 하는 동물
이족 보행은 종에게 몇 가지 이점을 제공할 수 있다. 머리를 들어 올려 더 넓은 시야를 확보하여 멀리 있는 위험이나 자원을 더 잘 감지할 수 있게 하고, 물속을 걸어 다니는 동물들이 더 깊은 물에 접근할 수 있게 하며, 입으로 더 높은 곳에 있는 먹이에 닿을 수 있게 한다. 직립 상태에서, 움직임에 사용되지 않는 사지는 조작(영장류와 설치류), 비행(조류), 굴착(자이언트천산갑), 전투(곰, 거대한 유인원, 큰 왕도마뱀) 또는 위장 등 다른 용도로 자유롭게 사용할 수 있다.[9][10]
최대 이족 보행 속도는 유연한 척추를 가진 사족 보행의 최대 속도보다 느린 것으로 보인다. 타조와 붉은캥거루는 모두 70km/h의 속도에 도달할 수 있는 반면, 치타는 100km/h를 초과할 수 있다.[6][7]5. 1. 파충류
많은 도마뱀 종은 고속 질주 시 이족보행을 한다.[5] 여기에는 세계에서 가장 빠른 도마뱀인 뿔꼬리 이구아나(속 ''크테노사우라'')가 포함된다. 에우디바무스는 최초로 알려진 이족보행 동물이며, 2억 9천만 년 전의 화석이 발견되었다.[12][13] 에우디바무스의 긴 뒷다리, 짧은 앞다리, 그리고 독특한 관절은 모두 이족보행을 시사한다. 이 종은 초기 페름기에 멸종되었다.
5. 1. 1. 공룡 및 악어
이족보행은 공룡과 악어를 모두 포함하는 원룡류에서 여러 번 진화했다.[14] 모든 공룡은 아마도 ''에오랍토르''와 유사한 완전한 이족보행 조상에서 유래한 것으로 여겨진다.
공룡은 약 2억 3천만 년 전인 트라이아스기 중후기에 원룡류 조상으로부터 분화되었는데, 이는 페름기-트라이아스기 대멸종으로 지구상의 모든 생명체의 약 95%가 사라진 지 약 2천만 년 후였다.[15][16] 초기 공룡 속인 ''에오랍토르'' 화석의 방사성 연대 측정을 통해 이 시기에 화석 기록에서 존재가 확인되었다. 고생물학자들은 ''에오랍토르''가 모든 공룡의 공통 조상과 유사하다고 생각한다.[17] 만약 이것이 사실이라면, 그 특징은 최초의 공룡이 작고, 이족보행을 하는 포식자였음을 시사한다.[18] 아르헨티나 트라이아스기 중기의 지층에서 ''마라수쿠스'' 및 ''라게르페톤''과 같은 원시적인 공룡형 조류(ornithodiran)의 발견은 이러한 관점을 뒷받침한다. 회수된 화석 분석 결과, 이 동물들이 실제로 작고, 이족보행을 하는 포식자였음을 시사한다.
이족보행은 이구아노돈류와 같은 다른 여러 공룡 계통에서도 재진화했다. 조반류(공룡과 친척을 포함하는 그룹)의 자매 그룹인 가짜악어류의 멸종된 일부 구성원도 이족보행 형태를 진화시켰는데, 트라이아스기의 포포사우로이드인 ''에피지아 오키피애''가 이족보행을 했던 것으로 여겨진다.[19] 익룡은 이전에는 이족보행을 하는 것으로 생각되었지만, 최근의 발자국 연구를 통해 사족보행을 했다는 것이 밝혀졌다.
5. 1. 2. 조류
모든 새는 이족 보행을 하며, 이는 모든 수각류 공룡과 같다. 호아친 새끼는 날개에 발톱이 있어 기어오르는 데 사용한다.[14]
조류는 분류군에 따라 선호하는 이동 방식(로코모션)이 다르다.[106] 예를 들어 참새목이나 딱따구리목에서는 호핑(좌우 다리를 거의 동시에 앞으로 내는 방식)이 기본이다.[106] 조류는 사람과는 기본적인 자세가 크게 달라, 한 걸음의 길이와 속도, 발의 움직임 등에서 런닝(양 발이 땅에서 떨어지는 시간이 있는 방식)을 하는 것으로 보일 때에도 양 발이 땅에서 떨어지는 시간이 없는 경우가 있다.[106]
5. 2. 포유류
현존하는 여러 포유류 그룹이 독립적으로 이족 보행을 진화시켰다. 땅돼지, 멸종된 거대 땅늘보, 수많은 종의 뛰는 설치류와 캥거루 등이 이에 해당한다. 캥거루과는 진화 과정에서 단 한 번, 적어도 4천 5백만 년 전에 이족 보행(도약)을 진화시킨 것으로 여겨진다.[20]
대부분의 포유류는 사족 보행을 하기 때문에 이족 보행은 흔하지 않다. 비영장류 포유류 중 번갈아 가며 다리를 움직이는 보행으로 이족 보행을 하는 경우는 드물다. 땅돼지와 드물게 나무캥거루가 이에 해당한다.[21] 앞발 부상으로 이족 보행을 자주 하여 유명해진 흑곰 페달스나, 2023년 더비셔 정원에서 촬영된 두 다리로 걷는 여우(선천적 요인 추정)의 사례도 있다.[22]
쥐, 너구리, 비버 등은 물체 조작을 위해 뒷다리로 앉지만 이동할 때는 네 다리로 돌아간다. 비버는 댐을 위해 나무를 운반할 때, 너구리는 음식을 들고 있을 때 이족 보행을 하기도 한다. 곰은 앞다리를 무기로 사용하기 위해 이족 보행 자세로 싸운다. 땅다람쥐와 미어캣은 주변을 살피기 위해 뒷다리로 서지만, 이족 보행을 하지는 않는다. 개 (예: 페이트)는 훈련, 선천적 결함, 부상 등으로 인해 두 다리로 서거나 움직일 수 있다. 게렌룩 영양, 멸종된 거대한 나무늘보와 칼리코테리아는 나무에서 먹이를 먹을 때 뒷다리로 섰다. 점박이 스컹크는 위협을 받을 때 앞발로 걷기를 하며, 공격자를 마주보고 앞다리로 일어서서 항문선으로 공격적인 오일을 뿌릴 수 있다.
5. 2. 1. 영장류
모든 영장류는 어느 정도 이족보행 능력을 가지고 있지만, 대부분 육상에서 주로 사족보행을 한다. 영장류의 이족보행은 등이 거의 수직에 가깝다는 점에서 특이하다(인간의 경우 완전히 수직). 침팬지, 보노보, 고릴라, 긴팔원숭이[23], 개코원숭이[24]는 다양한 형태의 이족보행을 보인다. 땅 위에서 시파카는 모든 인드리과 동물과 마찬가지로 앞다리를 균형을 잡기 위해 위로 든 채 뒷다리로 옆으로 뛰는 이족보행 방식으로 움직인다.[25] 겔라다는 보통 네 발로 걷지만, 인접한 먹이 지역 사이를 쪼그리고 앉아 질질 끄는 이족보행 형태로 움직이기도 한다.[26]
인간은 허리를 안정시키는 척추의 추가적인 굴곡과, 인간이 아닌 유인원에 비해 다리에 비해 더 짧은 팔을 가지고 있어 일반적으로 이족보행을 하는 유일한 영장류이다.
부상당한 침팬지와 보노보는 지속적인 이족보행이 가능했다.[31] 사육된 영장류 중 마카크 나탈리아[32]와 침팬지 올리버와 포코[33]가 이족보행을 하는 것으로 밝혀졌다. 나탈리아는 질병 이후에 전적으로 이족보행으로 전환했으며, 포코는 높고 좁은 우리에서 사육되는 것이 발견되었다.[34][35] 올리버는 관절염이 생긴 후 너클 워킹으로 돌아갔다. 인간이 아닌 영장류는 음식을 운반하거나 얕은 물을 통과할 때 종종 이족보행을 사용한다.
5. 3. 제한적 이족보행
쥐, 너구리, 비버와 같은 많은 동물들은 물건을 조작하기 위해 뒷다리로 앉지만, 이동할 때는 네 다리로 돌아간다. 비버는 댐을 위해 나무를 운반할 때, 너구리는 음식을 들고 있을 때 이족 보행을 한다. 곰은 앞다리를 무기로 사용하기 위해 이족 보행 자세로 싸운다. 많은 포유류가 먹이를 먹거나 싸우는 특정 상황에서 이족 보행 자세를 취한다. 땅다람쥐와 미어캣은 주변을 살피기 위해 뒷다리로 서 있지만, 이족 보행을 하지는 않는다. 개 (예: 페이트)는 훈련을 받거나, 선천적 결함이나 부상으로 인해 네 발 짐승으로 걷는 것이 불가능할 경우 두 다리로 서거나 움직일 수 있다. 게렌룩 영양은 나무에서 먹이를 먹을 때 뒷다리로 서며, 멸종된 거대한 나무늘보와 칼리코테리아도 그러했다. 점박이 스컹크는 위협을 받을 때 앞발로 걷기를 하며, 공격자를 마주보고 앞다리로 일어서서 공격자에게 공격적인 오일을 뿌릴 수 있는 항문선을 드러낸다.
비포유류 (및 비조류)의 제한적 이족보행은 다음과 같다.
6. 인간 직립보행의 진화
인간의 직립보행은 어떻게, 왜 진화했는지에 대한 최소 12가지 이상의 서로 다른 가설이 존재하며, 언제부터 시작되었는지에 대한 논쟁도 있다. 직립보행은 뇌가 커지거나 석기 도구가 개발되기 훨씬 전에 진화했다.[39] 직립보행에 특화된 모습은 420만 년 전에서 390만 년 전의 ''오스트랄로피테쿠스'' 화석에서 발견되었으며, 최근 연구에서는 의무적으로 직립보행을 했던 호미닌 종이 700만 년 전부터 존재했을 가능성을 제시했다.[28][40]
직립보행의 진화는 대후두공의 위치 변화를 포함하여 척추에 중요한 변화를 가져왔다. 대후두공은 척수가 두개골을 떠나는 곳이다.[41] 현대 인류에게서 나타나는 성적 이형성(남성과 여성의 신체적 차이)은 요추에서 ''오스트랄로피테쿠스 아프리카누스''와 같은 초기 영장류에게서도 관찰되었다. 이러한 요추의 성적 이형성은 임신 중 요추에 가해지는 부하를 더 잘 견디기 위해 여성이 진화적으로 적응한 결과로 여겨지며, 직립보행을 하지 않는 영장류는 이러한 적응을 할 필요가 없었을 것이다.[42][43]
직립보행에 적응하면서 어깨의 안정성이 감소했고, 이는 어깨와 다른 팔다리가 서로 더 독립적으로 움직일 수 있게 하여 특정한 매달리기 행동에 적응할 수 있게 했다. 보행 방식의 변화는 어깨 이동성에 대한 필요성을 증가시켰을 것이며, 이는 직립보행의 진화를 이끌었을 것이다.[44]
직립보행의 진화에 대한 여러 가설들은 상호 배타적이지 않으며, 여러 가지 선택적인 힘이 함께 작용하여 인간의 직립보행을 이끌었을 가능성이 있다. 직립보행 적응과 이후에 발생한 달리기 적응을 구별하는 것이 중요하다.
6. 1. 다양한 가설
네이피어(Napier, 1963)는 이족보행의 진화가 단일 요인으로 설명되기 어렵다고 보았다. 그는 물건 운반, 시야 개선, 손의 자유로운 사용 등이 복합적으로 작용했을 것이라고 주장했다.[50] 시그먼(Sigmon, 1971)은 침팬지가 다양한 상황에서 이족보행을 한다는 점을 들어, 인간 이족보행의 기원을 단일 요인으로 설명해야 한다고 주장했다.[51] 데이(Day, 1986)는 식량 획득, 포식자 회피, 생식 성공이라는 세 가지 주요 요인이 이족보행 진화에 영향을 미쳤다고 강조했다.[52]코(Ko, 2015)는 이족보행과 관련하여 다음과 같은 두 가지 주요 질문을 제시했다.[53]
# 최초의 호미닌은 왜 부분적으로 이족보행을 했는가?
# 호미닌은 왜 시간이 지남에 따라 더 이족보행을 하게 되었는가?
그는 이러한 질문에 사바나 기반, 자세 먹기, 자원 공급과 같은 주요 이론을 조합하여 답할 수 있다고 주장했다.
6. 1. 1. 사바나 기반 이론
호미닌은 나무에서 내려와 두 발로 직립보행을 하면서 사바나 생활에 적응했다. 초기 호미니드가 나무를 떠난 후 열린 사바나에서 두 발 보행으로 적응해야 했다. 제안된 메커니즘 중 하나는 너클 보행 가설인데, 이는 인류의 조상이 사바나에서 네 발 보행을 사용했다는 것을 의미한다. 이는 ''오스트랄로피테쿠스 아나멘시스''와 ''오스트랄로피테쿠스 아파렌시스''의 앞다리에서 발견되는 형태학적 특성에 의해 입증된다.[54]직립 자세의 진화는 사바나에서 포식자를 감시하기 위해 키 큰 풀 위를 보거나, 육상에서 사냥하고 먹잇감에게 몰래 접근할 수 있도록 하므로 매우 유용했을 것이다.[55] P. E. 휠러는 사바나에서 이족보행의 가능한 장점은 햇빛에 노출되는 신체 표면적을 줄여 체온 조절을 돕는 것이라고 제안했다.[56] 엘리자베스 브르바의 전환-펄스 가설은 지구 온난화 및 냉각으로 인한 산림 지역의 축소를 설명하여, 동물이 열린 초원으로 내몰리고 호미닌이 이족보행을 습득해야 하는 필요성을 야기함으로써 사바나 기반 이론을 뒷받침한다.[57]
화석 증거는 초기 이족보행 호미닌이 보행을 할 때에도 여전히 나무를 오르는 데 적응했다는 것을 보여준다.[58] 이족보행은 나무에서 진화하여 나중에 흔적 기관으로 사바나에 적용되었을 가능성이 있다. 인간과 오랑우탄은 얇은 나뭇가지를 오를 때 엉덩이와 무릎의 신전이 증가하는 이족보행 반응 적응에 모두 고유하며, 이는 수목 서식지의 먹이 획득 범위를 증가시키고 수목 환경에서 진화하는 이족보행의 수렴 진화로 볼 수 있다.[59]
마른 초원 환경에서 발견된 호미닌 화석은 인류학자들이 호미닌이 그러한 환경에서만 살고, 자고, 직립보행하고, 죽었다고 믿게 만들었다. 왜냐하면 숲 지역에서는 호미닌 화석이 발견되지 않았기 때문이다. 그러나 화석화는 드문 현상이며, 숲에서 호미닌 화석이 발견되지 않았다는 사실은 호미닌이 그곳에서 죽지 않았다는 결론으로 이어지지 않는다. 사바나 기반 이론의 편리함 때문에 이 점은 100년 이상 간과되었다.[57]
발견된 화석 중 일부는 여전히 수목 생활에 적응했음을 보여주었다. 예를 들어, 루시는 나무 가지를 잡을 수 있는 굽은 손가락을 가지고 있었지만, 이족보행을 했다. ''오스트랄로피테쿠스 아프리카누스''의 거의 완전한 표본인 "리틀 풋"은 벌어진 큰 발가락과 직립보행을 할 수 있는 발목 힘을 가지고 있다. "리틀 풋"은 유인원처럼 발을 사용하여 물건을 잡을 수 있었고 이족보행을 했다. 이러한 화석이 발견된 지역의 토양에서 발견된 고대 꽃가루는 이 지역이 예전에는 훨씬 더 습하고 빽빽한 식물로 덮여 있었고, 최근에야 지금의 건조한 사막이 되었다는 것을 시사한다.[57]
6. 1. 2. 이동 효율성 가설
사바나와 흩어진 숲이 혼합된 환경에서 원인류는 나무 사이를 육상으로 이동하는 경우가 많아졌고, 이족 보행은 사족 보행보다 장거리 이동에 더 효율적이었다.[60][61] 침팬지의 산소 소비량을 통해 신진대사율을 측정한 실험에서는 사족 보행과 이족 보행의 에너지 비용이 매우 유사한 것으로 나타났다. 이는 초기 유인원 조상에서 이족 보행으로의 전환이 어렵거나 에너지 소비가 많지 않았음을 의미한다.[62] 이처럼 증가된 이동 효율성은 널리 분산된 자원을 찾아 식량을 채집하는 데 유리했기 때문에 이족 보행이 선택되었을 가능성이 높다.6. 1. 3. 자세 먹이 섭취 가설
인디애나 대학교의 케빈 헌트(Kevin Hunt)는 침팬지가 음식을 먹을 때만 두 발로 걷는다는 자세 먹이 섭취 가설을 주장하였다.[63] 침팬지는 땅에서는 작은 나무에 매달린 과일을 따기 위해 손을 뻗었고, 나무에서는 머리 위 가지를 잡기 위해 두 발 보행을 사용했다. 헌트는 이러한 움직임이 음식을 얻는 데 편리했기 때문에 규칙적인 습관으로 진화했을 수 있다고 보았다. 또한, 이러한 움직임이 침팬지의 팔 걸기와 함께 공진화했는데, 이는 음식을 수확하는 데 매우 효과적이었기 때문이다. 화석 해부학 분석에 따르면 ''오스트랄로피테쿠스 아파렌시스''는 침팬지와 매우 유사한 손과 어깨 특징을 가지고 있어 팔을 걸었음을 시사한다. ''오스트랄로피테쿠스''의 엉덩이와 뒷다리는 이족보행을 나타내지만, 인간에 비해 비효율적인 이동 운동을 보였다. 헌트는 두 발 보행이 걷는 자세보다는 지상에서 음식을 섭취하는 자세로 더 많이 진화했다고 주장한다.[63]버밍엄 대학교의 수자나 소프(Susannah Thorpe)는 오랑우탄이 얇은 가지를 탐색하기 위해 지지하는 가지를 잡는 것을 연구했다. 오랑우탄은 75% 이상의 경우에서 얇은 가지를 탐색할 때 앞다리를 사용하여 자신을 안정시켰다. 소프는 A. 아파렌시스 등의 서식지였던 숲의 조각화가 쇠퇴하는 숲을 탐색하기 위한 두 발 보행 증가에 기여했을 수 있다고 보았다. 또한, A. 아파렌시스의 해부학에서 관찰된 발목 관절의 유연성과 길고 유연한 앞다리의 특징은 나무에서 똑바로 탐색하는 것에서 두 발 보행이 시작되었다면 설명이 가능하다고 하였다.[64][65][66][67][68][69]
6. 1. 4. 자원 공급 모델
C. 오웬 러브조이는 이족보행의 진화가 일부일처제와 관련이 있다고 보았다. 유인원에게 전형적인 긴 출생 간격과 낮은 생식률을 고려할 때, 초기 인류는 자녀 양육에 더 많은 부모의 노력을 기울일 수 있게 하는 짝짓기를 했다. 러브조이는 남성이 식량을 보살피는 것이 자녀의 생존율을 향상시키고 부부의 생식률을 증가시킬 것이라고 제안한다. 따라서 남성은 배우자와 자녀를 떠나 음식을 찾아 두 팔로 음식을 운반하며 다리로 걸어왔다.[70] 이 모델은 초기 인류인 ''사헬란트로푸스 차덴시스''[71]와 ''아르디피테쿠스 라미두스''[72]에서 남성 송곳니의 감소("여성화")로 뒷받침되며, 이는 ''아르디피테쿠스''[73]와 ''오스트랄로피테쿠스''[74][75][76]에서 낮은 신체 크기 이형성과 함께 초기 인류에서 남성 간의 적대적 행동 감소를 시사한다.[77] 또한, 이 모델은 은폐된 배란(영구적으로 확대된 유방, 성적 부어오름의 부재)과 낮은 정자 경쟁(중간 크기의 고환, 낮은 정자 중간 부분 부피)과 관련된 많은 현대 인간의 특성으로 뒷받침되며, 이는 일부다처 생식 시스템에 대한 최근 적응에 반대한다.[77]그러나 이 모델은 논쟁의 대상이 되었는데, 다른 사람들은 초기 이족보행 인류가 대신 일부다처제였다고 주장했기 때문이다. 대부분의 일부일처 영장류에서 수컷과 암컷은 거의 같은 크기이다. 즉, 성적 이형성이 최소화되며, 다른 연구에서는 ''오스트랄로피테쿠스 아파렌시스'' 수컷이 암컷의 거의 두 배에 달하는 체중을 가졌다고 제안했다. 그러나 러브조이의 모델은 식량을 보살피는 수컷이 (암컷이 스스로 얻을 수 있는 자원을 놓고 경쟁하는 것을 피하기 위해) 더 넓은 범위를 커버해야 하므로 포식 위험을 제한하기 위해 수컷 신체 크기가 증가하는 방향으로 선택될 것이라고 가정한다.[78] 또한, 종이 더 이족보행을 함에 따라 특화된 발은 유아가 어머니에게 편리하게 매달리는 것을 방해하여 어머니의 자유를 방해하고[79], 따라서 그녀와 자녀를 다른 사람이 수집한 자원에 더 의존하게 만들 것이다. 긴팔원숭이와 같은 현대 일부일처 영장류는 영토성이 있는 경향이 있지만, 화석 증거는 ''오스트랄로피테쿠스 아파렌시스''가 대규모 집단으로 살았음을 나타낸다. 그러나 긴팔원숭이와 인류 모두 송곳니 성적 이형성이 감소했지만, 암컷 긴팔원숭이는 자신의 송곳니를 확대('남성화')하여 자신의 영토 방어에 적극적으로 참여할 수 있다. 그 대신, 남성 인류 송곳니의 감소는 집단 생활을 하는 짝짓기를 한 영장류에서 남성 간의 공격성 감소와 일치한다.
6. 1. 5. 초기 호미니나이 모델
''Ardipithecus ramidus''영어(아르디피테쿠스 라미두스)(440만 년 전)에 대한 연구는 이족 보행을 시사한다.[80] 따라서 이족 보행은 호미닌에서 매우 일찍 진화했을 가능성이 있으며, 침팬지와 고릴라가 더 전문화되면서 감소했을 수 있다. 아르디피테쿠스 라미두스의 발 구조에 대한 연구는 이 종이 아프리카 유인원 조상과 밀접한 관련이 있음을 보여준다. 이는 완전히 이족 보행을 하는 호미닌과 사지 보행 유인원 사이의 진정한 연결 고리에 가까운 종을 제공할 수 있다.[80]리처드 도킨스는 그의 저서 "조상의 이야기"에서 침팬지와 보노보는 오스트랄로피테쿠스의 '가냘픈' 종에서, 고릴라는 파란트로푸스에서 유래되었다고 주장한다. 이 유인원들은 한때 이족 보행을 했을 수 있지만, 후에 오스트랄로피테쿠스에서 진화하여 호미닌이 된 종들에 의해 나무 위 서식지로 다시 돌아가면서 이 능력을 잃었을 수 있다. 아르디피테쿠스 라미두스와 같은 초기 호미닌은 나무 위에서 하는 이족 보행 형태를 가지고 있었을 수 있으며, 이는 나중에 침팬지와 고릴라에서는 독립적으로 주먹 보행으로[81], 현생 인류에서는 효율적인 걷기와 달리기로 진화했을 수 있다. 또한 네안데르탈인 멸종의 한 가지 원인이 덜 효율적인 달리기 때문이라는 주장도 있다.
6. 1. 6. 경고 전시 (경계색) 모델
멜버른 대학교의 조셉 조르다니아는 2011년에 이족 보행이 초기 호미니드의 방어 전략 중 핵심 요소였다고 제안했다. 이는 경고 전시 모델에 기반하는데, 잠재적인 포식자와 경쟁자를 과장된 시각 및 청각 신호로 위협하는 것이다.[82] 호미니드는 항상 가능한 한 눈에 띄고 시끄럽게 보이려 했으며, 이를 위해 다음과 같은 여러 형태적, 행동적 발전이 이루어졌다.- 직립 이족 보행
- 긴 다리
- 머리 윗부분의 길고 촘촘하게 꼬인 머리카락
- 보디 페인팅
- 위협적인 동기화된 신체 움직임
- 큰 목소리
- 외부 물체에 대한 리듬 있는 노래/발 구르기/드럼 연주[82]
느린 이동과 강한 체취(둘 다 호미니드와 인간의 특징)는 경고 전시 종들이 잠재적 포식자에게 자신들의 비수익성을 알리는 데 사용하는 특징이다.[82]
6. 1. 7. 기타 행동 모델
이족 보행의 진화에 대한 핵심 동력으로서 특정한 행동 변화를 촉진하는 다양한 아이디어가 존재한다. 예를 들어, 웨스트코트(1967)와 이후 자블론스키 & 채플린(1993)은 이족 보행 위협 과시가 일부 유인원 집단이 이족 보행 자세를 더 자주 채택하게 된 전환적 행동이었을 수 있다고 제안한다. 다른 연구자들(예: 다트 1925)은 포식자에 대한 더 큰 경계의 필요성이 초기 동기를 제공했을 수 있다는 아이디어를 제시했다. 도킨스(예: 2004)는 그것이 유행처럼 시작되어 성적 선택을 통해 확대되었을 수 있다고 주장했다. 심지어 남성의 남근 과시가 초기 유인이었을 뿐만 아니라, 여성의 직립 자세에서 성적 신호가 증가했을 수도 있다고 제안되기도 했다(예: 태너 1981:165).[55]6. 1. 8. 체온 조절 모델
피터 휠러(Peter Wheeler) 박사는 이족보행이 지면 위로 신체 표면적을 높여 열 획득을 줄이고 열 발산을 돕는다고 제안한다.[83][84][85] 유인원이 지면 위로 올라갈수록 더 유리한 풍속과 온도를 접하게 되는데, 더운 계절에는 더 강한 바람이 불어 열 손실이 커지면서 유기체가 더 쾌적해진다. 또한, 휠러는 수직 자세가 직접적인 햇빛 노출을 최소화하는 반면, 네 발로 걷는 자세는 신체의 더 많은 부분을 직접 노출시킨다고 설명한다. 아르디피테쿠스에 대한 분석 및 해석에 따르면, 이 가설은 초기 단계 유인원 이족보행의 숲과 삼림 환경 적응이 자연 선택의 압력에 의한 이족보행의 추가적인 개선에 앞선다는 점을 고려하도록 수정될 필요가 있다. 이는 더운 환경이 이족보행의 초기 자극이었다는 가설보다는, 더운 환경의 생태적 지위를 더 효율적으로 활용할 수 있게 해 주었다. 더 덥고 개방된 서식지에서 이족보행이 갖는 장점에서 비롯된 피드백 메커니즘은 숲에서의 적응을 영구적인 상태로 굳히게 만들었을 것이다.[86]6. 1. 9. 운반 모델
찰스 다윈은 "인간은 의지에 순응하도록 훌륭하게 적응된 손의 사용 없이는 현재 세계에서 지배적인 위치에 도달할 수 없었을 것이다"라고 썼다.[87] 이족 보행 기원에 관한 많은 모델들은 다윈(1871:52)의 이러한 사고방식에 기반을 두고 있다. 고든 휴스(Gordon Hewes, 1961)는 "상당한 거리"에 걸쳐 고기를 운반하는 것이 핵심 요소라고 제안했다. 아이작(Isaac, 1978)과 싱클레어 등(Sinclair et al., 1986)은 이 아이디어를 수정하여 제시했으며, 러브조이(Lovejoy, 1981)는 "식량 공급 모델"을 제시했다. 낸시 태너(Nancy Tanner, 1981)와 같은 다른 학자들은 유아 운반이 핵심이라고 제안했으며, 또 다른 학자들은 석기 도구와 무기가 변화를 이끌었다고 주장했다.[87] 그러나 이러한 석기 도구 이론은 설득력이 부족한데, 고대 인류가 사냥을 했다는 것은 알려져 있지만 도구의 발견은 이족 보행의 기원 이후 수천 년이 지나서야 발견되었기 때문에 진화의 원동력이 될 수 없기 때문이다.6. 1. 10. 도보 가설
사지와 특히 유인원을 포함한 대형 영장류가 마른 땅에서는 주로 네 발로 이동하다가 허리 깊이의 물에서는 이족 보행으로 전환하는 현상을 관찰한 결과, 인간 이족 보행의 기원이 물가 환경의 영향을 받았을 수 있다는 가설이 제시되었다. 이 가설은 "도보 가설"이라고 불린다.[88]도보 가설은 원래 옥스퍼드 대학교의 해양 생물학자 앨리스터 하디가 제안했다. 그는 "인간이 처음에는 물 속에서 똑바로 서는 법을 배웠고, 균형 감각이 향상되면서 물 밖으로 나왔을 때 해변에서 서는 데 더 적합하게 되었으며, 실제로 달리는 데도 더 적합하게 되었다."라고 말했다.[89]
이 가설은 엘레인 모건에 의해 수생 유인원 가설의 일부로 확장되었는데, 이족 보행 외에도 자발적인 호흡 조절, 털 없음, 피하 지방 등 다른 영장류에게는 없는 인간의 특징을 설명하려 했다.[90] 그러나 수생 유인원 가설은 인류학 학계에서 받아들여지지 않았다.[91]
카르스텐 니미츠는 도보 가설을 변형한 "양서류 일반 이론"(Amphibische Generalistentheorie|양서류 일반 이론de)을 제시했다.[92]
다른 이론들은 도보와 수생 식량 자원의 활용이 인간 뇌 진화에 필수적인 영양소를 제공[93]하거나 중요한 대체 식량을 제공[94]함으로써, 인간 조상이 완전한 이족 보행을 지원하는 적응을 촉진하는 진화적 압력을 가했을 수 있다고 제안한다. 또한 일관된 수생 식량 자원이 초기 호미니드의 의존성을 발전시키고 바다와 강을 따라 분산을 촉진했을 것으로 생각된다.[95]
7. 결과
초기 호미닌은 뇌 크기가 증가하기 전에 이족 보행을 먼저 발달시켰다.[96] 이족 보행을 위해 좁은 골반이 선호되었고, 좁아진 산도를 통과하는 머리가 커지면서 고통스럽고 어려운 분만을 초래했다. 이 현상은 산과적 딜레마로 알려져 있다.
인간이 아닌 영장류는 습관적으로 스스로 새끼를 낳지만, 현대 인간은 그렇지 않다. 고립된 출산은 드문 일이며, 출산 방법은 문화마다 다를 수 있지만, 다양한 문화권에서 적극적으로 피한다. 이는 엉덩이 뼈가 좁아지고 골반 각도가 변하면서 머리 크기와 산도의 비율에 불일치가 발생했기 때문이다. 그 결과 호미닌은 일반적으로 분만에 어려움을 겪으며, 혼자서 분만하는 것은 더욱 어렵다.[97]
8. 생리
이족보행은 여러 방식으로 발생하며 많은 기계적 및 신경학적 적응을 필요로 한다. 이러한 적응에는 직립 자세 유지, 어깨 안정성 감소, 걷기 및 달리기 방식의 변화, 근육 발달, 호흡 조절 등이 있다.
인간의 보행은 다른 동물, 특히 침팬지와 비교해 이동 시 무게 중심이 앞쪽이 아닌 중심부에 오는 안정된 직립보행을 수행한다는 점에서 구별된다. 침팬지와 고릴라처럼 이족 보행을 할 수 있는 유인원과는 달리, 인간은 굽힌 엉덩이-굽힌 무릎(BHBK) 보행을 사용하지 않고도 이족 보행을 할 수 있다. 이는 엉덩이와 무릎 관절을 모두 사용해야 하는 유인원과 달리, 인간은 척추 만곡을 가지고 있기 때문이다.[99]
8. 1. 생체 역학
제한적이고 배타적인 이족 보행은 종에게 몇 가지 이점을 제공한다. 이족 보행은 머리를 들어 올려 더 넓은 시야를 확보하여 멀리 있는 위험이나 자원을 더 잘 감지할 수 있게 하고, 물속을 걸어 다니는 동물들이 더 깊은 물에 접근할 수 있게 하며, 동물들이 입으로 더 높은 곳에 있는 먹이에 닿을 수 있게 한다. 직립 상태에서, 움직임에 사용되지 않는 사지는 조작(영장류와 설치류에서), 비행(조류에서), 굴착(자이언트천산갑에서), 전투(곰, 거대한 유인원 및 큰 왕도마뱀) 또는 위장 등 다른 용도로 자유롭게 사용할 수 있다.최대 이족 보행 속도는 유연한 척추를 가진 사족 보행의 최대 속도보다 느린 것으로 보인다. 타조와 붉은캥거루는 모두 70km/h의 속도에 도달할 수 있는 반면, 치타는 100km/h를 초과할 수 있다.[6][7] 이족 보행이 처음에는 느리지만, 장거리에서는 지구력 달리기 가설에 따르면 인간이 다른 대부분의 동물보다 더 오래 달릴 수 있게 해준다.[8] 캥거루쥐의 이족 보행은 이동 능력을 향상시키는 것으로 가설이 제기되었으며, 이는 포식자로부터 도망치는 데 도움이 될 수 있다.[9][10]
8. 1. 1. 서기
에너지 효율적인 이족 보행 방식은 끊임없는 균형 조절을 수반하며, 물론 이는 과도한 보정을 피해야 한다. 똑바로 서 있는 단순한 자세와 관련된 어려움은 제어 시스템의 효율이 최소한으로 감소하더라도 노년층에서 낙상의 위험이 크게 증가한다는 점을 통해 강조된다.8. 1. 2. 어깨 안정성
이족 보행의 진화와 함께 어깨 안정성은 감소하고, 어깨 가동성은 증가했을 것이다. 이는 안정적인 어깨의 필요성이 수목 환경에서만 존재하기 때문이다. 어깨의 가동성은 인간의 이족 보행에서 나타나는 매달리기 이동 행동을 지원했을 것이다. 앞다리가 체중 부하의 요구 사항에서 해방되면서 어깨는 이족 보행 진화의 증거가 되었다.[98]8. 1. 3. 걷기
인간의 보행은 다른 동물, 특히 침팬지와 비교해 이동 시 무게 중심이 앞쪽이 아닌 중심부에 오는 안정된 직립보행을 수행한다는 점에서 구별된다. 침팬지(''Pan'')와 고릴라처럼 이족 보행을 할 수 있는 유인원과는 달리, 인간은 굽힌 엉덩이-굽힌 무릎(BHBK) 보행을 사용하지 않고도 이족 보행을 할 수 있다. 이는 엉덩이와 무릎 관절을 모두 사용해야 하는 유인원과 달리, 인간은 척추 만곡을 가지고 있기 때문이다.[99]보행은 각 걸음마다 뻣뻣한 다리 위로 중심이 솟아오르는 "역진자" 운동으로 특징지어진다.[100] 힘판을 사용하여 전신 운동 에너지 및 위치 에너지를 정량화할 수 있으며, 보행은 두 에너지 간의 교환을 나타내는 위상차가 있는 관계를 나타낸다.[100] 이 모델은 다리 수에 관계없이 모든 보행하는 유기체에 적용되므로, 이족 보행은 전신 운동 역학 측면에서 다르지 않다.[101]
인간의 보행은 다음과 같은 여러 개의 개별적인 과정으로 구성된다:[100]
- 뻣뻣한 자세의 다리 위로 도약
- 흔들리는 다리의 수동적인 탄도 운동
- 발가락이 떨어지기 전 발목에서 짧은 '밀어내기'로 스윙 다리를 추진
- 보폭을 늘리기 위해 척추 축을 중심으로 엉덩이 회전
- 자세를 취하는 동안 균형을 개선하기 위해 수평축을 중심으로 엉덩이 회전
조류는 몸통과 대퇴부가 거의 수평이며, 무릎을 굽힌 자세로 무릎 관절보다 먼 부위를 크게 움직여 보행한다.[106] 이에 비해 인간의 보행은 발 위에 항상 무게 중심이 있는 것이 아니라, 고관절보다 먼 부위를 크게 움직여 동적으로 안정된 보행을 한다.[106]
8. 1. 4. 달리기
초기 인류는 이족 보행, 특히 달리기에 더 잘 적응하기 위해 몸통 이하의 변화를 겪었다. 이러한 변화 중 하나는 앞다리에 비해 뒷다리가 더 길어진 것이다. 뒷다리가 길어지면 직접적인 햇빛에 노출되는 총 표면적을 줄여 체온 조절을 돕는 동시에 시원한 바람이 통할 공간을 더 많이 확보할 수 있다. 또한, 다리가 길면 근육의 전체적인 부담이 줄어들어 에너지 효율이 더 높아진다. 에너지 효율이 향상되면 특히 장거리를 달릴 때 지구력이 향상된다.[102]
달리기는 용수철-질량 운동의 특징을 갖는다.[100] 운동 에너지와 위치 에너지가 동위상이며, 에너지는 발이 지면에 닿는 동안 발과 다리의 족저 아치와 아킬레스건에 의해 각각 용수철처럼 저장되고 방출된다.[100][102] 다시 말해, 전신 운동 역학은 다리가 더 많은 동물과 유사하다.[101]
8. 2. 근육
이족 보행은 특히 허벅지에 강력한 다리 근육을 필요로 한다. 가축화된 가금류의 잘 발달된 다리에 비해 작고 뼈만 남은 날개를 비교해 볼 수 있다. 마찬가지로 인간의 경우 허벅지의 대퇴사두근과 햄스트링 근육은 이족 보행 활동에 매우 중요하며, 각각의 근육 크기가 잘 발달된 팔의 이두근보다 훨씬 크다. 다리 근육 외에도 인간의 대둔근 크기가 증가한 것은 중요한 적응으로, 몸통을 지지하고 안정성을 제공하며 달릴 때 관절에 가해지는 스트레스의 양을 줄여준다.[102]8. 3. 호흡
사족보행은 이족보행하는 인간보다 움직일 때 호흡이 더 제한적이다.[103] 사족보행 종은 일반적으로 속보와 갤럽에서 호흡당 걸음 수의 비율이 1:1로 고정되어 보행 및 호흡 주기가 동기화된다. 반면 인간 주자는 달리는 동안 4:1, 3:1, 2:1, 1:1, 5:2, 3:2 등 다양한 위상 고정 패턴을 사용하지만, 2:1 결합 비율이 선호되는 것으로 보인다. 이족 보행의 진화는 인간의 호흡에 대한 기계적 제약을 줄여 호흡 패턴의 유연성을 높였지만, 지속적인 달리기 동안 호흡과 신체 움직임의 동기화에 대한 필요성은 없어지지 않은 것으로 보인다.[104]이족 보행을 통한 호흡은 이족 보행자에게 더 나은 호흡 조절을 가능하게 하며, 이는 뇌 성장과 관련될 수 있다. 현대 인간의 뇌는 호흡과 식사를 통해 얻는 에너지의 약 20%를 사용하는 반면, 침팬지와 같은 종은 동일한 양의 움직임에 대해 인간보다 두 배나 많은 에너지를 사용한다. 이러한 에너지 차이는 뇌 성장으로 이어지며, 이는 언어적 의사 소통의 발달로도 이어진다. 호흡 조절은 호흡과 관련된 근육을 조작하여 소리를 생성하는 것을 가능하게 하기 때문이다. 즉, 더 효율적인 호흡으로 이어지는 이족 보행의 시작은 언어의 기원과 관련될 수 있다.[103]
9. 이족보행 로봇
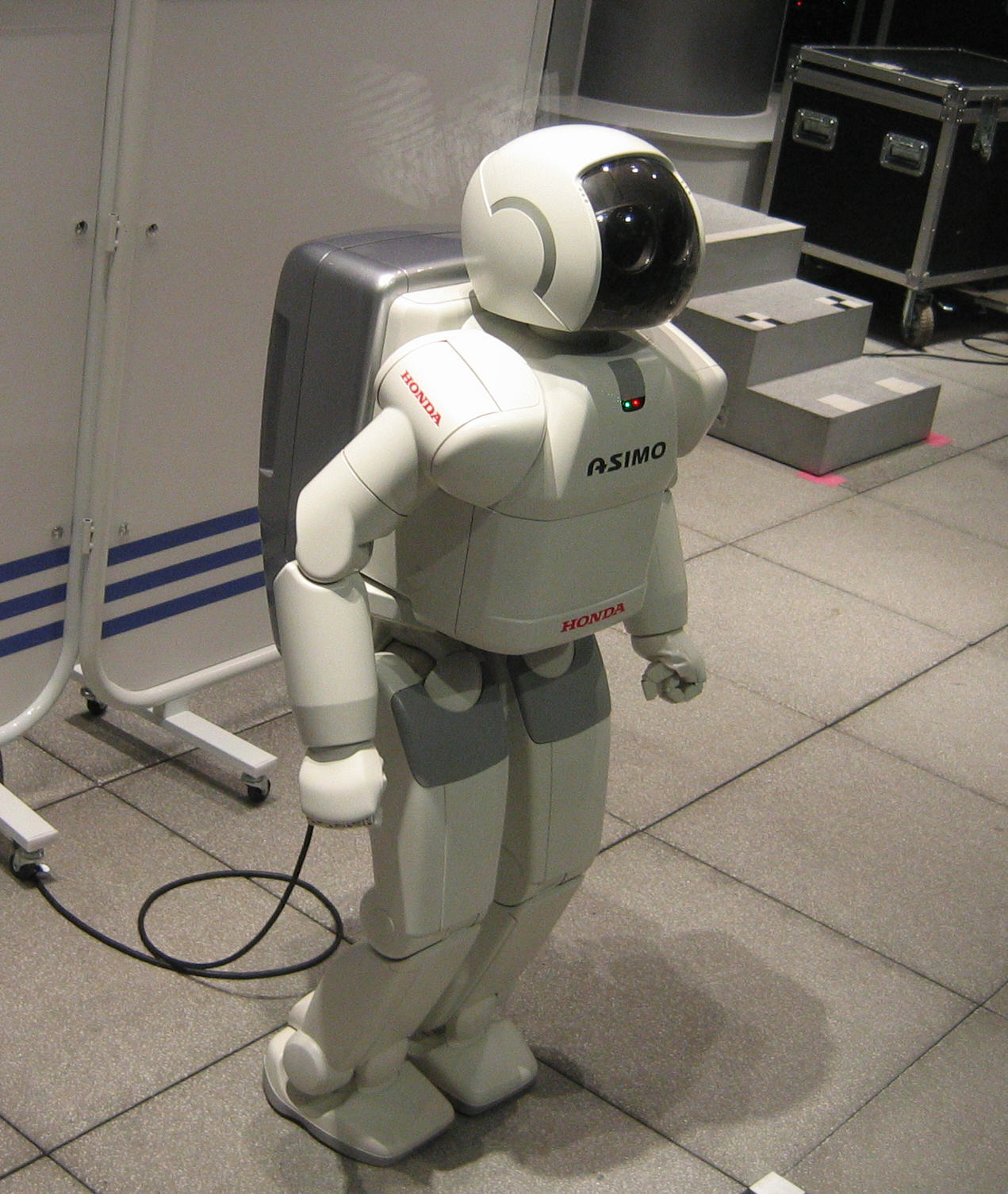
20세기 거의 대부분, 이족 보행 로봇은 만들기가 매우 어려웠고, 로봇 이동에는 바퀴, 궤도, 또는 여러 다리만 사용되었다. 최근에는 저렴하고 소형화된 컴퓨터 기술 덕분에 두 다리를 가진 로봇이 더욱 현실화되었다. 주목할 만한 이족 보행 로봇으로는 ASIMO, HUBO, MABEL, QRIO 등이 있다.[105]
최근에는 완전히 수동적이고 동력이 없는 이족 보행 로봇 제작이 성공하면서,[105] 이러한 기기를 연구하는 사람들은 인간과 동물의 이동 원리를 활용하기 시작했는데, 이는 주로 전력 소비를 최소화하기 위해 수동적인 메커니즘에 의존하는 방식이다.
참조
[1]
간행물
A Bird Like No Other
http://www.nwf.org/N[...]
National Wildlife Federation
2006-08-01
[2]
백과사전
Birds I Tinamous and Ratites to Hoatzins
Gale Group
[3]
서적
The Secret World of Kangaroos
https://books.google[...]
Raintree Steck-Vaughn
[4]
논문
Energetics and mechanics of terrestrial locomotion. III. Energy changes of the centre of mass as a function of speed and body size in birds and mammals
[5]
논문
Body and tail-assisted pitch control facilitates bipedal locomotion in Australian agamid lizards
2018
[6]
논문
The relation between maximal running speed and body mass in terrestrial mammals
http://www.biology.u[...]
[7]
논문
Timed running speed of a cheetah (''Acinonyx jubatus'')
[8]
논문
Endurance running and the evolution of Homo
http://doc.rero.ch/r[...]
2004-11-18
[9]
논문
Locomotor performance of bipedal and quadrupedal heteromyid rodents
[10]
논문
Maximal running speeds of bipedal and quadrupedal rodents
http://www.biology.u[...]
[11]
웹사이트
Human Hand-Walkers: Five Siblings Who Never Stood Up
http://www.lse.ac.uk[...]
Centre for Philosophy of Natural and Social Science, London School of Economics
[12]
뉴스
Upright lizard leaves dinosaur standing
http://archives.cnn.[...]
2000-11-03
[13]
논문
Early Permian Bipedal Reptile
[14]
논문
The evolution of locomotion in archosaurs
http://doc.rero.ch/r[...]
[15]
웹사이트
Global Warming Led To Atmospheric Hydrogen Sulfide And Permian Extinction
https://www.scienced[...]
2005-03-01
[16]
웹사이트
The Day The Earth Nearly Died - programme summary
http://www.bbc.co.uk[...]
BBC
[17]
서적
The First Dinosaurs
Orbis Publishing Ltd
[18]
논문
Primitive dinosaur skeleton from Argentina and the early evolution of Dinosauria
1993-01
[19]
잡지
Dino-Era Fossil Reveals Two-Footed Croc Relative
http://news.national[...]
2006-01-26
[20]
논문
The Phylogenetic Position of the Musky Rat-Kangaroo and the Evolution of Bipedal Hopping in Kangaroos (Macropodidae: Diprotodontia)
1988-09
[21]
논문
A new Pleistocene tree-kangaroo (Diprotodontia: Macropodidae) from the Nullarbor Plain of south-central Australia
http://blogs.scienti[...]
[22]
뉴스
Two-legged fox is nature conquering all, says wildlife expert
https://www.bbc.com/[...]
2023-01-05
[23]
논문
Locomotor versatility in the white-handed gibbon (Hylobates lar): A spatiotemporal analysis of the bipedal, tripedal, and quadrupedal gaits
https://lirias.kuleu[...]
[24]
논문
Bipedal behavior of olive baboons (Papio anubis) and its relevance to an understanding of the evolution of human bipedalism
http://www3.intersci[...]
[25]
웹사이트
Coquerel's Sifaka
http://lemur.duke.ed[...]
Duke University Lemur Center
[26]
웹사이트
Primate Factsheets: Gelada baboon (Theropithecus gelada) Taxonomy, Morphology, & Ecology
http://pin.primate.w[...]
[27]
서적
Primate morphophysiology, locomotor analyses, and human bipedalism
University of Tokyo Press
[28]
논문
Postcranial evidence of late Miocene hominin bipedalism in Chad
https://hal.archives[...]
2022-08-24
[29]
웹사이트
What Does It Mean To Be Human? - Walking Upright
http://humanorigins.[...]
2016-08-14
[30]
논문
Bipedality in chimpanzee (Pan troglodytes) and bonobo (Pan paniscus): Testing hypotheses on the evolution of bipedalism
http://www3.intersci[...]
2002-05-09
[31]
논문
Chimpanzee bipedal locomotion in the Gombe National Park, East Africa
[32]
뉴스
Monkey apes humans by walking on two legs
https://www.nbcnews.[...]
2004-07-21
[33]
논문
Response to Comment on "Origin of Human Bipedalism As an Adaptation for Locomotion on Flexible Branches"
2007-11-16
[34]
웹사이트
Walking tall after all
http://www.liv.ac.uk[...]
University of Liverpool
[35]
웹사이트
Bipedal orangs, gait of a dinosaur, and new-look Ichthyostega: exciting times in functional anatomy part I
http://scienceblogs.[...]
2008-04-28
[36]
웹사이트
The Story behind the Picture - Monitor Lizards Combat
http://www.wildlifet[...]
Wildlife Times
2007-03-08
[37]
웹사이트
Bipedal animals, and their differences from humans
http://www.ingentaco[...]
Ingentaconnect.com
2004-05-01
[38]
논문
Underwater bipedal locomotion by octopuses in disguise
[39]
논문
Evolution of Human walking
[40]
서적
Evolution: The First Four Billion Years
The Belknap Press of Harvard University Press
[41]
웹사이트
Becoming Human: The Evolution of Walking Upright
http://www.smithsoni[...]
2012-08-06
[42]
뉴스
A pregnant woman's spine is her flexible friend
http://news.independ[...]
2007-12-13
[43]
뉴스
Why Pregnant Women Don't Tip Over
http://news.national[...]
2007-12-12
[44]
논문
Locomotor Coupling and the Origin of Hominin Bipedalism
[45]
논문
How did humans acquire erect bipedal walking?
https://www.jstage.j[...]
2019
[46]
논문
Origin of Human Bipedalism as an Adaptation for Locomotion on Flexible Branches
https://www.jstor.or[...]
2007
[47]
논문
The evolution of the upright posture and gait—a review and a new synthesis
2010
[48]
논문
Bipedal behavior and the emergence of erect posture in man
[49]
논문
Origins of Bipedalism
2015
[50]
서적
The evolution of bipedal walking in the hominids
Archives de Biologie (Liege)
[51]
논문
Bipedal behavior and the emergence of erect posture in man
[52]
서적
Bipedalism: Pressures, origins and modes. Major topics in human evolution
Cambridge University Press
[53]
논문
Origins of Bipedalism
2015
[54]
논문
Evidence that humans evolved from a knuckle-walking ancestor
[55]
서적
Primate diversity
W.W. Norton & Company, Inc
[56]
논문
The Evolution of Bipedality and Loss of Functional Body Hair in Hominoids
[57]
웹사이트
Sunset on the savanna
http://www.cabrillo.[...]
1996-07
[58]
논문
Australopithecus afarensis Scapular Ontogeny, Function, and the Role of Climbing in Human Evolution
2012
[59]
논문
Origin of human bipedalism as an adaptation for locomotion on flexible branches
[60]
논문
The evolution of bipedalism in hominids and reduced group size in chimpanzees: alternative responses to decreasing resource availability
[61]
서적
Java man: how two geologists' dramatic discoveries changed our understanding of the evolutionary path to modern humans
https://archive.org/[...]
Scribner
[62]
논문
Bipedal and quadrupedal locomotion in chimpanzees
[63]
웹사이트
The postural feeding hypothesis: an ecological model for the evolution of bipedalism
https://www.research[...]
1996-02
[64]
뉴스
Walk Like an Orangutan: Ape's stroll through the trees may shed light on evolution of human bipedalism
https://www.science.[...]
2007-05-31
[65]
뉴스
Orangutans Show First Walking May Have Been on Trees
https://www.scientif[...]
2007-05-31
[66]
뉴스
Upright orangutans point way to walking
https://www.nature.c[...]
2007-05-31
[67]
뉴스
Our upright walking started in the trees
https://www.newscien[...]
2007-05-31
[68]
웹사이트
Walking the walk: evolution of human bipedalism
https://www.cs.bham.[...]
2007
[69]
논문
Arboreal bipedalism in wild chimpanzees: Implications for the evolution of hominid posture and locomotion
https://onlinelibrar[...]
2006-02
[70]
서적
Images of the Past, 5th edition
https://archive.org/[...]
McGraw Hill
[71]
논문
A new hominid from the Upper Miocene of Chad, Central Africa
http://doc.rero.ch/r[...]
2002-07-11
[72]
논문
Paleobiological implications of the ''Ardipithecus ramidus'' dentition
http://doc.rero.ch/r[...]
2009-10-02
[73]
논문
Ardipithecus ramidus and the paleobiology of early hominids
2009
[74]
논문
An enlarged postcranial sample confirms Australopithecus afarensis dimorphism was similar to modern humans
2010
[75]
논문
Size and shape variation in the proximal femur of Australopithecus africanus
2009
[76]
논문
From Lucy to Kadanuumuu: Balanced analyses of ''Australopithecus'' afarensisassemblages confirm only moderate skeletal dimorphism
2015
[77]
논문
Reexamining human origins in light of Ardipithecus ramidus
http://doc.rero.ch/r[...]
2009
[78]
논문
The Origin of Man
[79]
서적
Understanding Emotion
[80]
논문
The African ape-like foot of Ardipithecus ramidus and its implications for the origin of bipedalism
2019-04-30
[81]
논문
Independent evolution of knuckle-walking in African apes shows that humans did not evolve from a knuckle-walking ancestor
2009-08
[82]
서적
Why do People Sing? Music in Human Evolution
Logos
[83]
논문
The evolution of bipedality and loss of functional body hair in hominids
[84]
논문
The influence of thermoregulatory selection pressures on hominid evolution.
[85]
논문
The influence of bipedalism on the energy and water budgets of early hominids
[86]
논문
Bipedality and hair loss in human evolution revisited: The impact of altitude and activity scheduling
[87]
서적
On Becoming Human
http://catalogue.nla[...]
Cambridge University Press
[88]
논문
Wading Hypotheses of the Origin of Human Bipedalism
[89]
논문
Was man more aquatic in the past?
http://www.riverapes[...]
[90]
서적
The Aquatic Ape Hypothesis
Souvenir Press
[91]
서적
The complete idiot's guide to human prehistory
https://archive.org/[...]
Alpha Books
[92]
서적
Das Geheimnis des Aufrechten Gangs ~ Unsere Evolution Verlief Anders
Beck
[93]
서적
Survival of the fattest: the key to human brain evolution
World Scientific Publishing Company
[94]
논문
Shallow-water habitats as sources of fallback foods for hominins
http://nrs.harvard.e[...]
2009-12
[95]
논문
Aquaboreal ancestors?
2002
[96]
서적
First Steps: How Upright Walking Made Us Human
HarperCollins
[97]
논문
The Evolution of Bipedalism and Assisted Birth
https://www.jstor.or[...]
1996
[98]
논문
Locomotor Coupling and the Origin of Hominin Bipedalism
[99]
논문
Spinopelvic pathways to bipedality: why no hominids ever relied on a bent-hip-bent-knee gait
2010
[100]
서적
Muscles, reflexes, and locomotion
https://books.google[...]
Princeton University Press
[101]
논문
A moving topic: control and dynamics of animal locomotion
[102]
논문
Ecological Energetics in Early Homo
https://www.jstor.or[...]
2012
[103]
서적
First Steps: How Upright Walking Made Us Human
Harper Collins
[104]
논문
Running and Breathing in Mammals
https://www.science.[...]
2022-08-28
[105]
웹사이트
Passive Dynamic Walking at Cornell
http://ruina.tam.cor[...]
2013-04-30
[106]
간행물
鳥とヒトの二足歩行
http://www.kasekiken[...]
化石研究会会誌38号
2019-11-20
[107]
논문
Early Permian Bipedal Reptile
https://www.science.[...]
2000-11-03
[108]
뉴스
걷고 뛰는 물고기 폐어, 직립 보행 ‘기원’ 가능성 제기
http://photos.mk.co.[...]
MK스포츠
2011-12-14
[109]
서적
생각의 역사1
들녘
2009
[110]
서적
The Human Revolution
Edinburgh University Press
1989
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com