끌개
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
끌개는 시간의 흐름에 따라 상태가 변화하는 동역학계에서, 특정 초기 상태들이 시간이 지남에 따라 접근하는 상태 공간의 부분 공간을 의미한다. 끌개는 고정점, 극한 주기 궤도, 극한 원환면, 이상한 끌개 등으로 분류되며, 시스템의 장기적인 거동을 결정하는 중요한 요소이다. 끌개는 시스템의 파라미터 변화에 따라 분기 현상을 겪으며, 카오스에 이르는 경로를 보일 수 있다. 시계열 데이터를 시간 지연 좌표계로 변환하여 끌개를 재구성하는 기법은 카오스적인 비선형 신호 분석에 활용되며, 예측, 이상 검출, 모니터링 등 다양한 분야에 적용된다.
더 읽어볼만한 페이지
- 극한 집합 - 안정성 이론
안정성 이론은 미분 방정식과 동역학적 시스템의 해의 점근적 성질과 궤적을 다루며, 평형점, 주기 궤도의 안정성, 섭동과 선형화, 랴푸노프 함수 등을 사용하여 시스템의 안정성을 분석한다. - 극한 집합 - 쥘리아 집합
쥘리아 집합은 복소수 c에 대해 점화식 zn+1 = zn2 + c를 반복할 때 발산하지 않는 복소수 z의 집합으로, 자기 유사성과 초기 조건에 민감한 특징을 가지며 파투 집합의 여집합으로 정의되어 복소 함수론과 복소 역학계 연구에서 중요한 역할을 한다. - 동역학계 - 가상일
가상일은 역학계에서 외력이 가상 변위에 대해 하는 일의 합으로, 정역학에서는 계의 정적 평형 조건으로 활용되며, 달랑베르 원리를 통해 동역학에도 적용되어 구조 해석 및 계산에 널리 쓰이는 물리량이다. - 동역학계 - 위상 공간 (물리학)
위상 공간은 역학계의 모든 가능한 상태를 모아 시스템의 상태 변수를 좌표로 나타낸 공간으로, 시간의 흐름에 따라 궤적을 그리며 시스템의 동역학적 거동을 분석하는 데 사용된다.
| 끌개 |
|---|
2. 정의
상태 공간이 위상 공간 인 계에서, 초기 상태 가 시간 가 지나면 에 있게 된다. 시간 는 계에 따라서 이거나 이다.
이 계의 '''끌개'''란 다음 세 조건들을 만족시키는, 상태 공간의 부분공간 이다.
# 만약 라면, 모든 에 대하여 이다.
# 의 어떤 열린 근방 에 대하여, 라면 충분히 큰 에 대하여 이다.
# 의 어떤 진부분집합도 위 두 조건을 만족시키지 않는다.
끌개 의 '''끌림 영역'''(basin of attraction영어) 는 충분한 시간이 지나면 로 빨려 들어가는 초기 상태들의 집합이며, 정의에 따라 의 근방이다.
:
시간을 로 나타내고, 를 시스템의 역학을 지정하는 함수라고 하자. 즉, 가 시스템의 초기 상태를 나타내는 차원 위상 공간의 한 점이라면, 이며, 양수 에 대해 는 시간 단위 후 이 상태의 진화 결과이다. 예를 들어, 시스템이 1차원 자유 입자의 진화를 설명하는 경우, 위상 공간은 좌표 를 갖는 평면 이며, 여기서 는 입자의 위치, 는 속도, 이고, 진화는 다음과 같이 주어진다.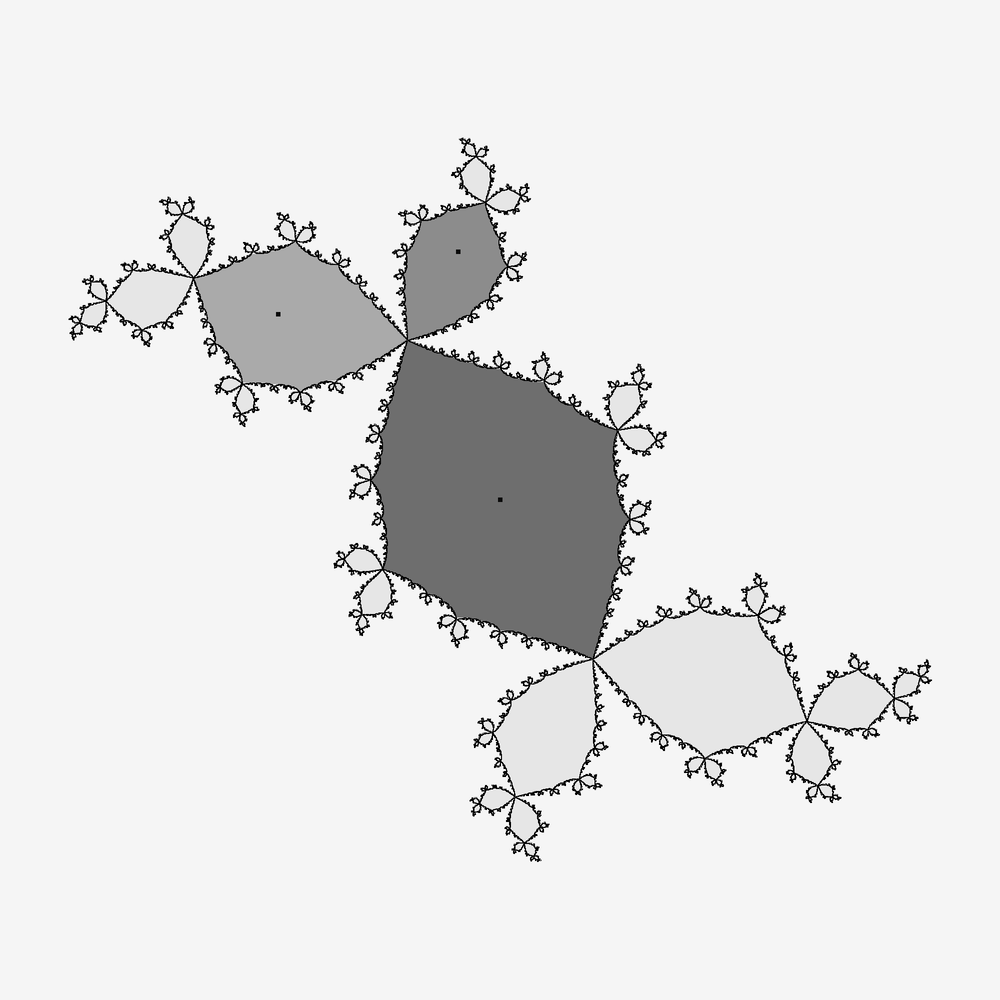
:
끌개는 다음 세 가지 조건으로 특징지어지는 부분 집합 이다.
- 는 에 대해 ''순방향 불변''이다. 즉, 가 의 요소라면, 모든 에 대해 도 에 속한다.
- 의 근방이 존재하며, 이를 의 "끌개", 로 표기하며, 의 극한에서 에 "진입"하는 모든 점 로 구성된다. 보다 공식적으로, 는 다음 속성을 가진 위상 공간의 모든 점 의 집합이다.
:: 의 모든 열린 근방 에 대해, 모든 실수 에 대해 을 만족하는 양의 상수 가 존재한다.
- 처음 두 속성을 갖는 의 진부분 집합(비어 있지 않음)은 없다.
끌개는 를 포함하는 열린 집합을 포함하는 끌개이므로, 에 충분히 가까운 모든 점은 로 끌린다. 끌개의 정의는 위상 공간에 대한 거리를 사용하지만, 결과적인 개념은 일반적으로 위상 공간의 위상에만 의존한다. 의 경우, 유클리드 노름이 일반적으로 사용된다.
끌개의 다른 많은 정의가 문헌에 나타난다. 예를 들어, 일부 저자는 끌개가 양의 측도를 갖도록 요구하고(점이 끌개가 되는 것을 방지), 다른 저자는 가 근방이어야 한다는 요구 사항을 완화한다.[5] 끌개의 끌개 유역은 반복이 정의된 위상 공간의 영역으로, 해당 영역의 모든 점 (모든 초기 조건)이 점근적 거동으로 끌개로 반복된다. 안정적인 선형 시스템의 경우, 위상 공간의 모든 점이 끌개 유역에 속한다. 그러나 비선형 시스템에서는 일부 점이 직접 또는 점근적으로 무한대로 매핑될 수 있으며, 다른 점은 다른 끌개 유역에 속하여 다른 끌개로 점근적으로 매핑될 수 있다. 다른 초기 조건은 비끌개 점이나 사이클에 있거나 직접 매핑될 수 있다.

어트랙터(attractor)는 "끌어당기는"을 의미하는 영어 단어 attract에서 유래된 단어로 대략적으로 말하면 어트랙터는 그 주변의 궤도를 끌어당기는 성질을 가진 영역이다. 더욱이 궤도가 그러한 영역까지 끌어당겨진 후에는 궤도는 그 영역 안에 계속 머물게 된다.
어트랙터의 엄밀한 정의에 대해서는 논의가 남아 있으며, 널리 공유되는 통일적인 수학적 정의는 아직 존재하지 않는다. 여기서는 먼저 역학계의 상 공간을 으로 하고, 상 공간 위의 점(상태 변수)을 로 하는 정의를 설명한다. 연속 역학계를 정하는 벡터장의 흐름을 로 나타낸다. 이산 역학계를 정하는 사상의 회 반복 적용을 로 나타낸다. 부분 집합 가 다음을 만족할 때, 를 '''흡인 집합'''이라고 부른다.
- 연속 역학계의 경우:
- 는 폐불변집합, 즉 모든 와 에 대해 이다.
- 에 있는 근방 가 존재하여, 모든 와 에 대해 이다.
- 모든 에 대해, 일 때 이다.
- 이산 역학계의 경우:
- 는 폐불변집합, 즉 모든 와 에 대해 이다.
- 에 있는 근방 가 존재하여, 모든 와 에 대해 이다.
- 모든 에 대해, 일 때 이다.
더 나아가, 흡인 집합과 흐름의 조 또는 흡인 집합과 사상의 조 가 다음과 같이 위상적 추이성을 만족할 때, 를 '''어트랙터'''라고 부른다.
- 연속 역학계의 경우:
- 의 임의의 부분 열린 집합 , 에 대해, 모든 가 를 만족하는 이 존재한다.
- 이산 역학계의 경우:
- 의 임의의 부분 열린 집합 , 에 대해, 모든 가 를 만족하는 가 존재한다.
역학계의 위상적 추이성 또는 추이성이란, 간단히 말하면 궤도가 그 영역 안을 구석구석 움직이는 것을 의미한다. 위상적 추이성을 어트랙터의 조건으로 부과하기도 한다. 조밀한 궤도의 존재라는 형태로 어트랙터를 정의하기도 한다. 위상적 추이성 대신 가 극소 집합인 것, 즉 의 모든 진부분집합이 흡인 집합의 조건을 만족하지 않는 것을 어트랙터의 정의로 하기도 한다.

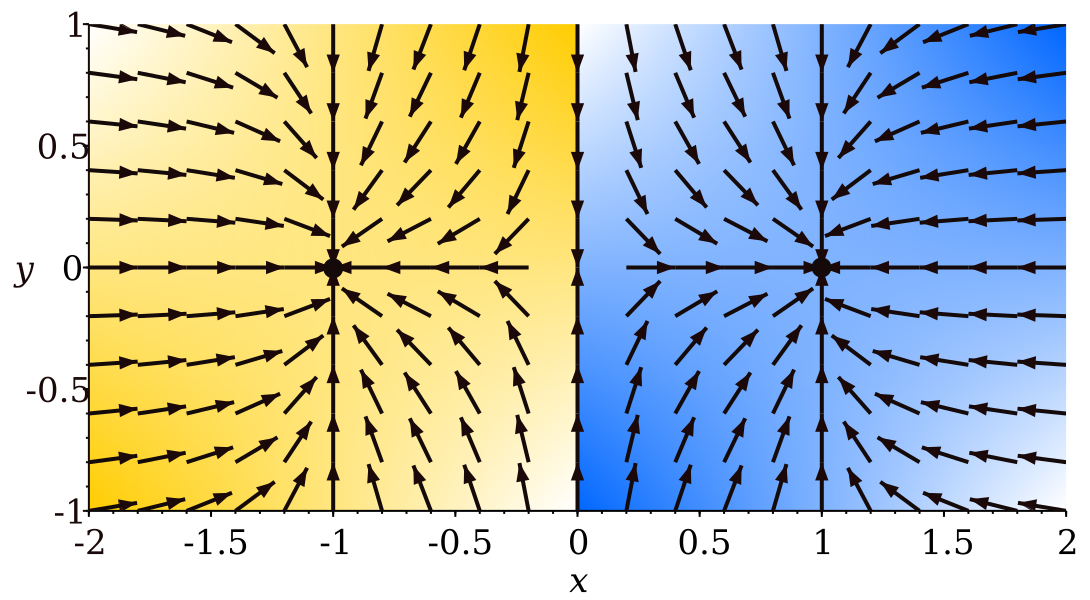
어느 쪽이든, 흡인 집합에 더 나아가 위상적 추이성이나 극소의 조건을 부과하는 이유는, 인정한 어트랙터가 사실 독립적인 어트랙터의 집합이며, 실제로는 더욱 세분될 수 있는 사태를 피하고 싶다는 동기에서 비롯된다. 흡인 집합의 조건만으로는 궤도가 최종적으로 어디에 정착하는지 모호하다는 결점이 있다. 이 점을 설명하는 예로 자주 나오는 것이 다음 의 2차원 벡터장이다.
:
:
여기서, 위첨자 ·는 시간 미분 ()을 의미한다. 이 벡터장의 -상 평면의 라는 선분상의 집합을 로 한다. 를 둘러싸는 직사각형이나 타원과 같은 적당한 근방을 취하면, 근방 안의 점은 모두 에 수렴한다. 또한, 위의 점이 에서 나올 수 없다. 따라서, 는 흡인 집합이다. 그러나, 축을 제외한 상 평면상의 거의 모든 점은, 또는 중 하나로만 수렴한다. 이 예라면 를 어트랙터로 생각하고 싶지 않고, 과 에 어트랙터가 2개 있다고 생각하고 싶고, 그것이 위상적 추이성을 어트랙터의 정의에 부과하는 동기이다.
한편, 위상적 추이성을 부과하지 않는 조건의 집합, 즉 위에서 말한 흡인 집합을 어트랙터의 정의로 하기도 한다. 이처럼 흡인 집합을 어트랙터라고 부를 때는, 위상적 추이성을 만족하는 집합 를 '''추이적 어트랙터'''라고 부르기도 한다.
역학계가 체적 요소가 축소되는 성질을 가질 때, 그 역학계를 소산계라고 한다. 소산계 위에는 어트랙터가 존재하고, 소산계 위의 모든 궤도는 어트랙터로 끌려간다. 소산계의 성질에서 유도되는 필연으로, 또는 어트랙터에 부과하는 정의로서, 어트랙터의 체적은 일반적으로 0이 된다. 즉, 상 공간 위의 어트랙터의 (통상적인 의미에서의) 체적은 0이고, 상 공간 위의 어트랙터의 면적은 0이다. 이러한 귀결로서, 어트랙터의 차원 는 상 공간의 차원 보다 항상 작고, 의 관계에 있다. 더욱이 체적 축소의 결과, 어트랙터로 끌려들어가는 궤도의 초기값의 정보는 사라지게 된다. 즉, 어트랙터로 끌려들어간 후의 점에서, 시간을 거슬러 그 점의 초기값을 아는 것은 불가능하게 된다. 또한, 어트랙터에 일단 끌려들어간 궤도는, 이후 어트랙터에서 나오는 일은 없다. 이것은, 어트랙터가 불변집합으로 정의되는 것에 대응한다.
어트랙터에 끌리는 모든 초기 값의 집합을 '''베이슨''' (basin of attraction|links=no영어), '''흡인 영역''', '''인력권''' 등으로 부른다. 영어의 basin에는 그릇의 의미가 있으며, 그릇 안에 놓인 물건이 그릇의 바닥으로 굴러가는 이미지에서 명명된 것으로 추측된다.
수학적으로는, 어트랙터의 정의에 나오는 근방 내에서, 다양한 크기를 가질 수 있는 최대 가 베이슨이다. 어떤 어트랙터에 대한 베이슨은, 그 어트랙터 자체를 포함한다. 또한, 어트랙터는 산란계의 특성상 체적이 0이지만, 베이슨의 체적은 0이 아니다. 다시 말해, 어트랙터에 끌려들어가는 초기 값의 집합의 측도는 0이 아닌 값을 가진다. 이 점과 극점 집합의 개념을 사용하여, 어트랙터를 비영(非零)의 측도의 초기 값을 끌어들이는 극점 집합으로 정의하는 방법도 있다.
베이슨에서 어트랙터로 끌려들어가는 계의 거동을 '''과도 상태''', '''과도 운동''', '''트랜지언트''' (transient|links=no영어) 등으로 부른다. 정의상 시간은 무한히 지나갔을 때 궤도는 어트랙터에 끌려들어가게 되어 있지만, 어트랙터 주위에 도달한 후 궤도는 어트랙터 위와 같은 거동을 하므로, 유한한 시간 안에 어트랙터에 끌려들어간 것으로 간주하여 실제적인 문제는 그다지 발생하지 않는다.
또한, 어트랙터 또는 흡인 집합과 관련하여 '''트래핑 영역''' (trapping region|links=no영어), '''포착 영역''', '''가둠 영역''' 등으로 불리는 위상 공간 상의 영역도 있다. 이것은, 모든 정방향 궤도가 거기에서 나올 수 없는 영역을 의미한다. 구체적으로, 트래핑 영역 은 다음 조건을 만족하는 유계 폐집합이다.
- 연속 역학계의 경우:
- 임의의 에 대해, 이 된다.
- 이산 역학계의 경우:
- 이 된다.
연속 역학계의 트래핑 영역은, 의 경계의 어떤 점에서도 벡터장이 의 내부를 향하고 있는 것과 동등하다. 트래핑 영역 을 사용하여 흡인 집합 를 다음과 같이 정의할 수도 있다.
- 연속 역학계의 경우:
- 이산 역학계의 경우:
그 외의 개념으로, '''리펠러''' (repeller|links=no영어) 가 있다. 이것은, 시간을 반전시켰을 때 흡인적이 되는 해를 가리킨다. 이산 역학계 라고 한다면, 역사상 의 어트랙터가 의 리펠러라고 정의할 수 있다. 불안정한 성질을 가지고 궤도가 멀어져 가는 고정점이나 평형점이, 리펠러의 예이다.
3. 배경
동역학계는 일반적으로 하나 이상의 미분 또는 차분 방정식으로 설명된다. 주어진 동역학계의 방정식은 주어진 짧은 시간 동안의 동작을 명시한다. 물리 세계의 동역학계는 일반적으로 소산 시스템에서 발생한다. 어떤 구동력이 없다면 운동은 멈출 것이다. (소산은 내부 마찰, 열역학적 손실, 또는 물질 손실 등 여러 원인에서 비롯될 수 있다.)[3] 소산과 구동력은 균형을 이루는 경향이 있어, 초기 과도 현상을 제거하고 시스템을 전형적인 동작으로 안정시킨다. 전형적인 동작에 해당하는 동역학계의 위상 공간의 하위 집합은 끌개(어트랙터)이며, 유인 부분 또는 피유인자라고도 한다.
불변 집합과 극한 집합은 끌개 개념과 유사하다. ''불변 집합''은 동역학에 따라 그 자체로 진화하는 집합이다.[3] 끌개는 불변 집합을 포함할 수 있다. ''극한 집합''은 시간이 무한대로 갈 때 일부 초기 상태가 극한 집합(즉, 집합의 각 점)에 임의로 가까워지는 점의 집합이다. 끌개는 극한 집합이지만, 모든 극한 집합이 끌개인 것은 아니다. 시스템의 일부 점이 극한 집합으로 수렴할 수 있지만, 극한 집합에서 약간 벗어난 다른 점이 튕겨 나가 극한 집합 근처로 다시 돌아오지 않을 수 있다.
예를 들어, 감쇠된 진자는 두 개의 불변점을 갖는다: 최소 높이의 점과 최대 높이의 점. 점는 궤적이 이 점으로 수렴하기 때문에 극한 집합이기도 하며, 점은 극한 집합이 아니다. 공기 저항으로 인한 소산 때문에 점는 또한 끌개이다. 만약 소산이 없다면,는 끌개가 아닐 것이다.
어떤 상태의 시간 발전이 규칙에 따라 결정론적으로 유일하게 결정되는 계를 역학계라고 한다. 일반적으로 역학계의 거동은 "보존적" 또는 "산일적"으로 분류할 수 있다. 물리적인 계로서 용수철이나 진자의 계를 생각해 보면, 계에 마찰이 없을 때는 역학적 에너지가 계속 보존되는 반면, 계에 마찰이 있을 때는 역학적 에너지가 열로 변환되어 계에서 손실된다. 전자의 계를 보존계라고 부르고, 후자의 계를 산일계라고 부른다. 일상적으로 관측되는 실존하는 계의 대부분은 산일계라고 할 수 있다. 물리적인 관점에서 보면, 산일계는 에너지적으로 개방되어 있는 것이 특징이며, 비평형 개방계라고도 불린다.[14] 마찰이 있는 진자는 시간이 충분히 지나면 정지한다. 그러나 산일계라도 에너지가 유출되는 것과 동시에 유입되어 균형을 이루면, 최종적인 운동이 정지 상태가 아니라 안정적인 진동 상태를 취할 수도 있다.[14]
역학계에서는 대상이 되는 상태를 변수의 조합으로 나타내고, 그것을 공간상의 1점으로 간주한다. 시간 발전에 따라 움직이는 공간상의 점의 궤적은 궤도라고 불리며, 상태의 시간 변화를 나타낸다. 상태의 집합인 공간은 위상 공간 또는 상태 공간이라고 불린다. 산일계는 수학적으로 위상 공간 위에 체적 요소를 취했을 때 그 요소의 체적이 시간 발전에 따라 감소해 가는 계를 가리킨다(여기서의 체적은 3차원 이상 2차원 이하를 포함하는 일반화된 체적이며, 특별한 언급이 없으면 이하 동일하다). 산일계에서는 위상 공간상의 궤도가 어떤 일정한 영역(상태의 집합)으로 끌어당겨지는 현상이 존재한다. 이러한 영역을 끌개라고 부른다. 한편 보존계에서는 끌개가 존재하지 않는다.
끌개(attractor)는 "끌어당기는"을 의미하는 영어 단어 attract에서 유래된 단어로, 대략적으로 말하면 끌개는 그 주변의 궤도를 끌어당기는 성질을 가진 영역이다. 더욱이 궤도가 그러한 영역까지 끌어당겨진 후에는 궤도는 그 영역 안에 계속 머물게 된다.
4. 분류
끌개는 그 모양에 따라서 다음과 같이 분류된다.
- '''고정점'''(fixed point영어): 하나의 점만을 포함하는 끌개이다.
- '''극한 주기 궤도'''(極限週期軌道, limit cycle영어): 원과 위상동형인 끌개이다.
- '''극한 원환면'''(極限圓環面, limit torus영어): 원환면과 위상동형인 끌개이다.
- '''이상한 끌개'''(strange attractor영어): 유한개의 간단한 기하학적 모양(초구, 원환면, 원환체 등)의 합집합으로 나타낼 수 없는, 프랙털 구조를 가진 끌개이다.

1960년대까지 끌개는 점, 선, 표면, 간단한 3차원 공간 영역과 같은 단순 기하학적 부분 집합으로 여겨졌다. 그러나 스티븐 스메일은 그의 말굽 매핑이 구조적 안정성을 가지며, 해당 끌개가 칸토어 집합의 구조를 가진다는 것을 증명하여, 단순 기하학적 부분 집합으로 분류할 수 없는 더 복잡한 끌개가 존재함을 보였다.
끌개는 동역학계의 위상 공간의 일부 또는 부분 집합이며, 그 주변의 궤도를 끌어당기는 성질을 가진 영역이다. 궤도가 끌개에 끌어당겨진 후에는 그 영역 안에 계속 머무르게 된다. 끌개의 엄밀한 정의에 대해서는 논의가 남아 있으며, 널리 공유되는 통일적인 수학적 정의는 아직 존재하지 않는다.
4. 1. 고정점 (Fixed point)
하나의 점만을 포함하는 끌개는 '''고정점'''(fixed point영어})이라고 한다.[3] 고정점은 함수 또는 변환에 의해 자신에게 매핑되는 점이다. 동적 시스템의 진화를 일련의 변환으로 간주하면 각 변환에서 고정된 상태로 유지되는 점이 있을 수도 있고 없을 수도 있다. 동적 시스템이 진화하는 최종 상태는 감쇠된 진자의 중심 하단 위치, 유리잔에서 물이 찰랑거리는 수준과 평평한 수면, 또는 구르는 구슬이 담긴 그릇의 바닥 중심과 같은 인력 고정점에 해당한다.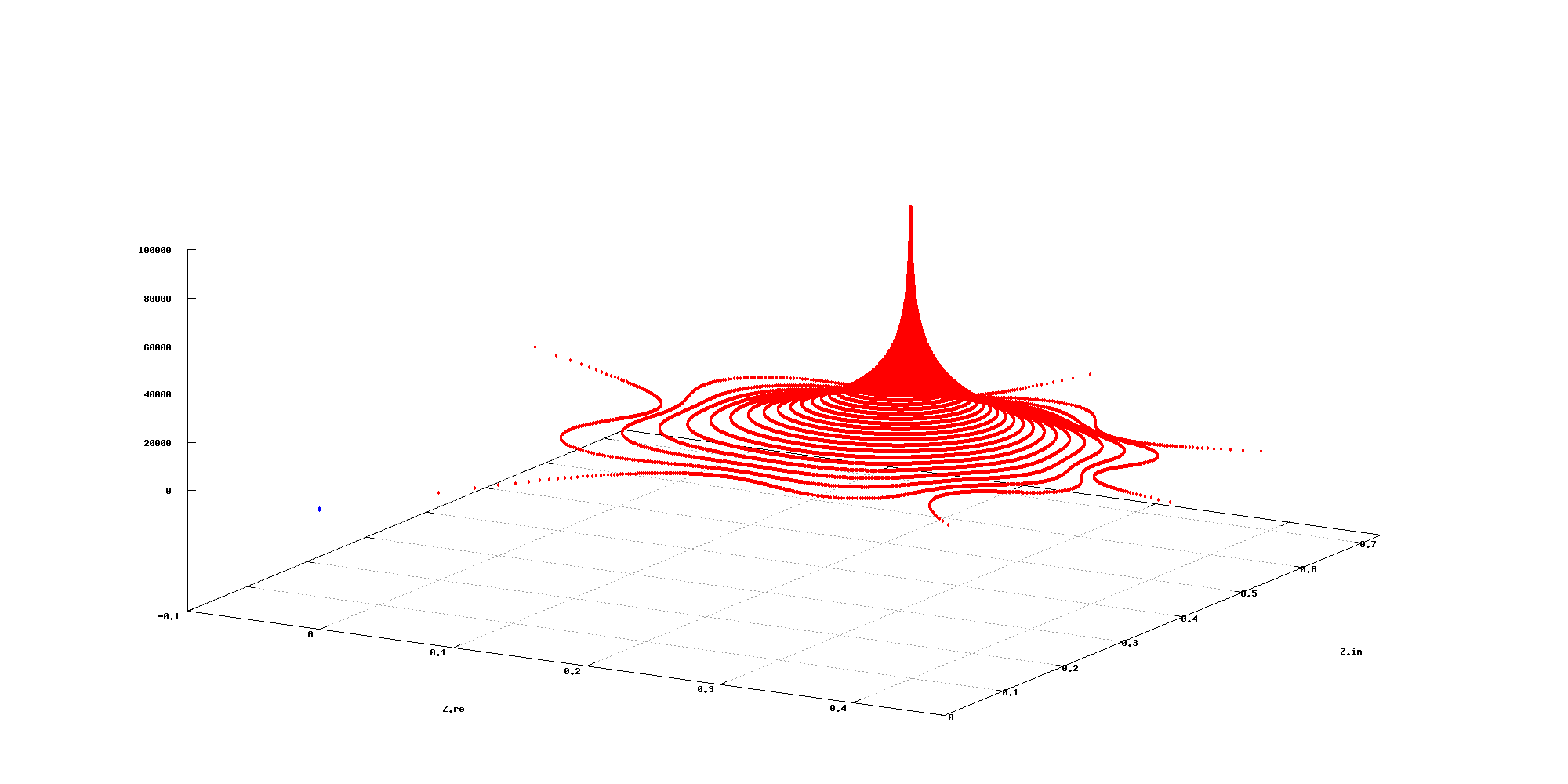
하지만 동적 시스템의 고정점이 반드시 시스템의 어트랙터인 것은 아니다. 예를 들어, 구르는 구슬이 담긴 그릇이 뒤집혀 있고 구슬이 그릇 위에 균형을 이루고 있다면 그릇의 중심 하단(이제 상단)은 고정된 상태이지만 어트랙터는 아니다. 이는 안정 및 불안정 평형의 차이와 동일하다. 뒤집힌 그릇(언덕) 위의 구슬의 경우, 그릇(언덕) 상단의 해당 지점은 고정점(평형)이지만 어트랙터(불안정 평형)는 아니다.
또한 적어도 하나의 고정점을 가진 물리적 동적 시스템은 스틱션, 마찰, 표면 거칠기, 변형 (탄성 및 소성 모두) 및 심지어 양자역학을 포함한 물리적 세계의 역학적 현실 때문에 항상 여러 개의 고정점과 어트랙터를 갖는다.[6] 뒤집힌 그릇 위의 구슬의 경우, 그릇이 완벽하게 반구형인 것처럼 보이고 구슬이 구형 모양일지라도 현미경으로 관찰하면 훨씬 더 복잡한 표면이며, 접촉하는 동안 모양이 변하거나 변형된다. 모든 물리적 표면은 여러 개의 봉우리, 계곡, 안장점, 능선, 협곡 및 평원이 있는 거친 지형을 갖는 것으로 볼 수 있다.[7] 이 표면 지형(및 이와 유사하게 거친 구슬이 이 미세한 지형 위에서 굴러가는 동적 시스템)에는 정지 또는 고정점으로 간주되는 많은 점이 있으며, 그 중 일부는 어트랙터로 분류된다.
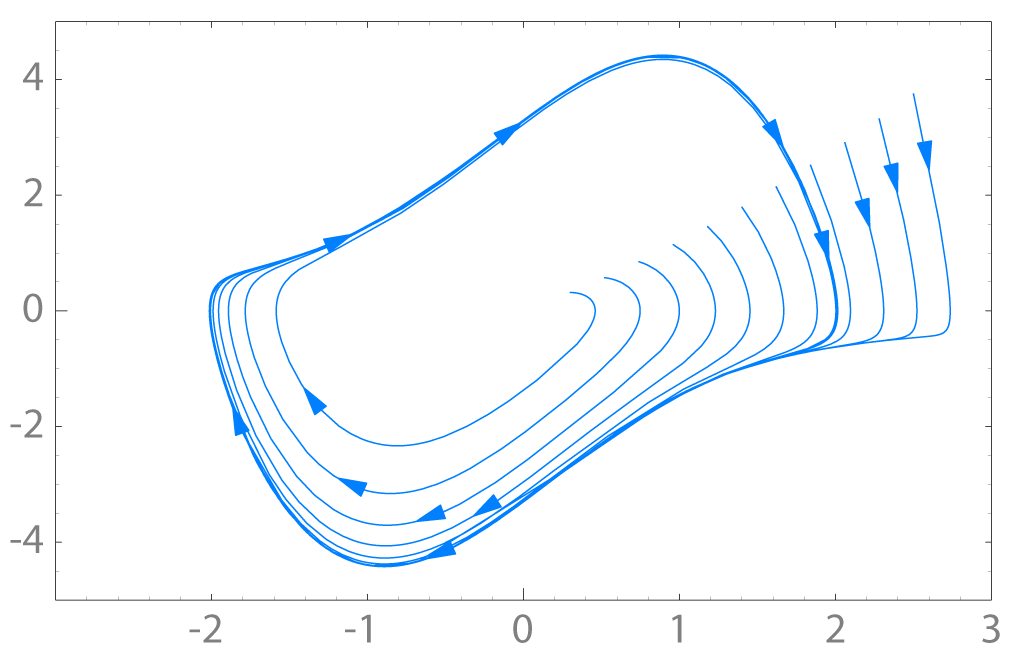
4. 2. 극한 주기 궤도 (Limit cycle)
극한 주기는 연속적인 동역학계의 고립된 주기 궤도이다. 순환 끌개와 관련이 있으며, 진자 시계의 진동, 휴식 시의 심박동 등이 그 예시이다. 이상적인 진자의 극한 주기는 궤도가 고립되어 있지 않기 때문에 극한 주기 끌개의 예시가 아니다. 이상적인 진자의 위상 공간에서 주기 궤도의 임의의 점 근처에는 다른 주기 궤도에 속하는 또 다른 점이 있으므로 이전 궤도는 끌개가 아니다. 마찰이 있는 물리적인 진자의 경우, 정지 상태는 고정점 끌개가 된다. 시계 진자와의 차이점은 탈진기 메커니즘에 의해 에너지가 주입되어 주기를 유지한다는 것이다.[3]4. 3. 극한 원환면 (Limit torus)
원환면과 위상동형인 끌개는 '''극한 원환면'''(limit torus영어)이라고 한다. 리미트 사이클의 상태를 통해 시스템의 주기적인 궤도에는 둘 이상의 주파수가 있을 수 있다. 예를 들어 물리학에서 한 주파수는 행성이 별을 공전하는 속도를, 두 번째 주파수는 두 물체 사이의 거리 변화를 설명한다. 이러한 주파수 중 두 개가 무리수(공약 불가능)를 형성하면 궤도는 더 이상 닫히지 않고 리미트 사이클은 리미트 토러스가 된다.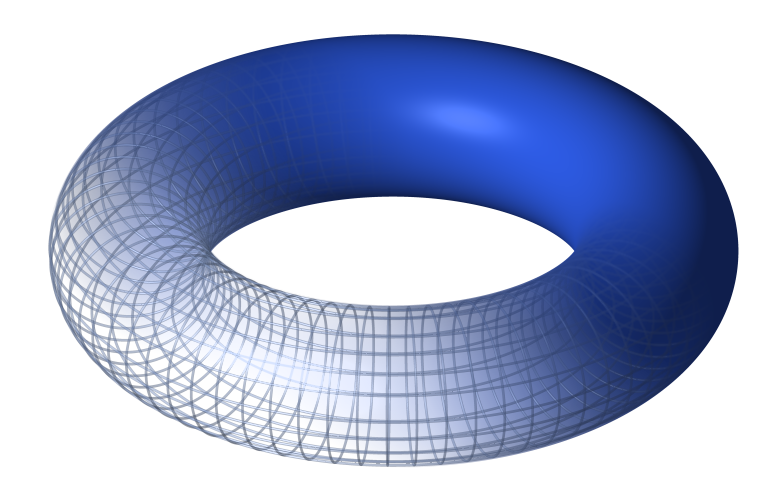
4. 4. 이상한 끌개 (Strange attractor)
끌개가 프랙털 구조를 가지는 경우, 즉 정수가 아닌 하우스도르프 차원을 갖는 경우 '이상하다'라고 불린다. 이는 해당 끌개에서의 역학이 카오스적일 때 흔히 나타나지만, 비카오스적 이상 끌개도 존재한다. 만약 이상 끌개가 카오스적이며, 초기 조건에 대한 민감한 의존성을 보인다면, 끌개 상의 임의로 가까운 두 개의 대체 초기점은 다양한 횟수의 반복 후에 임의로 멀리 떨어진 지점으로 이어질 것이고(끌개의 경계 내에서), 다른 다양한 횟수의 반복 후에는 임의로 가까운 지점으로 이어질 것이다. 따라서 카오스적 끌개를 가진 동적 시스템은 국소적으로 불안정하지만 전체적으로 안정적이다. 일단 어떤 시퀀스가 끌개에 진입하면, 근처의 점들은 서로 멀어지지만 끌개에서 벗어나지는 않는다.[8]
'이상한 끌개'라는 용어는 데이비드 뤼엘과 플로리스 타켄스가 유체 흐름을 설명하는 시스템의 일련의 분기 결과로 나타나는 끌개를 설명하기 위해 만들었다.[9] 이상 끌개는 종종 몇몇 방향에서 미분 가능하지만, 일부는 칸토어 먼지와 같아서 미분 가능하지 않다. 이상 끌개는 잡음이 있는 경우에도 발견될 수 있으며, 시나이-뤼엘-보웬 유형의 불변 확률 측도를 지원하는 것으로 나타날 수 있다.[10]
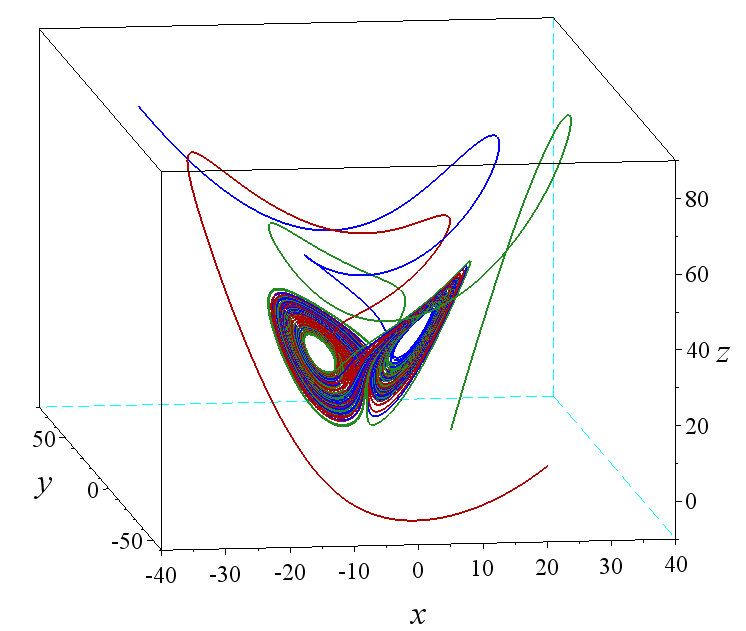
이상한 끌개의 예로는 이중 스크롤 끌개, 에논 끌개, 뢰슬러 끌개, 로렌츠 끌개 등이 있다.
5. 어트랙터의 변화
동적 방정식의 매개변수는 방정식이 반복될 때 진화하며, 시작 매개변수에 따라 특정 값이 달라질 수 있다. 로지스틱 맵 을 예로 들 수 있는데, 그림에는 매개변수 의 다양한 값에 대한 어트랙션의 분기가 나타나 있다.
- 인 경우: 또는 인 모든 시작 값은 음의 무한대로 발산한다. 그러나
- 인 경우:

이처럼 어떤 값에서는 어트랙터가 단일 지점("고정점")이 되고, 다른 값에서는 두 개의 값이 차례로 방문([주기 배가 분기]])되거나, 추가적인 배가의 결과로 개수의 값, 또는 임의의 값 개수가 차례로 방문된다. 일부 값의 경우 무한히 많은 점이 방문되기도 한다. 따라서 동일한 동적 방정식이 매개변수에 따라 다양한 유형의 어트랙터를 가질 수 있다.
복잡한 구조를 가지며 궤도가 카오스가 되는 유형의 어트랙터를 '''스트레인지 어트랙터'''(strange attractor)[23][24]라고 한다. 이 명칭은 데이비드 루엘과 타켄스가 제안했다. '''카오스 어트랙터''', '''카오틱 어트랙터''', '''카오스적 어트랙터''', '''기묘한 어트랙터''', '''프랙탈 어트랙터''' 등으로도 불린다.
역학계에서의 카오스는 결정론적으로 확정된 규칙에 따라 생성되는 복잡하고 불규칙하며 불안정한 행동을 가리킨다. 카오스의 엄밀한 정의는 전문가 사이에서도 미묘하게 다르며, 통일적인 수학적 정의는 아직 존재하지 않는다. 산일계에서의 카오스는 스트레인지 어트랙터를 의미한다.
과거에는 점 어트랙터, 주기 어트랙터, 준주기 어트랙터의 3가지 유형만 알려져 있었다. 스트레인지 어트랙터는 컴퓨터 발달로 수치 계산이 실용화된 1960년대에 발견되었다. "카오스"와 마찬가지로 스트레인지 어트랙터의 널리 공유된 정의는 현재로서는 존재하지 않는다. 스트레인지 어트랙터는 초기값 민감성을 만족하는 어트랙터로 정의할 수 있다. 초기값 민감성은 약간의 초기값 차이가 시간이 지남에 따라 점차 커지는 것을 의미하며, 나비 효과로도 알려져 있다.

에드워드 로렌츠가 열 대류를 모델링하여 도입한 로렌츠 방정식은 널리 알려진 연속 역학계의 스트레인지 어트랙터의 예시이다. 로렌츠가 사용한 파라미터는 이며, 이때 나타나는 어트랙터는 '''로렌츠 어트랙터'''로 불린다.
많은 스트레인지 어트랙터는 프랙탈 구조를 띠고 있다. 실제로, 프랙탈 구조를 갖는 어트랙터를 스트레인지 어트랙터의 정의로 삼는 경우도 있지만, 현재는 초기값 민감성이 더 중요하다고 여겨진다. 초기값 민감성은 스트레인지 어트랙터의 역학적, 동적인 특징을 나타내는 반면, 프랙탈 구조는 기하학적, 정적인 특징을 나타낸다.
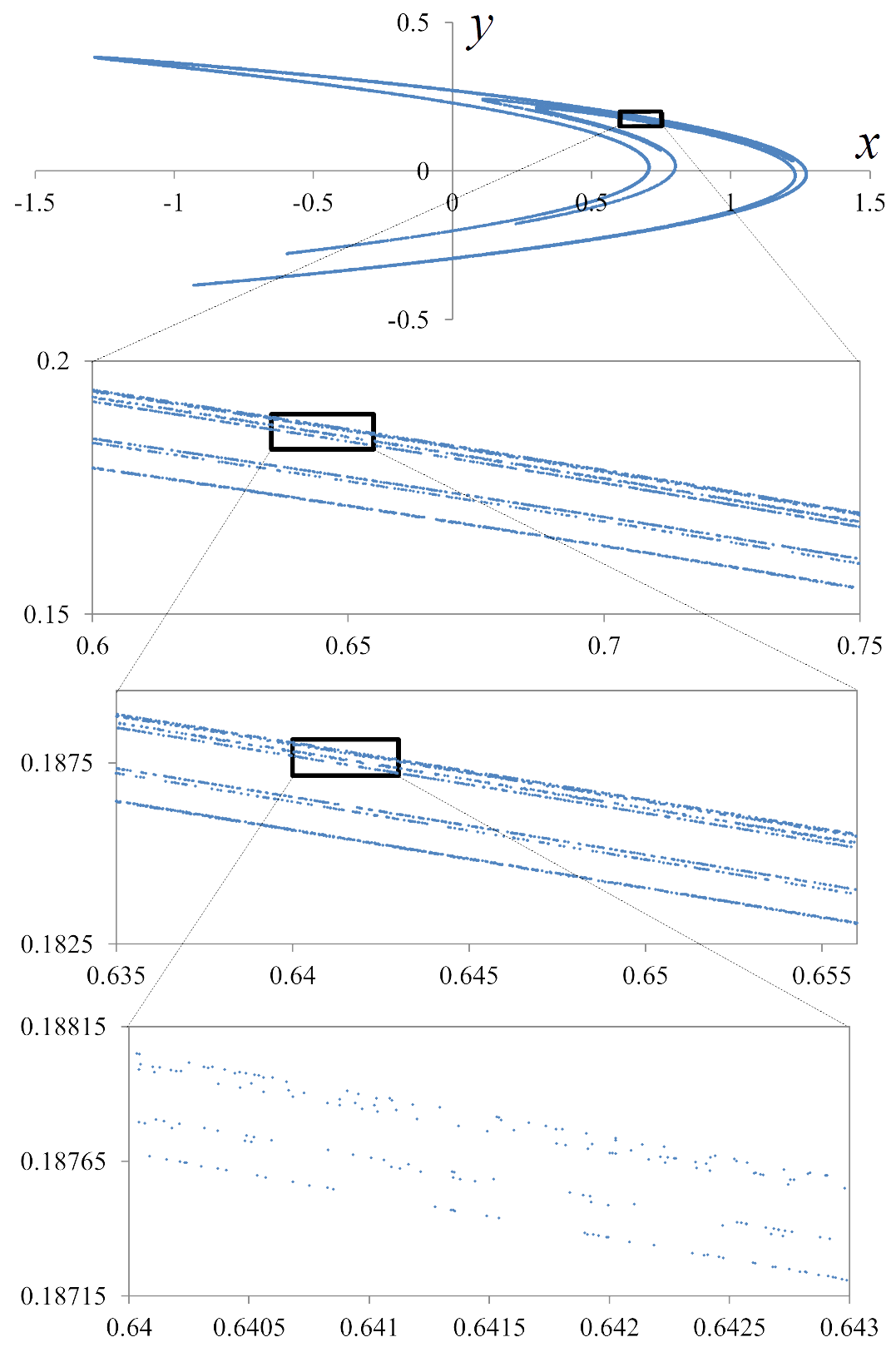
에논 사상은 스트레인지 어트랙터의 프랙탈 구조를 관찰하기 쉬운 이산 역학계의 예시이다. 에논 사상의 파라미터가 일 때 나타나는 '''에논 어트랙터'''는 바나나와 같은 형태로 꺾여 있으며, 확대하면 자기 유사형의 무한한 선으로 이루어져 있음을 알 수 있다. 에논 어트랙터의 차원은 박스 카운트 차원(프랙탈 차원의 일종) 1.26으로 계산된다.
스트레인지 어트랙터임을 엄밀하게 증명하는 것은 어렵고, 일반적 성질에 대한 해명도 충분히 이루어지지 않았다. 수치 계산 실험에서 스트레인지 어트랙터로 보이는 것도, 실제로는 매우 긴 주기를 갖는 주기 어트랙터일 가능성이 있다. 카오스임을 엄밀하게 증명할 수 있는 경우는 계가 쌍곡형인 경우에 거의 한정되어 있다. 쌍곡형 어트랙터를 갖는 예로는 파이 반죽 변환이나 토러스체에 정의되는 솔레노이드 등이 있다.
어트랙터가 비쌍곡형인 경우 해석은 어렵지만, 자연스러운 역학계의 대부분은 비쌍곡형이다. 유명한 로렌츠 어트랙터도 스트레인지 어트랙터임이 확실시되었지만, 수학적 증명은 오랫동안 제시되지 못하다가 2002년 워릭 터커가 정밀 보증 수치 계산과 해석적 기법을 조합하여 증명했다.[27]
5. 1. 어트랙터의 공존
하나의 계에는 여러 개의 어트랙터가 공존할 수 있다. 어트랙터가 여러 개 존재할 때는 베이슨(basin of attraction, 흡인 영역)의 분할이 일어나, 초기 조건에 따라 어느 어트랙터로 끌려 들어갈지가 결정된다.동적 방정식의 매개변수는 방정식이 반복될 때 진화하며, 특정 값은 시작 매개변수에 따라 달라질 수 있다. 예를 들어, 로지스틱 맵 에서는 매개변수 의 값에 따라 다양한 유형의 어트랙터가 나타난다.
- 일 때,
- 일 때,
이처럼, 어떤 값에서는 어트랙터가 단일 지점("고정점")이 되기도 하고, 다른 값에서는 두 개 이상의 값이 주기적으로 나타나거나([주기 배가 분기]]), 무한히 많은 점이 나타나기도 한다.
끌개의 끌개 유역(basin of attraction)은 반복이 정의된 위상 공간의 영역으로, 해당 영역의 모든 점(모든 초기 조건)이 점근적 거동으로 끌개로 반복된다. 안정적인 선형 시스템에서는 위상 공간의 모든 점이 끌개 유역에 속하지만, 비선형 시스템에서는 초기 조건에 따라 다른 끌개 유역에 속하거나 무한대로 발산할 수 있다.
비선형 방정식이나 비선형 시스템은 선형 시스템보다 더 다양한 동작을 보일 수 있다. 예를 들어, 뉴턴 방법을 사용하여 비선형 표현식의 근을 구할 때, 표현식이 둘 이상의 실수 근을 가지면, 일부 시작점은 한 근으로 수렴하고 다른 시작점은 다른 근으로 수렴한다. 이때, 각 근에 대한 인력 분지는 단순하지 않고 무한히 많고 임의로 작을 수 있다.[12]
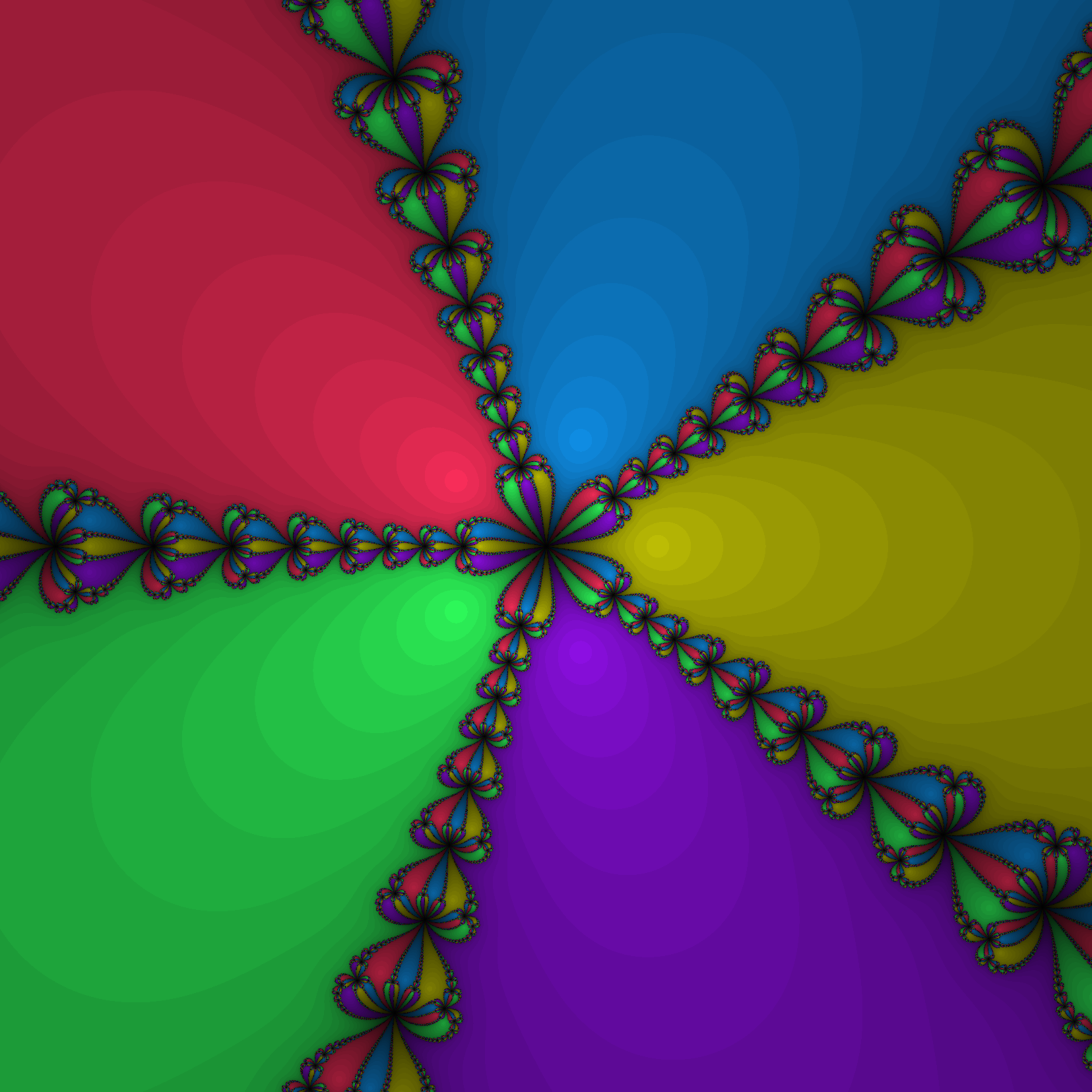
예를 들어, 함수 에 대해, 다음 초기 조건은 연속적인 인력 분지에 있다.[12]
- 2.35287527는 4로 수렴한다.
- 2.35284172는 −3으로 수렴한다.
- 2.35283735는 4로 수렴한다.
- 2.352836327는 −3으로 수렴한다.
- 2.352836323는 1로 수렴한다.
뉴턴 방법은 복소 함수의 근을 찾는 데에도 적용될 수 있으며, 각 근은 복소 평면에 인력 분지를 가진다. 이 분지들은 위 이미지와 같이 매핑될 수 있으며, 특정 근에 대한 결합된 인력 분지는 여러 개의 분리된 영역을 가질 수 있다. 많은 복소 함수의 경우, 인력 분지의 경계는 프랙탈이다.
어트랙터에 끌리는 모든 초기값의 집합을 '''베이슨''' (basin of attraction|links=no영어), '''흡인 영역'''[15] 등으로 부른다. 영어의 basin에는 그릇의 의미가 있으며, 그릇 안에 놓인 물건이 그릇의 바닥으로 굴러가는 이미지에서 명명된 것으로 추측된다.
수학적으로 어트랙터의 정의에 나오는 근방 내에서, 다양한 크기를 가질 수 있는 최대 가 베이슨이다. 어떤 어트랙터에 대한 베이슨은 그 어트랙터 자체를 포함한다. 또한, 어트랙터는 산란계의 특성상 체적이 0이지만, 베이슨의 체적은 0이 아니다. 다시 말해, 어트랙터에 끌려들어가는 초기값의 집합의 측도는 0이 아닌 값을 가진다. 이 점과 극점 집합의 개념을 사용하여, 어트랙터를 비영(非零)의 측도의 초기값을 끌어들이는 극점 집합으로 정의하는 방법도 있다.
베이슨에서 어트랙터로 끌려들어가는 계의 거동을 '''과도 상태''', '''과도 운동''', '''트랜지언트''' (transient|links=no영어) 등으로 부른다. 정의상 시간은 무한히 지나갔을 때 궤도는 어트랙터에 끌려들어가게 되어 있지만, 어트랙터 주위에 도달한 후 궤도는 어트랙터 위와 같은 거동을 하므로, 유한한 시간 안에 어트랙터에 끌려들어간 것으로 간주하여 실제적인 문제는 그다지 발생하지 않는다.
어트랙터 또는 흡인 집합과 관련하여 '''트래핑 영역''' (trapping region|links=no영어), '''포착 영역''', '''가둠 영역''' 등으로 불리는 위상 공간 상의 영역도 있다. 이것은 모든 정방향 궤도가 거기에서 나올 수 없는 영역을 의미한다. 구체적으로, 트래핑 영역 은 다음 조건을 만족하는 유계 폐집합이다.
- 연속 역학계의 경우:
- 임의의 에 대해, 이 된다.
- 이산 역학계의 경우:
- 이 된다.
연속 역학계의 트래핑 영역은, 의 경계의 어떤 점에서도 벡터장이 의 내부를 향하고 있는 것과 동등하다. 트래핑 영역 을 사용하여 흡인 집합 를 다음과 같이 정의할 수도 있다.
- 연속 역학계의 경우:
- 이산 역학계의 경우:
그 외의 개념으로, '''리펠러''' (repeller|links=no영어) 가 있다. 이것은 시간을 반전시켰을 때 흡인적이 되는 해를 가리킨다. 이산 역학계 라고 한다면, 역사상 의 어트랙터가 의 리펠러라고 정의할 수 있다. 불안정한 성질을 가지고 궤도가 멀어져 가는 고정점이나 평형점이 리펠러의 예이다.
5. 2. 복잡한 베이슨
끌개가 단순한 형태를 띠더라도, 그 베이슨(basin)의 형태가 항상 단순하다고는 할 수 없다. 특히, 여러 개의 끌개가 존재하는 경우에는 베이슨들 사이의 경계가 프랙탈이 되기도 한다.예를 들어, 비선형 표현식의 근을 구하기 위한 뉴턴 방법의 반복을 생각해보자. 표현식이 둘 이상의 실수 근을 갖는 경우, 반복 알고리즘의 일부 시작점은 점근적으로 하나의 근으로 이어지지만, 다른 시작점은 다른 근으로 이어진다. 이때, 표현식의 근에 대한 인력 분지는 일반적으로 단순하지 않다. 즉, 한 근에 가장 가까운 점들이 모두 그 근으로 매핑되어 인접한 점들로 구성된 인력 분지를 형성하는 것이 아니다. 인력 분지는 무한히 많고 임의로 작을 수 있다.[12]
뉴턴 방법은 복소 해석의 근을 찾는 데에도 적용될 수 있다. 각 근은 복소 평면에 인력 분지를 가지며, 이 분지들은 복잡한 형태를 띨 수 있다. 많은 복소 함수의 경우, 인력 분지의 경계는 프랙탈 구조를 가진다.
리들 베이슨(riddled basin)은 특수하고 복잡한 베이슨의 한 종류이다.
5. 3. 분기 현상, 카오스로의 경로
계의 매개변수가 변화함에 따라, 특정 임계값을 경계로 계의 정성적인 움직임이 바뀔 수 있다. 이러한 현상을 분기라고 한다. 주기 배가 분기 경로, 간헐성 경로, 준주기 붕괴 경로는 널리 알려진 카오스에 이르는 경로이다.로지스틱 맵의 분기 다이어그램을 예로 들 수 있다. 매개변수 의 값에 따라 끌개의 양상이 달라지는 것을 확인할 수 있다. 일 때는 모든 초기 조건 (
6. 시계열 데이터로부터의 재구성
시간 발달 법칙을 미리 알고 있는 계라면, 수치 계산으로 어트랙터를 그리는 것은 쉽다. 하지만, 실제 실험 데이터 등에서는 그 시간 발달 법칙이 불확실한 경우가 많다. 더욱이, 시간 발달 법칙을 추정할 수 있더라도, 그 계를 구성하는 여러 상태 변수 중 일부, 극단적으로는 하나의 상태 변수만 측정 가능한 경우도 많다.
이러한 상황에서 측정 데이터로부터 계의 거동을 재구성하는 문제는, 많은 공학자와 과학자에게 중요한 과제이다.[39] 하나의 상태 변수의 시계열 데이터로부터 계의 어트랙터를 재현하는 기법은 '''어트랙터 재구성'''(attractor reconstruction영어)으로 알려져 있으며,[9] 특히 불규칙적인 시계열 데이터에 대해 결정론적 역학계 관점에서 해석을 시도할 때 어트랙터 재구성이 해석의 기초가 된다.[32]
6. 1. 시간 지연 좌표계로의 변환
1개의 상태 변수의 시계열 데이터로부터 계의 어트랙터를 재현하는 기법은 어트랙터 재구성으로 알려져 있다. 측정된 시계열 데이터를 시간 지연 좌표계로 변환하는 기법이 널리 이용된다.6. 2. 임베딩 차원과 시간 지연의 최적화
끌개를 재구성할 때, 임베딩 차원()과 시간 지연()을 어떻게 결정하는지가 문제가 된다. 임베딩 차원과 시간 지연의 최적값을 결정하는 여러 방법이 제안되고 있다.임베딩 차원에 대해서는, 이론적으로는 이면 충분하지만, 이 이보다 작더라도 임베딩이 가능할 수 있다. 하지만 임베딩 차원이 너무 작으면 재구성된 곡선에서 자기 교차가 발생하여 1대1 대응이 되지 않는다. 반면, 임베딩 차원을 너무 크게 하면 계산 비용이 증가하고 예측에 악영향을 줄 수 있다[33]。 따라서, 먼저 끌개의 차원을 추정하는 것이 일반적이다[33]。
카오스 시계열 분석에서는 상관 차원을 주로 사용하며, GP알고리즘을 통해 비교적 쉽게 계산할 수 있다. 임베딩 차원을 늘려가면서 재구성된 끌개의 상관 차원을 계산하고, 상관 차원의 증가가 둔화되는 지점에서의 상관 차원 값을 끌개의 차원으로, 해당 임베딩 차원을 최적의 값으로 설정한다. 또는, 끌개 차원 추정 없이, 임베딩 차원 부족으로 발생하는 자기 교차가 해소되는 값을 지표를 통해 추정하는 방법도 있다.
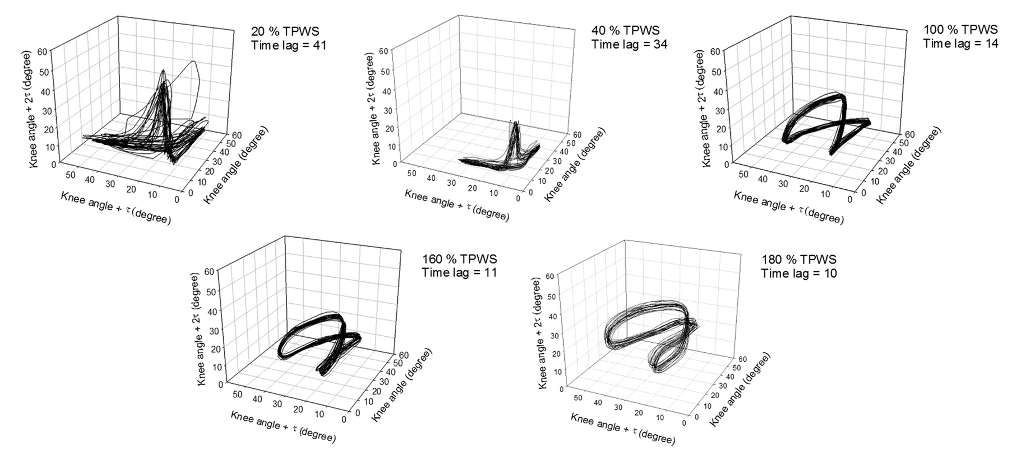
시간 지연()은 이론적으로는 임의로 설정해도 되지만, 실제로는 너무 작으면 데이터 간 상관이 너무 높아져 재구성된 끌개가 찌그러지고, 너무 크면 궤도 불안정성으로 인해 상관이 거의 사라져 잡음처럼 보이는 문제가 발생한다.
일반적으로 끌개의 평균 주기의 1/2에서 1/10 정도의 값으로 설정하거나, 자기상관함수를 계산하여 첫 번째 극소값 또는 0이 되는 지점의 시간 지연을 최적의 값으로 설정한다. 하지만, 시간 지연의 최적값 결정에는 다양한 방법이 제안되고 있으며, 아직까지 명확한 결론은 없다.
6. 3. 실제 현상에의 적용
시간 지연 좌표계로의 변환을 이용하는 기법은 일반적인 신호 분석으로는 파악하기 어려운 현상, 특히 카오스가 관여하는 복잡한 비선형 신호 데이터 해명에 유효하다.[34] 실제 현상의 실험 측정 데이터로부터 어트랙터 재구성에 성공한 사례로는 화학 진동 반응의 벨로우소프-자보친스키 반응에서의 스트레인지 어트랙터나 2원통 간의 테일러-쿠에트 흐름에서의 준주기 진동이 있다.[31]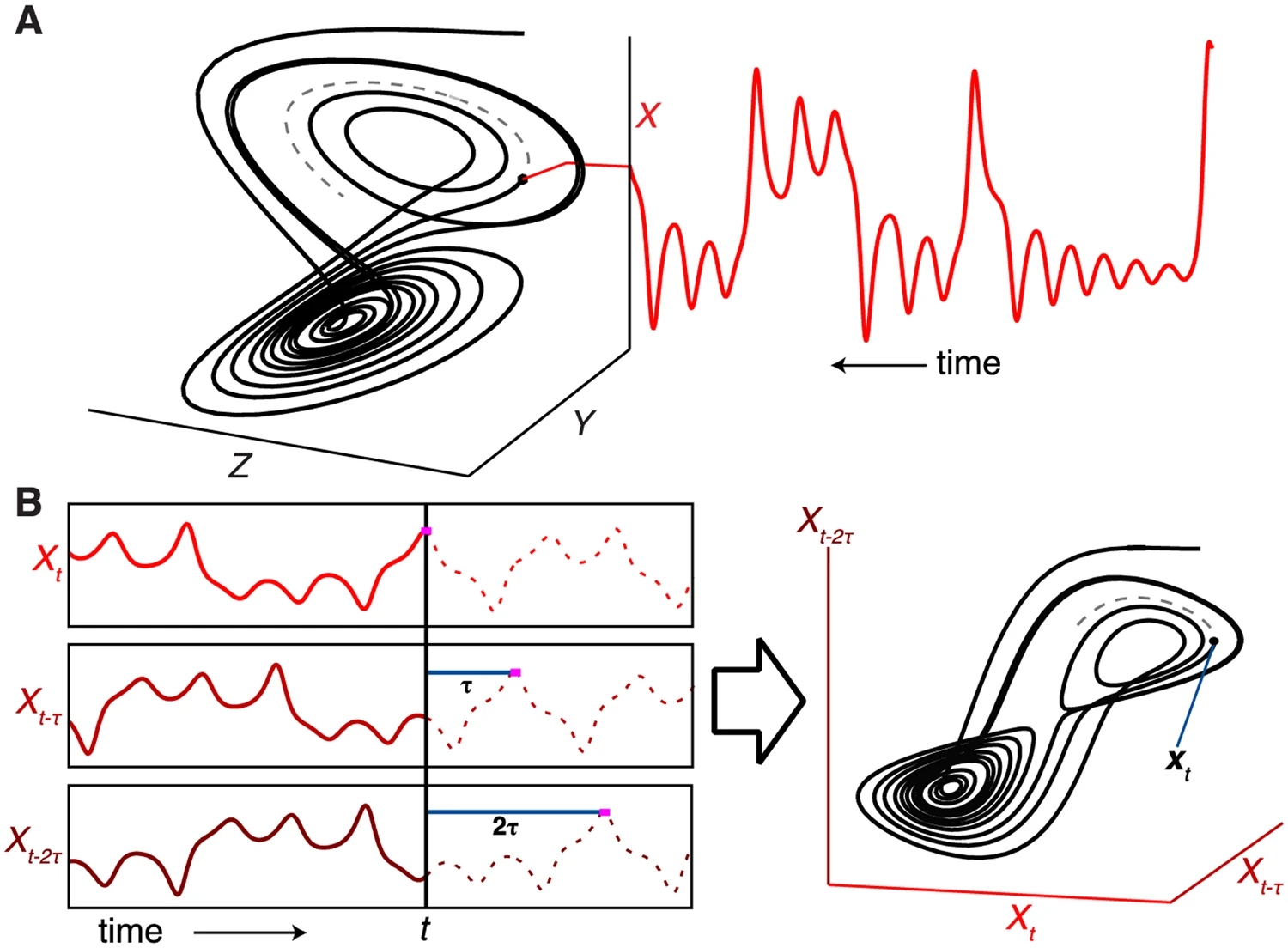
재구성된 어트랙터를 이용한 예측도 연구되고 있다.[32] 카오스에서는 고정밀 장기 예측은 원리적으로 불가능하지만, 그 행동은 결정론적으로 정해져 있으므로 단기 예측의 정확도 향상 가능성은 남아있다.[33] 재구성된 어트랙터를 응용한 이상 검출·모니터링 기술도 연구되고 있다.[34] 어트랙터의 구조는 시스템 변화에 반응하여 변화하기 때문에, 정상 상태와 이상 상태의 어트랙터를 준비해두고 현재 상태를 이것들과 비교하여 상태 감시를 수행한다.[35] 스프링[35], 볼트[36], 전동 베어링[37], 펌프[38] 등을 대상으로, 재구성된 어트랙터를 응용한 이상 검출 연구 사례가 있다.
참조
[1]
문서
[2]
웹사이트
Attractor
https://mathworld.wo[...]
2021-05-30
[3]
서적
Attractors for infinite-dimensional non-autonomous dynamical systems
Springer
[4]
서적
Nonlinear time series analysis
Cambridge university press
[5]
논문
On the concept of attractor
[6]
논문
Contact of Nominally Flat Surfaces
1966-12-06
[7]
서적
Surface Finish Metrology Tutorial
https://www.nist.gov[...]
U.S. Department of Commerce, National Institute of Standards (NIST)
[8]
논문
Chaos, Strange Attractors, and Fractal Basin Boundaries in Nonlinear Dynamics
[9]
논문
On the nature of turbulence
http://projecteuclid[...]
1971
[10]
논문
Stochastic climate dynamics: Random attractors and time-dependent invariant measures
[11]
논문
Medium-Term Prediction of Chaos
2006
[12]
간행물
Cubics, chaos and Newton's method
1997-11
[13]
간행물
Global Attractors in Partial Differential Equations
Elsevier
[14]
서적
リズム現象の世界
http://www.utp.or.jp[...]
東京大学出版会
[15]
서적
複雑系入門 ―知のフロンティアへの冒険
https://www.nttpub.c[...]
NTT出版
[16]
서적
マスペディア1000
https://d21.co.jp/bo[...]
ディスカヴァー・トゥエンティワン
[17]
논문
応用で学ぶカオスとフラクタルの基礎
電気学会
[18]
논문
物理化学系におけるパターンダイナミクスの数理 ―ギンツブルグ・ランダウ模型をめぐって
計測自動制御学会
[19]
서적
力学系・カオス ―非線形現象の幾何学的構成
https://www.kyoritsu[...]
共立出版
[20]
논문
ダイナミカルシステムとしての生物
日本生体医工学会
[21]
서적
鏡の伝説 ―カオス・フラクタル理論が自然を見る目を変えた
ダイヤモンド社
[22]
논문
A Minimal 2-d Quadratic Map With Quasi-periodic Route to Chaos
World Scientific Publishing Company
[23]
서적
カオス力学入門 ―古典力学からカオス力学へ
https://www.kindaika[...]
近代科学社
[24]
서적
カオス
http://www.asakura.c[...]
朝倉書店
[25]
서적
複雑系のカオス的シナリオ
朝倉書店
[26]
서적
フラクタル幾何学 上
https://www.chikumas[...]
筑摩書房
[27]
논문
精度保証付き数値計算の力学系への応用について(力学系の研究 : トポロジーと計算機による新展開)
https://hdl.handle.n[...]
京都大学数理解析研究所
2006-04
[28]
서적
非線形力学の展望II ―複雑さと構造
https://www.kyoritsu[...]
共立出版
[29]
서적
フラクタルの美 ―複素力学系のイメージ
シュプリンガー・フェアラーク東京
[30]
논문
リドル・ベイスンの多重フラクタル構造
日本学術会議メカニクス·構造研究連絡委員会
[31]
논문
Circularity in fisheries data weakens real world prediction
https://doi.org/10.1[...]
[32]
논문
力学系の埋め込み定理と時系列データからのアトラクタ再構成
日本応用数理学会
[33]
논문
Takensの埋め込み定理
日本知能情報ファジィ学会
[34]
서적
信号解析 ―信号処理とデータ分析の基礎
https://www.morikita[...]
森北出版
[35]
서적
カオス的世界像 ―非定形の理論から複雑系の科学へ
http://www.hakuyo-sh[...]
白揚社
[36]
논문
鋼橋の高力ボルト軸力診断へのカオス理論の適用に関する研究
土木学会
[37]
논문
カオス時系列解析を用いた転がり軸受の異常診断
日本機械学会
[38]
논문
ポンプ異常検出に対する信号解析法の検討
化学工学会
[39]
논문
Economy, Movement Dynamics, and Muscle Activity of Human Walking at Different Speeds
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com