로지스틱 사상
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
로지스틱 사상은 생물 개체 수 변동을 모델링하는 데 사용되는 이산 방정식으로, 로지스틱 방정식의 이산화 형태이다. 이 사상은 초기 조건과 매개변수 값에 따라 기하급수적 증가, 감소, 또는 과밀도로 인한 급격한 감소를 보이며, 동역학계의 궤도를 생성한다. 매개변수 값에 따라 주기 배가 분기, 혼돈 현상을 보이며, 특히 파라미터 값이 약 3.56995를 넘어서면 카오스적인 거동을 나타낸다. 로지스틱 사상은 다양한 분기 유형과 보편성을 가지며, 의사 난수 생성, 복소수 확장, 시간 지연, 결합 사상계, 및 생물학적 모델링 등 다양한 분야에 응용된다.
더 읽어볼만한 페이지
- 혼돈 이론 - 창발
창발은 부분에는 없던 성질이 전체에서 나타나는 현상으로, 철학적으로는 요소의 속성으로 설명할 수 없는 체계의 특징을 의미하며, 복잡계 과학, 생명 현상 등 다양한 분야에서 중요한 개념으로 다뤄진다. - 혼돈 이론 - 난류 (역학)
난류는 유체의 불규칙하고 무작위적인 운동 상태로, 일상생활과 공학 등 다양한 분야에서 관찰되며 여러 특징을 설명하기 위한 연구가 진행 중이다. - 인구 - 창씨개명
창씨개명은 일제강점기 조선총독부가 내선일체를 명분으로 조선인의 성과 이름을 일본식으로 바꾸도록 강요한 황국신민화 정책으로, 천황 중심의 국가 체계에 통합하려는 목적을 가졌다. - 인구 - 사망률
사망률은 특정 기간 동안의 사망자 수를 인구 집단 크기로 나눈 비율로, 인구 집단의 건강 상태와 사회 경제적 수준을 나타내는 지표이며, 역학 연구, 세계 보건 동향 분석 등에 활용된다. - 집단생태학 - 인구
인구는 특정 지역 또는 국가에 거주하는 사람들의 총수를 의미하며, 출산율, 사망률, 이주 등의 요인에 따라 시대별로 변화하면서 현재 지속적인 증가 추세를 보이고 있고, 경제, 사회, 환경 등 다양한 측면에 영향을 미친다. - 집단생태학 - 인구 밀도
인구 밀도는 특정 지역의 인구수를 면적으로 나눈 값으로, 인구 분포와 과밀 정도를 나타내는 지표이며, 다양한 계산 방법과 함께 도시 계획, 환경 관리 등 여러 분야에서 활용되고, 높거나 낮은 밀도는 사회·경제적 문제를 일으킬 수 있다.
| 로지스틱 사상 | |
|---|---|
| 개요 | |
| 종류 | 이산 동역학계 |
| 정의 방정식 | x_{n+1} = rx_n(1 − x_n) |
| 매개변수 | r |
| 변수 | x_n |
| 차원 | 1차원 |
| 거동 | 카오스 |
| 역사 | |
| 최초 발견 | 페카 뮈르베리(1958) |
| 대중화 | 로버트 메이(1976) |
2. 정의
로지스틱 사상은 임의의 실수 매개변수 에 대하여 다음과 같은 함수로 정의된다.
:
:
이는 다음과 같이 이산 시간 동역학계로 생각할 수 있다.
:
여기서 r은 매개변수, x는 변수이다. 이 식은 로지스틱 미분 방정식의 이산 버전이다.[33]
매개변수 r 값을 정하고 초기 조건 에서 계산을 시작하면, 시간 흐름에 따른 시스템 변화를 나타내는 수열 , , , ....을 얻을 수 있다. 동역학계에서 이 수열은 궤도라고 불리며, 매개변수 값에 따라 궤도는 단일 값으로 수렴, 주기적 반복, 비주기적 변동(카오스) 등 다양한 양상을 보인다.[4][22]
로지스틱 사상은 초기 상태 에 함수 를 반복 적용하여 나타낼 수 있다.
:
이는 앙리 푸앵카레가 고정점 연구에서 시작한 동역학계 및 카오스 연구의 초기 접근 방식이다. 만델브로 집합과 같은 많은 카오스 시스템은 로지스틱 사상처럼 간단한 2차 비선형 함수의 반복에서 나타난다.[5] 로지스틱 사상은 주기적 해와 혼돈적 해를 모두 나타내는 반면, 로지스틱 상미분 방정식은 S자형 시그모이드 함수와 같은 규칙적인 해를 보인다.[33]
간단히 말해, 로지스틱 사상은 다음과 같은 2차 함수이다.
:
여기서 는 상수(파라미터)이다. 대신 , , 를 파라미터 기호로 사용하기도 한다.
위 식에서 상수 와 변수 값을 정하고 를 계산한다. 얻어진 값을 새로운 값으로 식에 대입하여 반복 계산한다. 예를 들어, 를 2, 최초 를 0.01로 설정하고 5회 반복 계산하면 다음과 같다.
| 계산 횟수 | 입력하는 x의 값 | y = 2x(1 − x)의 계산 결과 |
|---|---|---|
| 1 | 0.01 | 2 × 0.01 × (1 − 0.01) = 0.0198 |
| 2 | 0.0198 | 2 × 0.0198 × (1 − 0.0198) = 0.03881592 |
| 3 | 0.03881592 | 2 × 0.03881592 × (1 − 0.03881592) = 0.0746184887 |
| 4 | 0.0746184887 | 2 × 0.0746184887 × (1 − 0.0746184887) = 0.1381011397 |
| 5 | 0.1381011397 | 2 × 0.1381011397 × (1 − 0.1381011397) = 0.2380584298 |
로지스틱 사상은 중학교 수준의 2차 함수이며, 계산기나 컴퓨터 스프레드시트를 이용해 쉽게 반복 계산할 수 있다. 로지스틱 사상은 점화식 또는 차분 방정식 형식으로 다음과 같이 나타낼 수 있다.
:
값을 정하면, 이 차분 방정식에 따라 , , ...가 순차적으로 계산된다. 이러한 수열을 만드는 차분 방정식을 역학계라고도 한다. 역학계는 시간과 함께 상태가 변화하는 시스템으로, 현재 상태가 정해지면 그 이후 상태도 유일하게 결정되는 시스템을 말한다. 위 식과 같은 형식으로 정의되는 역학계는 이산 역학계라고 불린다.
역학계 관점에서 변수 의 아래 첨자 은 시각 또는 시간을 의미한다. 수열의 첫 값 은 초기값, 변수의 시간 변화는 거동이라고 불린다.
로지스틱 사상은 생물 개체 수 변화 모델로 사용될 수 있다. (자세한 내용은 하위 섹션 '집단생체학적 해석' 참조) 이 경우 은 특정 세대 생물 개체 수를 최대 생식 개체 수로 나눈 값이다. 차분 방정식은 세대 개체 수에서 세대 개체 수를 계산하는 모델이다. 개체 수 증가 속도가 감소하는 효과는 항으로 표현된다.
'사상'은 집합의 요소를 다른 집합 요소에 대응시키는 규칙이다. 함수와 유사하지만, 함수를 수 외 집합까지 확장한 개념이다.[39] 로지스틱 사상은 실수를 실수에 대응시키는 규칙이다. '함수'와 '사상'은 엄밀히 구분되지 않으며, 분야별 관습에 따라 사용된다.[40] 역학계에서는 차분 방정식을 사상으로 파악하는 경우가 많다.
로지스틱 사상은 다음과 같이 표현할 수 있다.
:
또는
:
사상이 파라미터 에 의존함을 명확히 하기 위해 다음과 같이 표현하기도 한다.
:
위 식들은 와 실질적으로 동일하며, 시각 을 생략할 수 있어 편리하다.
이산 역학계 수열 , , ...는 사상 를 반복 적용하여 생성된다.
:
사상 반복은 다음과 같이 표기한다.
:
는 에 대한 의 회 반복을 의미한다. 차분 방정식 또는 사상 반복에서 생성되는 수열
:
또는
:
을 역학계에서는 궤도라고 한다. 역학계는 주어진 역학계 궤도의 거동을 연구한다.[41]
입력과 출력이 비례 관계인 시스템은 선형, 그렇지 않은 시스템은 비선형이다. 로지스틱 사상은 가장 단순한 비선형 함수인 2차 함수로 정의된다. 로지스틱 사상은 간단한 식이지만 복잡한 거동을 보이며, 2차 함수 반복 계산은 풍부한 수학 이론을 야기한다. 로지스틱 사상은 카오스 현상을 보이며, 카오스 입문 소재로 유용하다.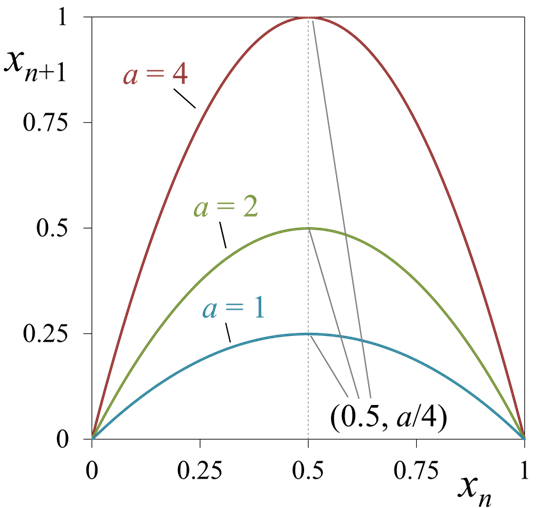
로지스틱 사상은 생물 개체 수 변동 모델이므로, 변수 는 범위로 제한된다. 변수 범위를 로 제한하면, 파라미터 는 부터 까지 ()로 제한된다. 이면 이 1을 초과할 수 있고, 가 음수이면 가 음수가 된다.[43]
사상 그래프는 거동 이해에 유용하다. 로지스틱 사상 그래프는 가로축 , 세로축 에 대한 과 관계 곡선이다. 로지스틱 사상 그래프는 을 제외하고
:
를 꼭짓점으로 하는 포물선이다. 변화에 따라 꼭짓점이 상하로 움직이며 포물선 형태가 변한다. 로지스틱 사상 포물선은 가로축( 직선)과 두 점 (0, 0), (1, 0)에서 교차하며, 교점 위치는 값에 영향을 받지 않는다.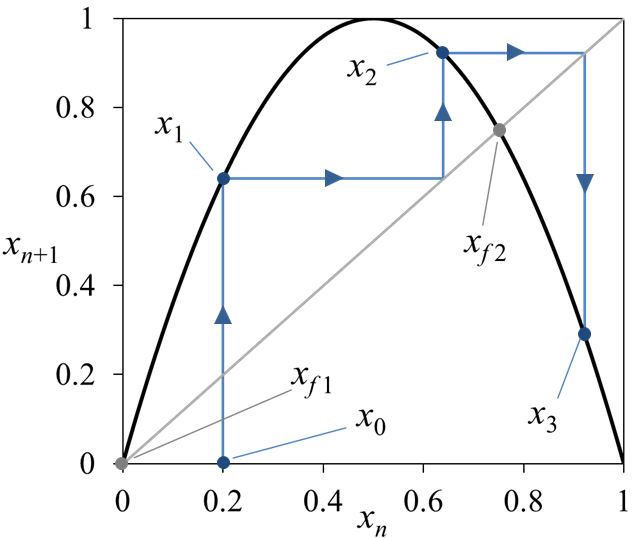
사상 그래프는 고정점 도식화에 유용하다. 그래프에 직선(45° 직선)을 그으면, 교점이 고정점이다. 고정점은
:
를 만족하며, 사상 적용에도 변하지 않는 점이다. 고정점을 로 표기하면, 로지스틱 사상 고정점은 를 풀어
:
:
두 점이다 ( 제외). 고정점은 이산 역학계에서 중요 개념이다.
거미집 그림은 1변수 사상 그래프에 사용 가능한 기법이다. 가로축에 초기값 설정 후, 곡선까지 세로선, 직선까지 가로선, 다시 곡선까지 세로선을 반복하면 거미집 모양 그림이 나타난다. 이 작도는 궤도 계산과 같으며, 거미집 그림은 에서 출발하는 궤도를 나타낸다. 이 기법으로 궤도 거동을 파악할 수 있다.
2. 1. 집단생체학적 해석
로지스틱 사상은 로지스틱 방정식을 이산화한 것으로, 다음 함수로 나타낼 수 있다.:
여기서 x는 n번째 세대의 개체 수와 최대 개체 수의 비를 나타내며, r은 매개 변수로 개체 수 증가율을 조절한다.
:
로지스틱 사상은 다음과 같은 성질을 갖는 이산 시간 동역학계로 생각할 수 있다.
:
- 개체 수가 매우 적을 때 (), r 값에 따라 개체 수는 기하급수적으로 증가하거나 () 감소한다 (
- 개체 수가 최댓값 ()에 가까울 때, 과밀도로 인해 개체 수는 급격히 감소한다.
이는 개체 수가 r배 증가하지만, 과밀도로 인해 만큼 사망하는 것을 의미한다.
로지스틱 사상을 개체 수 모형으로 사용할 때는 초기 조건 , 매개변수 범위를 벗어나면 개체 수가 음수가 되는 문제가 발생한다.
생물학적 개체군 모델에서 x는 기존 개체군과 최대 가능 개체군의 비율을 나타내는 0과 1 사이의 숫자이다.
이 비선형 차분 방정식은 다음 두 가지 효과를 나타낸다.
- 번식: 개체군 크기가 작을 때 현재 개체수에 비례하는 속도로 증가한다.
- 기아(밀도 의존적 사망률): 개체군 성장률은 환경의 이론적 "수용력"에서 현재 개체수를 뺀 값에 비례하는 속도로 감소한다.
일반적으로 매개변수 r은 [0, 4] 간격에 속하며, x는 [0, 1]에서 제한된다.
로지스틱 사상은 카오스 이론에서 중요한 역할을 하며, 초기 조건에 민감하게 반응하는 카오스 현상을 보여준다.[4][22]
3. 성질
r에 따라 로지스틱 사상은 다음과 같은 성질을 보인다.
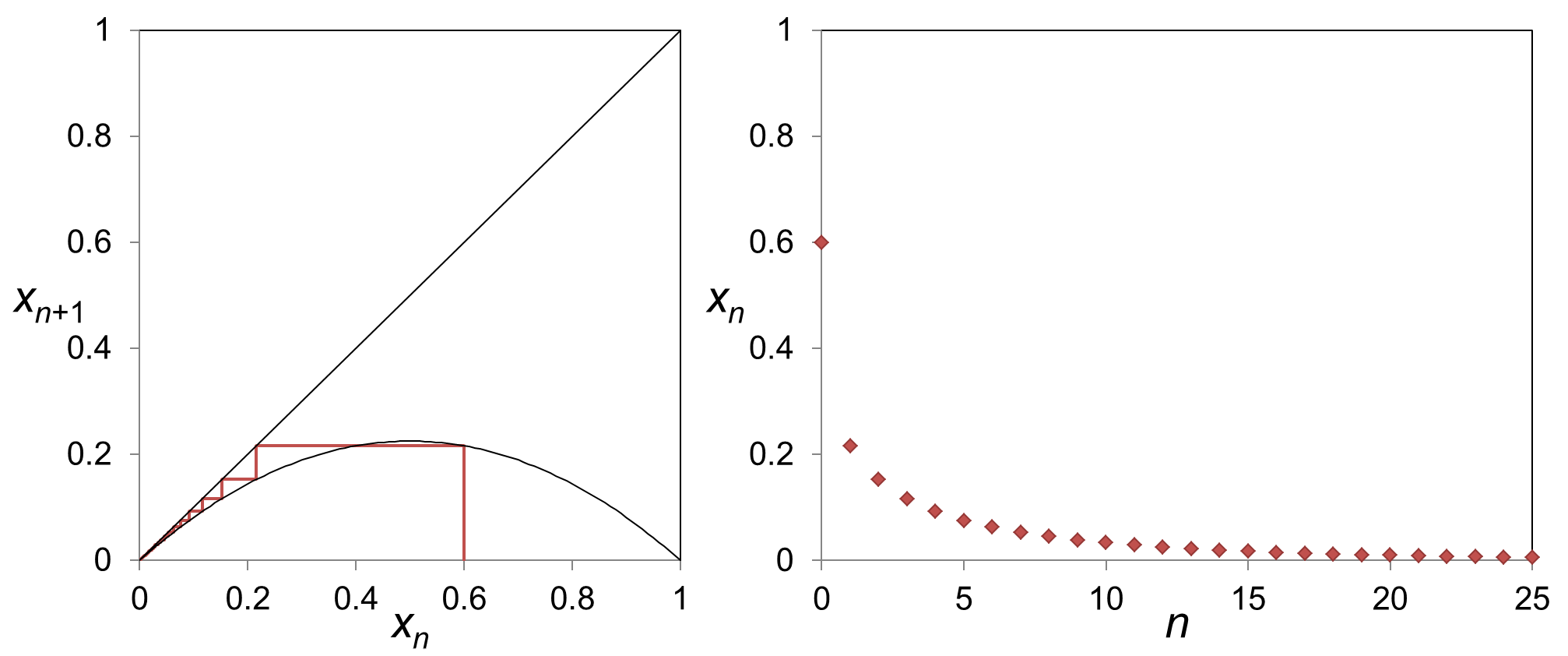
- 일 경우, 는 0으로 수렴한다.
- 일 경우, 는 로 수렴하며, 수렴 속도는 선형이다. 이 가운데 인 경우는 해석적으로 풀 수 있다.
- 일 경우 는 으로 수렴하지만, 수렴하는 속도는 매우 느리다.
- 일 경우, 대부분의 값들은 혼돈을 보인다. 거의 모든 초기 조건은 무한한 주기를 가진다.
- 다만, 이 구간에서도 일부 값은 혼돈을 보이지 않을 수 있다. 예를 들어, 부터 시작하는 작은 구간에서는 거의 모든 초기 조건은 주기 3의 주기점으로 수렴한다. 이보다 가 더 커지면 주기는 6, 12, 24 등으로 증가(주기배가 분기)하여, 결국 다시 혼돈 현상을 보이게 된다.
- 인 경우는 혼돈적이지만, 해석적으로 풀 수 있다.
- 일 경우, 거의 모든 초기 조건은 로 발산한다.
임의의 값에 대하여, 안정적인 주기적 궤도는 0개 또는 1개밖에 없다. 만약 안정적인 주기적 궤도가 존재한다면, 거의 모든 초기 조건은 이 궤도로 수렴한다.
이 애니메이션은 매개변수 r의 다양한 값에 대한 시퀀스 의 동작을 보여준다. 처음 4개는 표준 선형 시스템에서도 사용할 수 있으며, 두 값 사이의 진동은 공진 조건에서도 가능하다. 반면에 다른 것들은 혼돈에 특이하며, 난류의 시작과 유사하다. 또한 혼돈은 비선형성에만 특이한 것이 아니라 무한 차원 선형 시스템도 혼돈을 나타낼 수 있다는 점을 기억해야 한다.
3. 1. r 값에 따른 변화
Logistic map영어에서 r 값에 따른 변화는 다음과 같다.- 0 < r ≤ 1: 모든 초기 조건에 대해 개체 수는 결국 0으로 수렴하여 멸종한다. 이는 r이 1보다 작을 때, 개체 수가 기하급수적으로 감소하기 때문이다.
- 1 < r ≤ 3: 개체 수는 초기 값에 관계없이 1 - 1/r로 수렴한다. r = 2인 경우는 해석적으로 풀 수 있다. r = 3인 경우는 수렴 속도가 매우 느리다.
- 3 < r < 1+√6 ≈ 3.44949: 거의 모든 초기 조건에서 주기 2의 주기점에 도달하여 두 값을 번갈아 진동한다.
- 1+√6 < r < 3.54409...: 거의 모든 초기 조건에서 주기 4의 주기점에 도달한다.
- 3.54409... < r < 3.56995...: r이 증가하면서 거의 모든 초기 조건에서 주기 2n의 주기점에 도달한다. 주기는 r이 증가하면서 두 배씩 증가(주기배가 분기)하며, 주기가 일정한 r의 구간 길이는 제1종 파이겐바움 상수 δ ≈ 4.669201609의 역수로 기하급수적으로 감소한다.
- 3.56995... ≤ r < 4: 대부분의 r 값에서 혼돈 현상이 발생하여 거의 모든 초기 조건에서 무한 주기를 가진다. 그러나 이 구간에서도 일부 r 값은 혼돈을 보이지 않고 안정된 주기 궤도를 가진다. 예를 들어 r = 1 + √8부터 시작하는 작은 구간에서는 거의 모든 초기 조건이 주기 3의 주기점으로 수렴한다.
- r = 4: 혼돈 현상이 발생하지만 해석적으로 풀 수 있다.
- r > 4: 거의 모든 초기 조건에서 개체 수는 ±∞로 발산한다.
임의의 r 값에 대해 안정적인 주기적 궤도는 0개 또는 1개뿐이다. 안정적인 주기적 궤도가 존재하면 거의 모든 초기 조건은 이 궤도로 수렴한다.
위 애니메이션은 r 값에 따른 궤도의 변화를 보여준다. 시퀀스가 발산하지 않고 유한하게 유지되며, 시간에 따라 다음과 같은 현상을 볼 수 있다.
- 0으로의 지수적 수렴
- 고정 값으로의 수렴
- 초기 진동 후 수렴
- 두 값 사이의 안정적인 진동
- 2, 4, 8, 16 등 2의 배수인 값 집합 사이의 증가하는 진동
- 간헐성 (혼돈의 시작에서 진동의 싹)
- 완전히 발달된 혼돈 진동
- 위상 혼합 (진동이 사용 가능한 전체 공간을 덮는 경향)
처음 4개는 표준 선형 시스템에서도 가능하며, 두 값 사이의 진동은 공진 조건에서도 가능하다. 그러나 나머지는 혼돈에 특이하며, 난류의 시작과 유사하다.
로지스틱 사상은 개체수 변동 모델로 사용될 수 있으며, 변수 x는 유기체의 개체수를 최대 개체수로 나눈 값이므로 x의 가능한 값은 0 ≤ x ≤ 1로 제한된다.[6] 변수 범위를 [0, 1]로 제한하면 파라미터 r의 범위는 0 ≤ r ≤ 4로 제한된다. r > 4이면 xn+1의 값이 1을 초과할 수 있고, r이 음수이면 x가 음수 값을 가질 수 있다.[4]
사상의 그래프는 동작을 이해하는 데 중요하다. 그래프에 y = x (45° 선)를 그리면, 이 선과 그래프의 교차점이 고정점이다. 로지스틱 사상의 고정점은 rx(1 - x) = x를 풀어서 얻으며, xf1 = 0과 xf2 = 1 - 1/r (r = 0 제외)이다.
거미집 그림은 궤적을 그래픽으로 계산하는 기법이다. 초기값 x0에서 f(x) 곡선까지 수직선을 그리고, f(x) 곡선이 y = x의 45° 선과 만나는 지점에서 수평선을 그리는 과정을 반복하여 거미집 또는 계단 모양의 다이어그램을 생성한다.
Image:Logistic map animation.gif
r 값을 변경하면 다음과 같은 동작이 관찰된다.
r = 0일 때, 초기값 x0에 관계없이 x1 = 0이다. 0 < r < 1일 때, xn은 단조 감소하여 0으로 수렴한다.[7] 수렴하는 점은 고정점 xf1이다. 이 고정점은 점근 안정, 안정 또는 매력적이라고 불린다. 반대로 xf 주변의 궤도가 xf에서 멀어지면 고정점 xf는 불안정 또는 반발적이다.[8]
고정점이 점근적으로 안정적인지 확인하는 방법은 맵 f의 도함수를 구하는 것이다.[9] xf에서 |f'(xf)| < 1이면 점근적으로 안정하다.

로지스틱 맵의 도함수는 f'(x) = r(1 - 2x)이므로, x = 0이고 0 < r < 1일 때 0 < f'(0) < 1이므로 고정점 xf1 = 0은 점근 안정하다.
r < 1의 경우 고정점 xf가 불안정하려면 |f'(xf)| > 1이어야 한다. 0 < r < 1 범위에서 다른 고정점 xf2 = 1 - 1/a는 음수이므로 [0, 1] 범위에 속하지 않지만 불안정한 고정점으로 존재한다.
1과 2 사이의 r의 경우, 개체군은 초기 개체수와 관계없이 r - 1/r 값에 빠르게 접근한다.
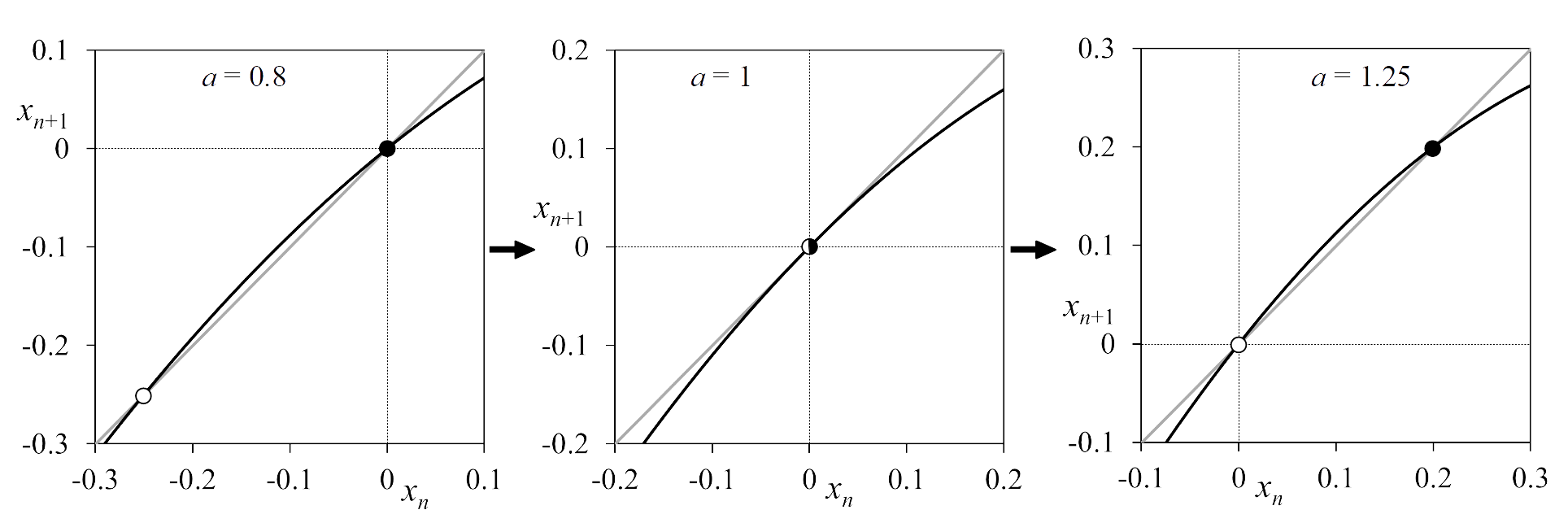
thumb 로지스틱 맵의 r = 1에서 발생하는 현상. r < 1인 경우, xf2는 [0, 1] 외부에서 불안정한 고정점으로 존재하지만, r = 1인 경우 두 고정점이 충돌하고, r > 1인 경우 xf2는 [0, 1] 사이에 안정적인 고정점으로 나타난다.]]
r = 1일 때, 로지스틱 맵의 궤적은 0으로 수렴하지만, r = 1에서 수렴 속도가 느리다. r = 1에서의 고정점 0은 점근적으로 안정하지만, |f'(xf)| < 1을 만족하지 않는다.
r = 1을 그래프로 나타내면, 곡선은 x = 0에서 45° 대각선에 접한다. 0 < r < 1에서 음수 범위에 존재하는 고정점 xf2 = 1 - 1/r은 xf2 = 0이 된다. r이 증가함에 따라 xf2의 값은 0에 접근하고, r = 1에서 xf2는 xf1 = 0과 충돌한다. 이 충돌은 전전이 분기를 발생시킨다.
분기의 결과로, 로지스틱 맵의 궤도는 xf1 = 0 대신 극한점 xf2 = 1 - 1/r로 수렴한다. 1 < r ≤ 2인 경우, 0과 1을 제외한 구간 (0, 1)의 값 x0에서 시작하는 궤적은 단조 증가 또는 감소하여 xf2로 수렴한다.
r이 2와 3 사이에 있을 때, 개체수는 결국 같은 값 r - 1/r에 접근하지만, 먼저 그 값을 중심으로 얼마 동안 변동한다. 수렴 속도는 선형이며, r = 3일 때는 극적으로 느리다.
2 < r < 3일 때, 초기값 0과 1을 제외하고 고정점 xf2 = 1 - 1/r은 1 < r ≤ 2일 때와 같다. 그러나 수렴은 단조적이지 않다. 변수가 xf2에 접근함에 따라, xf2보다 커졌다 작아졌다를 반복하며, xf2 주위를 진동하는 수렴 궤적을 따른다.
thumb xf1 = 0을 나타내고, 빨간색 선은 고정점 xf2 = 1 - 1/r을 나타낸다.]]
r이 3과 1 + √6 ≈ 3.44949 사이일 때, 개체수는 두 값 사이에서 영구적인 진동에 접근한다. 이 두 값은 r에 의존하며 x± = 1/2r(r + 1 ± √(r - 3)(r + 1))이다.[18]
r = 3일 때, 궤도는 고정점 xf2 = 1 - 1/r도 가진다. 그러나 변수는 2 < r < 3일 때보다 더 느리게 수렴한다. r = 3일 때, 도함수 f'(xf2)는 -1에 도달하고 |f'(xf)| < 1을 만족하지 않는다. r이 3을 초과하면 f'(xf2) < -1이 되고 xf2는 불안정한 고정점이 된다. r = 3에서 주기 배증 분기가 발생한다.
r > 3의 경우, 궤도는 더 이상 단일 점으로 수렴하지 않고, 충분한 시간이 지난 후에도 큰 값과 작은 값 사이를 번갈아 가며 움직인다. 예를 들어 r = 3.3의 경우, 변수는 0.4794...와 0.8236... 사이를 번갈아 가며 움직인다.
같은 값을 주기적으로 반복하는 궤도를 주기 궤도라고 한다. n → ∞일 때 변수의 최종 동작은 두 주기를 갖는 주기 궤도이다. 주기 궤도를 구성하는 각 값을 주기점이라고 한다. a = 3.3인 예에서 0.4794...와 0.8236...은 주기점이다. 두 주기점의 경우 x에 맵을 두 번 적용하면 원래 상태로 돌아가므로 f(f(x)) = f2(x) = x이다.
이 방정식에 로지스틱 맵 방정식을 적용하면 r2x(1 - x)(1 - ax(1 - x)) = x라는 4차 방정식이 얻어진다. 이 방정식의 해는 주기점이다. 두 개의 고정점 xf1 = 0과 xf2 = 1 - 1/a도 이 방정식을 만족한다. 따라서 나머지 두 해는 2주기점이다. 2주기점을 각각 x(2)f1과 x(2)f2로 나타내면, x(2)f1, x(2)f2 = r + 1 ± √(r + 1)(r - 3) / 2r이다.
주기점의 안정성에 대한 이론은 고정점과 유사하다. 맵의 k번 반복 후 fk(x)를 고려한다. (fk)'(x)를 k-주기점 x(k)f의 도함수 dfk(x)/dx라고 한다. x(k)f가 |(fk)'(x(k)f)| < 1을 만족하면 x(k)f는 점근적으로 안정적이다. |(fk)'(x(k)f)| > 1이면 x(k)f는 불안정하다.
주기점의 안정성에 대한 논의는 그래프를 그려 쉽게 이해할 수 있다. 가로축은 xn이고 세로축은 xn+2이며, xn+2와 xn의 관계를 보여주는 곡선이 그려져 있다. 이 곡선과 45° 선의 교차점은 고정점과 2주기점을 나타낸다. 로지스틱 맵 f2(x)의 그래프를 그리면, 고정점 xf2에서의 접선의 기울기가 경계 r = 3에서 1을 초과하여 불안정해지는 것을 관찰할 수 있다. 동시에 두 개의 새로운 교차점이 나타나는데, 이는 주기점 x(2)f1과 x(2)f2이다.
로지스틱 맵에 대해 두 주기점의 미분 계수를 계산하면 (f2)'(x(2)f) = 4 + 2r - r2이다. 이를 |(fk)'(x(k)f)| < 1에 적용하면, 매개변수 a는 |4 + 2r - r2| < 1이다. 이 범위가 3 < r < 1 + √6일 때, 즉 r이 1 + √6 = 3.44949...을 초과할 때 2주기점은 점근적으로 안정적이며, 2주기점의 동작이 변경된다.
[0, 1]의 거의 모든 초기 값은 2주기점에 끌리지만, xf1 = 0과 xf2 = 1 - 1/a는 [0, 1]에서 불안정한 고정점으로 남아 있다.
- r이 3.44949에서 3.54409 사이(근사적으로)일 때, 거의 모든 초기 조건에서 개체수는 네 값 사이에서 영구적인 진동에 접근한다.
- r이 3.54409를 넘어서 증가하면, 거의 모든 초기 조건에서 개체군은 8개의 값 사이에서 진동하다가 16개, 32개 등으로 접근하게 된다. 주어진 길이의 진동을 산출하는 매개변수 구간의 길이는 빠르게 감소하며, 두 연속적인 분기 구간 길이의 비율은 페이겐바움 상수 δ ≈ 4.66920에 접근한다. 이러한 현상은 주기 배가 연쇄의 한 예이다.
- r ≈ 3.56995에서 카오스의 시작점이다. 거의 모든 초기 조건에서 유한한 주기의 진동은 더 이상 보이지 않는다.
- 3.56995를 넘는 대부분의 r 값은 카오스적 거동을 보이지만, 비카오스적 거동을 보이는 특정 고립된 r 범위가 여전히 있다. 이것을 때때로 안정성의 섬이라고 부른다. 예를 들어 1 + √8 (약 3.82843)에서 시작하여 세 값 사이에서 진동을 보이는 매개변수 r의 범위가 있으며, 약간 더 높은 r 값에서는 6 값 사이, 다음으로 12 값 사이 등으로 진동한다.
- r = 1 + √8 = 3.8284...에서 안정적인 주기-3 사이클이 나타난다.[11]
- 매개변수 r이 약 3.56995에서 약 3.82843까지 변화함에 따라 로지스틱 시퀀스의 카오스적 거동의 전개를 때때로 Pomeau–Manneville 시나리오라고 부르며, 이는 비주기적 거동의 폭발에 의해 중단된 주기적(층류) 위상으로 특징지어진다.
- r = 4를 넘으면, 거의 모든 초기 값이 결국 구간 [0, 1]을 벗어나 발산한다. [0, 1] 안에 남아 있는 초기 조건 집합은 칸토어 집합을 형성하고 이 칸토어 집합으로 제한된 역학은 카오스적이다.[16]
r의 모든 값에 대해 최대 하나의 안정적인 사이클이 있다. 안정적인 사이클이 존재하면 거의 모든 점을 끌어들이는 전역적으로 안정적이다.[17] 어떤 주기의 안정적인 사이클이 있는 일부 r 값은 다양한 주기의 무한히 많은 불안정한 사이클을 갖는다.
thumb. 매개변수 r의 모든 값에 대한 끌개가 해당 r의 수직선에 표시됩니다.]]
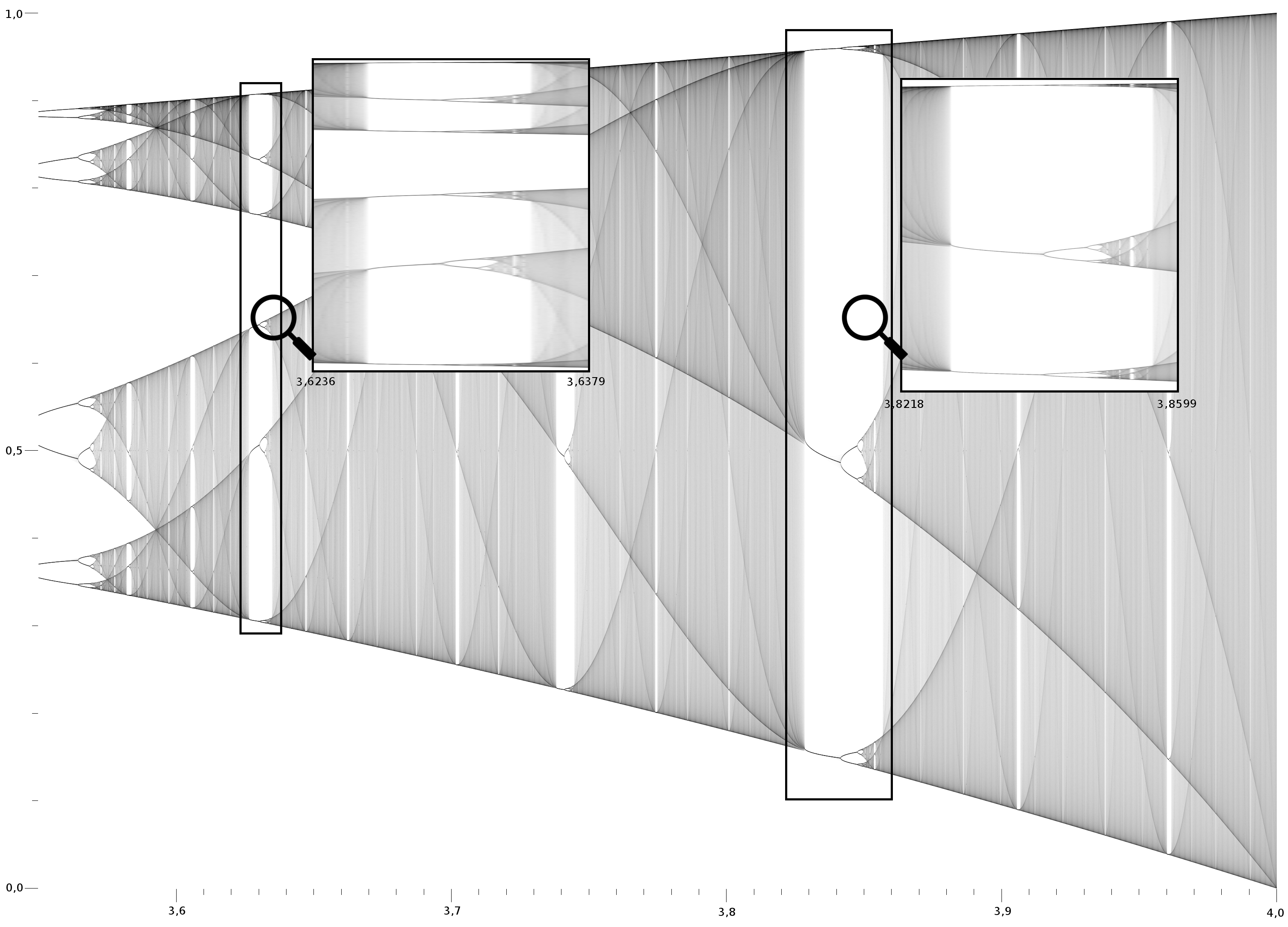
분기 다이어그램은 자기 유사하다. 위에서 언급한 r ≈ 3.82843 값을 확대하고 세 개의 팔 중 하나에 초점을 맞추면 인접한 상황이 전체 다이어그램의 축소되고 약간 왜곡된 버전처럼 보인다. 이것은 카오스와 프랙탈 사이의 깊고 보편적인 연결의 예이다.
음수 r 값도 고려할 수 있다.
- -2와 -1 사이의 r에 대해 로지스틱 시퀀스는 또한 카오스적 거동을 특징으로 한다.[18]
- r이 -1과 1 - √6 사이이고 x0이 1/r과 1 - 1/r 사이인 경우, 개체수는 3과 1 + √6 사이의 r의 경우와 동일한 공식으로 주어진 두 값 사이의 영구적인 진동에 접근한다.[18]
3. 2. 고정점과 주기점
로지스틱 사상은 일 때 다음 두 개의 고정점을 갖는다.집단생태학적으로 이는 멸종 상태이거나 평형 상태에 해당한다. 이 고정점은 의 값에 따라 안정할 수도, 불안정할 수도 있다.[6]
로지스틱 사상은 이면 다음과 같이 주기가 2인 주기적 궤도를 가진다.
:
로지스틱 사상의 그래프는 r = 0인 경우를 제외하고 꼭짓점이 인 포물선 형태를 띤다. r이 변경되면 꼭짓점이 위아래로 이동하고 포물선의 모양이 변한다. 또한, 로지스틱 사상의 포물선은 수평축(인 선)과 두 점 과 에서 교차하며, 이 교차점의 위치는 일정하고 r의 값에 의존하지 않는다.
사상의 그래프에 y = x(45° 선) 선을 그리면, 이 45° 선이 그래프와 교차하는 점이 고정점이다. 수학적으로 고정점은 를 만족하는, 사상을 적용해도 변하지 않는 점을 의미한다. 고정점을 로 표시할 때, 로지스틱 사상의 고정점은 를 풀어서 얻는다.
- (r = 0 제외)
고정점의 개념은 이산 역학계에서 매우 중요하다.
단일 변수 매핑에서 사용할 수 있는 또 다른 그래픽 기법은 거미집 투영이다. 수평축에서 초기 값 을 결정한 후, 초기 값 에서 f(x)의 곡선까지 수직선을 그린다. f(x)의 곡선이 y = x의 45° 선과 만나는 지점에서 수평선을 그리고, 다시 곡선이 45° 선과 만나는 지점에서 f(x)의 곡선까지 수직선을 그리는 과정을 반복하면 평면에 거미집 또는 계단 모양의 다이어그램이 생성된다.
3. 3. 해석적 해
인 경우, 로지스틱 사상의 해석적 해를 구할 수 있다.위 세 가지 해는 모두 다음과 같은 형태를 띤다.[47]
여기서 는 적절한 함수이고, 는 그 역함수이다.[47] 에서는 , 에서는 , 에서는 이다.[35] 그러나 임의의 에 대해 로지스틱 사상의 일반적인 해석적 해를 나타낼 수 있는 표준적인 함수 는 존재하지 않는다.[47]
4. 혼돈 (카오스)
값에 따라 로지스틱 사상은 다음과 같은 성질을 보인다.
- 일 경우, 대부분의 값은 혼돈을 보인다. 거의 모든 초기 조건은 무한한 주기를 갖는다. 다만, 이 구간에서도 일부 값은 혼돈을 보이지 않을 수 있다. 예를 들어, 부터 시작하는 작은 구간에서는 거의 모든 초기 조건이 주기 3의 주기점으로 수렴한다. (샤르코우스키 정리에 따라 이 경우 모든 주기의 주기점이 존재한다.) 이보다 가 더 커지면 주기는 6, 12, 24 등으로 증가(주기배가 분기)하여, 결국 다시 혼돈 현상을 보이게 된다.
- 인 경우는 혼돈적이지만, 해석적으로 풀 수 있다.
- 일 경우, 거의 모든 초기 조건은 로 발산한다.
임의의 값에 대하여, 안정적인 주기적 궤도는 0개 또는 1개뿐이다. 만약 안정적인 주기적 궤도가 존재한다면, 거의 모든 초기 조건은 이 궤도로 수렴한다. (일부 경우, 샤르코우스키 정리에 따라서 다른 불안정한 주기적 궤도의 존재를 유추할 수 있다.)
분기 다이어그램은 자기 유사성을 보인다. 위에서 언급한 값을 확대하고 세 개의 팔 중 하나에 초점을 맞추면, 그 주변은 전체 다이어그램의 축소되고 약간 왜곡된 버전처럼 보인다. 이는 다른 모든 비카오스적 점에도 동일하게 적용된다. 이것은 카오스와 프랙탈 사이의 깊고 보편적인 연결을 보여주는 예시이다.
thumb (에서 대부분 혼돈).]]

로지스틱 맵은 단순하면서도 혼돈의 개념을 잘 보여주는 예시이다. 혼돈계는 다음과 같은 특징을 갖는다.[19][20]
- 초기 조건 민감성: 초기 조건의 작은 변화가 큰 영향을 미칠 수 있다.
- 위상적 추이: 시스템이 유체 혼합처럼 사용 가능한 모든 상태를 점유하는 경향을 보인다.[21]
- 조밀한 주기 궤도를 갖는다.
4. 1. 혼돈의 시작
r영어 값이 약 3.56995를 넘어서면, 로지스틱 사상은 혼돈적 거동을 보인다. 즉, 초기 조건의 미세한 차이가 시간이 지남에 따라 극도로 커져, 장기적인 예측이 불가능해진다.[2] 초기 개체 수의 약간의 변화는 시간이 지남에 따라 극적으로 다른 결과를 초래하며, 이는 카오스의 주요 특징이다.[19][20]- 에서 는 주기 배가 폭포의 끝에서 카오스의 시작점이다. 거의 모든 초기 조건에서 유한한 주기의 진동은 더 이상 보이지 않는다.
- 이 숫자는 난류와 유사한 다른 카오스 현상의 시작을 위한 레이놀즈 수의 등가로 비교하고 이해해야 하며, 상전이의 임계 온도와 유사하다.
- 3.56995를 넘는 대부분의 값은 카오스적 거동을 보이지만, 비카오스적 거동을 보이는 특정 고립된 범위가 여전히 있다. 이것을 때때로 ''안정성의 섬''이라고 부른다.
- 매개변수 이 약 3.56995에서 약 3.82843까지 변화함에 따라 로지스틱 시퀀스의 카오스적 거동의 전개를 때때로 Pomeau–Manneville 시나리오라고 부르며, 이는 비주기적 거동의 폭발에 의해 중단된 주기적(층류) 위상으로 특징지어진다. 이러한 시나리오는 반도체 장치에 적용될 수 있다.[12]
- 에서 분기 다이어그램의 두 카오스적 밴드가 로지스틱 맵의 첫 번째 Misiurewicz point에서 교차한다. 이는 방정식을 만족한다.[15]
4. 2. 혼돈의 특징
로지스틱 사상은 초기 조건의 작은 변화가 결과에 큰 영향을 미치는 초기 조건 민감성, 즉 나비 효과를 보인다.[19][20] 이는 시스템이 정의된 공간에서 반복적으로 늘리고 접는 것을 나타내기 때문이다.[22] 로지스틱 맵의 경우, 이를 설명하는 이차 차분 방정식은 구간 (0, 1)에서 늘리고 접는 연산으로 생각할 수 있다.[22]이러한 늘리고 접는 과정은 반복적인 시퀀스의 점진적인 발산뿐만 아니라 지수적 발산(랴푸노프 지수 참조)도 생성하며, 이는 혼돈적인 로지스틱 맵의 복잡성과 예측 불가능성을 보여준다.[22] 반복적인 시퀀스의 지수적 발산은 혼돈과 예측 불가능성 사이의 연결을 설명한다. 즉, 시스템 초기 상태의 작은 오류는 이후 시스템 진화에서 큰 오류로 이어진다.[22] 따라서 초기 상태에 대한 지식에 아주 작은 오류가 있더라도 미래 상태에 대한 예측은 점차 (지수적으로) 악화된다.[22]
또한 로지스틱 사상은 시스템이 유체 혼합과 유사하게 사용 가능한 모든 상태를 점유하는 경향이 있는 위상적 추이성을 보인다.[21] 더불어 시스템은 조밀한 주기 궤도를 나타낸다.[2]
이러한 특징들은 앞서 언급한 바와 같이, 약 3.57과 4 사이의 대부분의 r 값에 대한 로지스틱 맵의 특징이다.[2]
4. 3. 랴푸노프 지수
랴푸노프 지수는 혼돈의 정도를 정량적으로 나타내는 지표이다. 양의 랴푸노프 지수는 초기 조건에 대한 민감성을 나타낸다.[19] 즉, 초기 조건의 작은 변화가 시간이 지남에 따라 큰 변화를 초래하는 현상이다.1차원 사상의 경우 랴푸노프 지수 ${\lambda}$는 다음과 같이 계산할 수 있다.[23]
${\displaystyle \lambda =\lim _{N\to \infty }{\frac {1}{N}}\sum _{i=0}^{N-1}\log \left|f'(x_{i})\right|}$
여기서 ${\log }$는 자연로그를 의미한다. ${\lambda }$는 두 궤도의 거리($}$와 $_{n}}$의 거리)가 지수 함수적으로 얼마나 빠르게 멀어지는지를 나타내는 지표이다. ${\lambda }$가 양수이면 초기값 민감성을 가지는 것이고, 0 또는 음수이면 초기값 민감성이 없는 것이다.[23] 로지스틱 사상의 ${\lambda }$를 수치적으로 계산하면, ${a
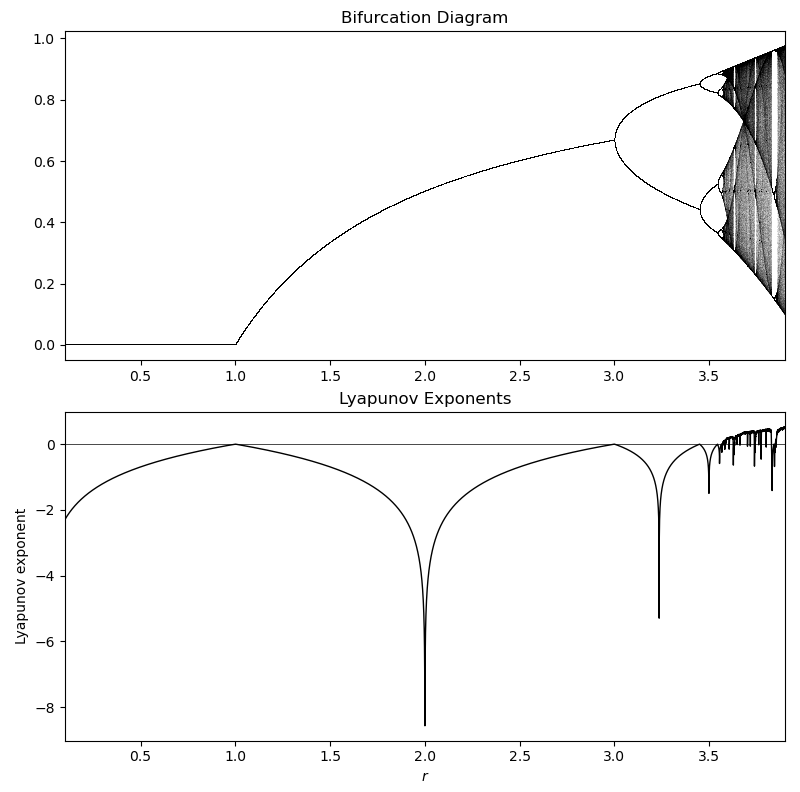
동적 시스템에 안정적인 사이클이 존재하는 각 간격 내에는 초안정 값이 존재한다. 이는 랴푸노프 지수 도표에서 날카로운 하강으로 확인할 수 있다.[23]
4. 4. 안정성의 섬
일 경우, 대부분의 값들은 혼돈을 보인다. 거의 모든 초기 조건은 무한한 주기를 가진다.[10] 다만, 이 구간에서도 일부 값은 혼돈을 보이지 않을 수 있는데, 예를 들어 부터 시작하는 작은 구간에서는 거의 모든 초기 조건은 주기 3의 주기점으로 수렴한다. (샤르코우스키 정리에 따라 이 경우 모든 주기의 주기점이 존재한다.) 이보다 가 더 커지면 주기는 6, 12, 24 등으로 증가(주기배가 분기)하여, 결국 다시 혼돈 현상을 보이게 된다.[10]3. 56995를 넘는 대부분의 값은 카오스적 거동을 보이지만, 비카오스적 거동을 보이는 특정 고립된 범위가 여전히 존재하는데, 이를 때때로 ''안정성의 섬''이라고 부른다. 예를 들어, [10] (약 3.82843)에서 시작하여 세 값 사이에서 진동을 보이는 매개변수 의 범위가 있으며, 약간 더 높은 값에서는 6 값 사이, 다음으로 12 값 사이 등에서 진동한다.[11]
5. 분기
로지스틱 사상에서 매개변수 값을 변경하면 시스템의 동작이 질적으로 변화하는 현상을 분기라고 한다. 값에 따라 로지스틱 사상은 다음과 같은 성질을 보인다.
- 일 경우, 는 0으로 수렴한다.
- 일 경우, 는 로 수렴하며, 수렴 속도는 선형이다. 이 가운데 인 경우는 해석적으로 풀 수 있다.
- 일 경우 는 으로 수렴하지만, 수렴하는 속도는 매우 느리다.
- 일 경우, 대부분의 값들은 혼돈을 보인다. 거의 모든 초기 조건은 무한한 주기를 가진다.
- 다만, 이 구간에서도 일부 값은 혼돈을 보이지 않을 수 있다. 예를 들어, 부터 시작하는 작은 구간에서는 거의 모든 초기 조건은 주기 3의 주기점으로 수렴한다. (다만, 샤르코우스키 정리에 따라 이 경우 모든 주기의 주기점이 존재한다.) 이보다 가 더 커지면 주기는 6, 12, 24 등으로 증가(주기배가 분기)하여, 결국 다시 혼돈 현상을 보이게 된다.
- 인 경우는 혼돈적이지만, 해석적으로 풀 수 있다.
- 일 경우, 거의 모든 초기 조건은 로 발산한다.
임의의 값에 대하여, 안정적인 주기적 궤도는 0개 또는 1개밖에 없다. 만약 안정적인 주기적 궤도가 존재한다면, 거의 모든 초기 조건은 이 궤도로 수렴한다.[17]
thumb
이 1과 2 사이일 때, 개체군은 초기 개체수와 관계없이 값에 빠르게 접근한다. 일 때는 전전이 분기가 발생한다.
thumb 로지스틱 맵의 r = 1에서 발생하는 현상]]
일 때, 궤적은 0으로 수렴하지만, 수렴 속도가 느리다. 에서의 고정점 0은 점근적으로 안정하지만, 2차 섭동에 의해 안정성이 결정된다. 을 그래프로 나타내면, 곡선은 에서 45° 대각선에 접한다.
이 2와 3 사이에 있을 때, 개체수는 결국 에 접근하지만, 먼저 그 값을 중심으로 얼마 동안 변동하며 수렴 속도는 선형이며, 일 때는 극적으로 느리다.
이 3과 사이일 때, 개체수는 두 값 사이에서 영구적인 진동에 접근한다. 이 두 값은 에 의존하며 이다.[18] 에서는 주기 배증 분기가 발생한다.
5. 1. 분기의 종류
Logistic map|로지스틱 사상영어에서는 매개변수 ''r''의 값에 따라 다양한 종류의 분기가 나타난다.- 전이 임계 분기(Transcritical bifurcation): ''r'' = 1에서 발생한다. 이 분기점에서, ''r'' < 1일 때 안정적이었던 고정점 0은 불안정해지고, 대신 ''r'' > 1일 때 고정점 이 안정적인 고정점으로 나타난다.[4] 즉, 고정점의 안정성이 서로 교환되는 현상이다.
- 주기 배증 분기(Period-doubling bifurcation): ''r'' = 3에서 발생한다.[4] ''r'' > 3이 되면, 궤도는 단일 고정점으로 수렴하지 않고, 두 값 사이를 주기적으로 진동하는 형태가 된다. 이 두 값을 2-주기점이라고 하며, 각각 과 로 나타낸다.[4] ''r'' 값이 증가함에 따라, 주기 4, 8, 16, ...의 궤도가 순차적으로 나타나는 주기 배증 분기가 계속해서 발생한다.
- 접선 분기(Tangent bifurcation): 카오스 영역에서 나타나며, 안정적인 주기 궤도가 생성되는 현상이다. 예를 들어, ''r'' = 1 + (약 3.82843) 근처에서 주기 3의 안정적인 궤도가 나타난다.[11] 이러한 현상은 간헐성 카오스와 관련이 있다.
- 내부/경계 크라이시스(Interior/Boundary crisis): 카오스 어트랙터의 크기가 급격하게 변하는 현상이다.
5. 2. 분기 다이어그램
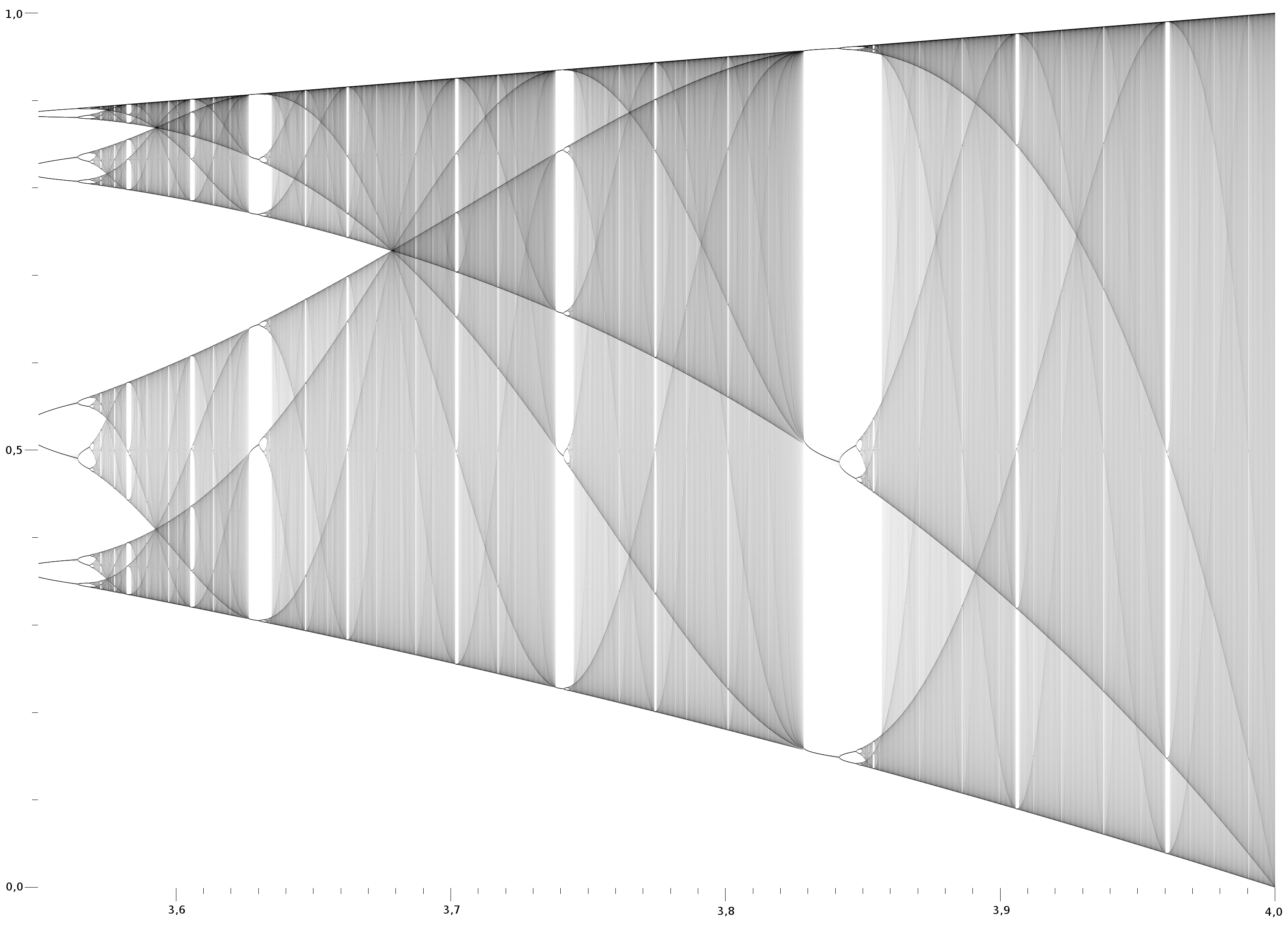
분기 다이어그램은 매개변수 r에 따른 로지스틱 사상의 궤도 변화를 시각적으로 나타낸 그림이다. 이 그림을 통해 주기배가 분기, 카오스, 안정성의 섬 등을 확인할 수 있다.- 주기 배증: r 값이 증가함에 따라 궤도는 주기 1, 주기 2, 주기 4, 주기 8 등 2의 거듭제곱 형태로 주기가 늘어나는 현상을 보인다. 이를 주기배가 분기라고 부른다.
- 카오스: r 값이 약 3.56995를 넘어서면 궤도는 불규칙하고 예측 불가능한 양상을 띠게 된다. 이를 카오스라고 한다.
- 안정성의 섬: 카오스 영역 사이사이에 특정 주기를 갖는 궤도가 나타나는 구간이 존재하는데, 이를 안정성의 섬이라고 한다. 예를 들어, r이 약 3.82843 근처에서는 주기 3 궤도가 나타난다.[10]
분기 다이어그램은 자기 유사적인 프랙탈 구조를 보인다. 즉, 특정 부분을 확대하면 전체 그림과 유사한 형태가 반복되는 것을 관찰할 수 있다. 이는 카오스와 프랙탈 사이의 깊은 연관성을 보여준다.
6. 보편성
로지스틱 사상에서 나타나는 주기 배증과 카오스로의 전이는 다른 비선형 함수에서도 유사하게 나타나는 현상이다. 이는 혼돈 이론에서 중요한 개념인 보편성의 한 예시이다.
- r ≈ 3.56995에서 주기 배가 폭포가 끝나고 카오스가 시작된다. 거의 모든 초기 조건에서 유한한 주기의 진동은 더 이상 보이지 않는다. 초기 조건의 미세한 변화는 시간이 지남에 따라 매우 다른 결과를 초래하는데, 이는 카오스의 주요 특징이다.[10]
- 3.56995를 넘는 대부분의 r 값은 카오스적 거동을 보이지만, 일부 구간에서는 비카오스적 거동을 보이기도 한다. 이를 '안정성의 섬'이라고 부른다. 예를 들어, 1 + (약 3.82843) 근처에서는 세 값 사이를 진동하는 r의 범위가 존재하며, r 값이 조금 더 커지면 6개의 값, 12개의 값 사이를 진동한다.[11]
- 에서는 안정적인 주기-3 순환이 나타난다.[11]
- 매개변수 r이 약 3.56995에서 3.82843까지 변화하면서 나타나는 로지스틱 수열의 카오스적 현상은 포모-마느빌 시나리오라고 불리기도 한다. 이는 비주기적인 움직임이 간헐적으로 나타나는 주기적인(층류) 위상으로 특징지어진다. 이 시나리오는 반도체 장치 등에 응용될 수 있다.[12]
- 모든 진동 주기는 특정 r 값에서 발생한다. '주기 배가 윈도우'는 일련의 하위 구간으로 구성된 r 값의 범위이다. k번째 하위 구간은 주기 의 안정적인 순환을 갖는 r 값을 포함한다. 이러한 하위 구간의 배열은 '고조파 폭포'라고 불린다.[13] 주기 의 안정적인 순환을 갖는 하위 구간은 모든 에 대해 주기 의 불안정한 순환을 갖는다. 하위 구간이 무한히 이어지는 끝에 있는 r 값을 고조파 폭포의 '누적점'이라고 한다. r이 증가함에 따라 서로 다른 c 값을 갖는 새로운 윈도우가 연속적으로 나타난다. 첫 번째 윈도우는 에 해당한다. 홀수 c를 포함하는 모든 후속 윈도우는 큰 c 값에서 시작하여 c가 감소하는 순서로 발생한다.[13][14]
- 에서 분기 다이어그램의 두 카오스 밴드는 로지스틱 맵의 첫 번째 미주레비치 점에서 교차한다. 이는 방정식을 만족한다.[15]
thumb. 매개변수 r의 각 값에 대한 끌개가 해당 r의 수직선에 표시.]]
분기 다이어그램은 자기 유사성을 보인다. 위에서 언급한 값을 확대하고 세 갈래 중 하나에 초점을 맞추면, 주변 상황은 전체 다이어그램을 축소하고 약간 왜곡한 것처럼 보인다. 이는 카오스와 프랙탈 사이의 깊고 보편적인 연결을 보여주는 예시이다.


카오스 지점 에서 의 곡선은 프랙탈처럼 보인다. 또한 주기 배증을 반복하면 그래프가 서로 유사해 보이지만 가운데로 축소되고 180도 회전한다.
이는 스케일링 극한을 시사한다. 함수를 반복해서 두 배로 늘린 다음 특정 상수 에 대해 만큼 확대하면 다음과 같다:
극한에서 를 만족하는 함수 가 나오게 된다. 이는 대부분의 주기 배증을 통한 카오스 경로에서 나타나는 페이겐바움 함수이며(따라서 이는 '''보편성'''의 한 예이다), 주기 배증 간격이 점점 짧아짐에 따라 두 주기 배증 간격 간의 비율은 극한, 즉 첫 번째 페이겐바움 상수 로 수렴한다.


이 에 접근하면, 주기가 3, 6, 12, ...인 또 다른 주기 배증이 일어나 카오스에 접근하는데, 이 역시 동일한 파이겐바움 상수 를 갖는다. 의 극한도 동일한 페이겐바움 함수이다. 이는 보편성의 한 예이다.

일반적으로 각 주기 곱셈 카오스로 가는 경로는 고유한 파이겐바움 상수 쌍을 갖는다. 주기-7중의 경우 최소 9개의 파이겐바움 상수 쌍이 존재한다.[4]
일반적으로 이며, 두 숫자가 무한대로 증가함에 따라 관계는 정확해진다. .
포물선 극댓값을 갖는 1차원 맵의 보편성과 페이겐바움 상수는 다음과 같다. , .[30][31]
6. 1. 단봉 사상
로지스틱 사상에서 나타나는 분기 패턴은 특정 사상에 국한되지 않고, 어떤 조건을 만족하는 사상에서 공통적으로 나타난다. 다음의 사인 함수를 사용한 역학계가 그 예시 중 하나이다.[49]:
여기서 정의역은 이고 이다.[49] 이 사인 사상은 로지스틱 사상과 정성적으로 동일한 거동을 보인다.[49] 즉, 파라미터 의 증가에 따라 주기 배가 루트를 거쳐 카오스가 되고, 카오스 영역에는 창이 존재한다.[49]
로지스틱 사상과 사인 사상은 모두 구간 을 로 사상하는 1차원 사상으로, '''단봉'''(unimodal)이라고 불리는 다음의 성질을 만족한다.[50]
# 을 만족한다.
# 사상은 미분 가능하며, 중에 을 만족하는 임계점 가 유일하게 존재한다.
일반적으로, 1파라미터 1변수의 어떤 1차원 사상이 단봉이고, 꼭지점 부근을 2차 다항식으로 근사할 수 있는 곡선이라면, 구체적인 사상의 형태에 의존하지 않고 파라미터 범위 에서 무한한 주기 배가 캐스케이드의 분기가 일어나며, 식 (3-13)에서 정의되는 비율 는 파이겐바움 상수 와 일치한다.[51][52][53][54]
또한, 로지스틱 사상에서 나타난 안정 주기 궤도의 출현 패턴에도 보편성이 있다.[55] 파라미터를 로 하고, 으로 표현되는 단봉인 사상에서는, 2개의 부동점이 불안정한 어떤 파라미터 구간에서 다양한 주기의 안정 주기 궤도가 계속 출현하고, 그 출현 패턴(어떤 주기의 안정 주기 궤도의 출현 횟수와 출현 순서)은 공통적이라는 것이 알려져 있다.[48] 즉, 이 종류의 사상이라면, 사상의 구체적인 형태에 관계없이 안정 주기 궤도의 계열은 동일해진다.[56] 로지스틱 사상의 경우에는 가 그 파라미터 구간이었지만, 사인 사상에서는 이 공통적인 안정 주기 궤도의 계열이 일어나는 파라미터 구간이다.[48] 이 보편성이 있는 안정 주기 궤도의 계열은 '''U계열'''이라고 불린다.[55]
6. 2. 파이겐바움 상수
Feigenbaum constant영어라고도 불리는 파이겐바움 상수는 주기 배증이 일어나는 간격의 비율이 수렴하는 값이다. Logistic map영어뿐만 아니라 다른 단봉 사상에서도 같은 값이 나타난다.- 3.54409를 넘어서 증가하면, 거의 모든 초기 조건에서 개체군은 8개의 값 사이에서 진동하다가 16개, 32개 등으로 접근하게 된다. 주어진 길이의 진동을 산출하는 매개변수 구간의 길이는 빠르게 감소하며, 두 연속적인 분기 구간 길이의 비율은 페이겐바움 상수에 접근한다. 이러한 현상은 주기 배가 연쇄의 한 예이다.
- 이 숫자는 난류와 유사한 다른 카오스 현상의 시작을 위한 레이놀즈 수의 등가로 비교하고 이해해야 하며, 상전이의 임계 온도와 유사하다. 본질적으로 위상 공간에는 시스템의 미세한 상태를 특징짓는 추가 동적 변수가 있는 사례의 전체 하위 공간이 포함되어 있으며, 이는 난류의 경우 와류로, 상전이의 경우 질서 매개변수로 이해할 수 있다.
- 3.56995에서 주기 배가 폭포의 끝에서 카오스의 시작점이다. 거의 모든 초기 조건에서 유한한 주기의 진동은 더 이상 보이지 않는다. 초기 개체 수의 약간의 변화는 시간이 지남에 따라 극적으로 다른 결과를 초래하며, 이는 카오스의 주요 특징이다.
- 3.56995를 넘는 대부분의 값은 카오스적 거동을 보이지만, 비카오스적 거동을 보이는 특정 고립된 범위가 여전히 있다. 이것을 때때로 '안정성의 섬'이라고 부른다. 예를 들어, 1 + [10] (약 3.82843)에서 시작하여 세 값 사이에서 진동을 보이는 매개변수의 범위가 있으며, 약간 더 높은 값에서는 6 값 사이, 다음으로 12 값 사이 등으로 진동한다.
- 매개변수가 약 3.56995에서 약 3.82843까지 변화함에 따라 로지스틱 시퀀스의 카오스적 거동의 전개를 때때로 Pomeau–Manneville 시나리오라고 부르며, 이는 비주기적 거동의 폭발에 의해 중단된 주기적(층류) 위상으로 특징지어진다. 이러한 시나리오는 반도체 장치에 적용될 수 있다.[12] 5개의 값 사이에서 진동을 생성하는 다른 범위가 있다. 모든 진동 주기는 일부 값에서 발생한다. 매개변수가 있는 '주기 배가 윈도우'는 일련의 하위 범위로 구성된 값의 범위이다. 번째 하위 범위에는 주기의 안정적인 사이클(단위 측도의 초기 점 집합을 끌어들이는 사이클)이 있는 값이 포함되어 있다. 이 하위 범위 시퀀스를 '고조파 폭포'라고 한다.[13] 주기의 안정적인 사이클이 있는 하위 범위에는 모든 에 대해 주기의 불안정한 사이클이 있다. 하위 범위의 무한 시퀀스의 끝에 있는 값은 고조파 폭포의 '누적점'이라고 한다. 이 증가함에 따라 다른 값을 가진 새로운 윈도우가 연속적으로 나타난다. 첫 번째 윈도우는 에 대한 것이다. 홀수를 포함하는 모든 후속 윈도우는 임의로 큰 에서 시작하여 가 감소하는 순서로 발생한다.[13][14]
- 에서 분기 다이어그램의 두 카오스적 밴드가 로지스틱 맵의 첫 번째 Misiurewicz point에서 교차한다. 이는 방정식을 만족한다.[15]
- 주기 배증을 통한 카오스 경로에서 나타나는 페이겐바움 함수이며(따라서 이는 보편성의 한 예이다), 주기 배증 간격이 점점 짧아짐에 따라 두 주기 배증 간격 간의 비율은 극한, 즉 첫 번째 파이겐바움 상수 로 수렴한다.
- 상수 는 여러 가능한 값을 시도하여 수치적으로 찾을 수 있다. 잘못된 값의 경우 맵이 극한으로 수렴하지 않지만, 일 때는 수렴한다. 이것이 두 번째 파이겐바움 상수이다.
- 이 에 접근하면, 주기가 3, 6, 12, ...인 또 다른 주기 배가 카오스에 접근하게 되는데, 이 역시 동일한 파이겐바움 상수 를 갖는다. 의 극한도 동일한 페이겐바움 함수이다. 이는 보편성의 한 예이다.
- 일반적으로 각 주기 곱셈 카오스로 가는 경로는 고유한 파이겐바움 상수 쌍을 갖는다. 실제로 일반적으로 두 개 이상이 있다. 예를 들어, 주기-7중의 경우 파이겐바움 상수 쌍이 최소 9개 있다.[4]
- 일반적으로 이며, 두 숫자가 무한대로 증가함에 따라 관계는 정확해진다. .
- 포물선 극댓값을 갖는 1차원 맵의 보편성 및 페이겐바움 상수 , .[30][31]
- 파이겐바움 상수는 재정규화 논증을 통해 추정할 수 있다. (10.7절,[23]).
- 보편성에 의해, 우리는 혼돈으로 가는 과정에서 반복적인 주기 배증을 겪는 다른 함수군을 사용할 수 있으며, 이는 정확히 로지스틱 사상이 아니더라도 동일한 파이겐바움 상수를 생성한다.
7. 응용
로지스틱 사상은 영국의 수리 생물학자 로버트 메이의 연구에서 시작되어, 생물 개체수의 변화를 나타내는 식으로 알려졌다.[49] 차분 방정식을 사용한 이산 시간 모델에 적합한 로지스틱 사상은 생물 개체군의 동태를 설명하는 데 사용되지만, 실제 생물 개체군 모델로는 너무 단순하다는 한계가 있다.[52]
생물 개체수의 증식을 나타내는 가장 단순한 모델은 맬서스 모델로, 개체수가 항상 일정한 비율로 증가하는 것을 가정한다.[49] 그러나 이 모델은 개체수가 무한정 증가하여 현실적이지 않다.[49] 실제로는 환경이 유지할 수 있는 개체수에 한계가 있으므로, 개체수가 증가할수록 증식률이 감소하는 밀도 효과를 고려해야 한다.[49] 밀도 효과를 반영한 모델 중 하나가 로지스틱 사상이다.[49]
로지스틱 사상은 다음과 같은 형태로 나타낼 수 있다.
:
여기서 은 개체수를, 는 증식률과 관련된 매개변수를 나타낸다.
로지스틱 사상은 연속 시간 모델인 로지스틱 방정식을 오일러법으로 차분화하여 유도할 수도 있다.[49] 로지스틱 방정식은 다음과 같다.
:
여기서 은 개체수, 는 시간, 는 환경 수용력, 은 내적 자연 증가율을 나타낸다. 로지스틱 방정식의 해는 초기값에 관계없이 항상 환경 수용력 로 수렴하는 반면, 로지스틱 사상은 매개변수 값에 따라 다양한 거동을 보일 수 있다.
로지스틱 사상은 생물 개체수 모델로서 한계가 있지만, 개체군 자체의 동역학에 의해 다양한 변동이 일어날 수 있음을 시사한다.[52]
7. 1. 결합 사상계
여러 개의 로지스틱 사상을 결합하여 더 복잡한 시스템을 모델링할 수 있다. 로지스틱 사상은 원래 생물 개체 수 변화를 나타내는 모델이지만, 여러 개를 결합하면 동기 현상, 카오스적 순환 등 다양한 현상이 나타난다.[53]결합 사상 모델을 만들기 위해 로지스틱 사상을 사용하기도 하는데, 이는 로지스틱 사상이 이미 카오스의 전형적인 모델로 잘 알려져 있기 때문이다.[53]
결합 방법에는 여러 가지가 있다. 예를 들어, 대역 결합 사상에서는 다음과 같이 ''N''개의 사상을 결합한다.
:
여기서 는 ''i''번째 사상의 ''n'' 시점에서의 상태를 나타낸다.
또 다른 예로, 다음과 같이 두 변수의 차이를 이용하여 두 개의 사상 ''x''와 ''y''를 결합하는 간단한 모델도 있다.
:
이 식에서 에 로지스틱 사상을 적용할 수 있다.
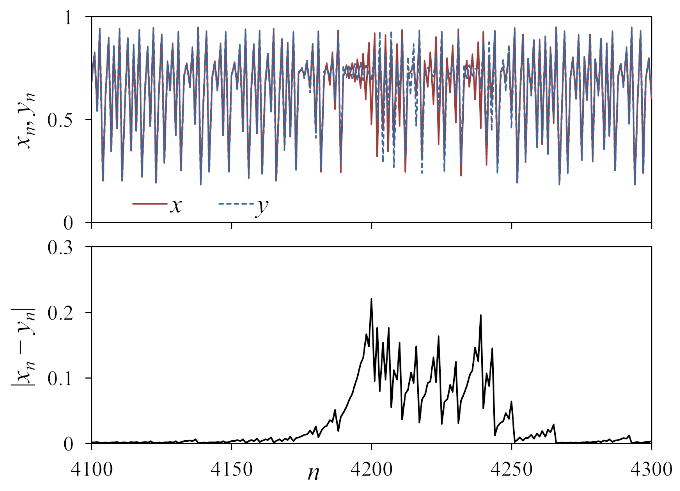
식 ()과 ()에서 와 는 사상 간 결합의 강도를 나타내는 매개변수이다. 로지스틱 사상을 결합할 때, 로지스틱 사상의 매개변수 는 모델의 비선형성 강도를 나타낸다.
와 또는 값을 바꾸면 다양한 현상이 나타난다. 예를 들어, 모델 ()에서 를 특정 값() 이상으로 하면 ''x''와 ''y''는 동기화되어 카오스 진동을 한다. 보다 작아도 항상 불규칙한 카오스 진동이 일어나는 것은 아니다. 가 특정 범위에 있을 때는 임에도 ''x''와 ''y''가 2주기 진동을 하기도 한다. 에서는 동기 상태와 비동기 상태가 번갈아 나타나는 현상도 관찰된다.
로지스틱 사상을 적용한 대자유도 대역 결합 사상 () 연구에서는 카오스적 순환이라는 현상도 발견되었다. 이는 질서 있는 상태(여러 클러스터로 묶여 진동)에서 혼란스러운 상태로, 다시 다른 클러스터 상태로, 또다시 혼란스러운 상태로 바뀌는 행동을 반복하는 현상이다.
7. 2. 의사 난수 생성기
로지스틱 사상은 카오스적 특성을 지니고 있어, 이를 활용하여 의사 난수를 생성할 수 있다.[54] 여러 가지 방법이 제안되었으며, 로지스틱 사상을 이용한 의사 난수 생성기의 가능성은 여러 연구자들에 의해 연구되었다.[55][60][56]주로 파라미터 $a=4$인 경우가 사용된다.[57][58][59] 1947년 스타니스와프 울람과 존 폰 노이만도 $a=4$인 로지스틱 사상을 이용한 의사 난수 생성 가능성을 언급했다.[64]
하지만, $a=4$인 로지스틱 사상에서 생성되는 값은 0과 1에 가까운 값으로 편향되는 경향이 있다.[55] 따라서 균일한 난수를 얻기 위해서는 추가적인 처리가 필요하다.[55] 그 방법으로는 다음 두 가지가 있다.
# 텐트 사상과의 관계를 이용하여 얻어진 수치를 균일 분포로 변환한다.[57]
# 앞서 언급한 동전 던지기의 비유처럼 임계값을 설정하여 얻어진 수치를 0 또는 1로 변환하고, 이를 반복하여 균일 난수의 비트열을 생성한다.[59]
또한, 로지스틱 사상에서 얻어지는 수열에서 $x_n$과 $x_{n+1}$ 사이에는 강한 상관관계가 존재하여 의사 난수로서 문제가 될 수 있다.[55] 이를 해결하기 위해 사상을 1회 적용할 때마다 수열을 생성하는 대신, 적당한 $\tau$회 반복할 때마다 수열 $x_0, x_\tau, x_{2\tau}, \dots$를 생성해야 한다.[55] 예를 들어 첫 번째 방법에서는 $\tau > 10$ 또는 $\tau > 13$[55], 두 번째 방법에서는 $\tau > 16$에서 양호한 의사 난수를 얻을 수 있다고 한다.[59]
컴퓨터에서 유한한 계산 정밀도로 인해 카오스의 비주기적인 수열을 얻을 수 없고 유한한 주기열이 출력된다는 문제점이 있다.[60] 의사 난수 생성을 위해서는 가능한 긴 주기의 수열이 필요하다.[60] 그러나 단정밀도 부동소수점 수 계산에서 로지스틱 사상 $f_{a=4}$가 출력하는 수열의 주기는 가능한 최대 주기에 비해 매우 작아, 메르센 트위스터와 같은 기존 방법에 비해 성능이 떨어진다는 지적이 있다.[60]
$f_{a=4}$에서는 계산 중 수치가 고정점 0으로 수렴하여 값이 일정해질 우려도 있다.[61] 반면, 로지스틱 사상은 열린 구간 (0, 1) 내에서 항상 값을 가지므로 부동 소수점뿐만 아니라 고정 소수점에서도 문제없이 계산 가능하며, 고정 소수점 계산의 이점을 얻을 수 있다.[61] 고정 소수점은 동일 비트 수에서 부동 소수점보다 긴 주기 수열을 생성하고, 의도치 않은 0으로의 수렴을 방지할 수 있다.[61]
7. 3. 복소수 확장
로지스틱 사상을 복소수 영역으로 확장하면, 만델브로 집합, 줄리아 집합 등 프랙탈 도형이 나타난다. 복소해석 함수로 정의된 역학계는 다음과 같은 2차 함수로 표현될 수 있다.:
여기서 파라미터 와 변수 는 복소수이다. 이 사상은 로지스틱 사상과 기본적으로 같은 것이며, 선형 함수에 의해 로지스틱 사상과 위상 공액 관계에 있다.
초기값 를 바꾸면서 반복 계산을 했을 때, 에서도 가 무한대로 발산하지 않는 의 집합을 충전 주리아 집합이라고 한다. 충전 주리아 집합의 경계를 주리아 집합이라고 한다. 초기값을 으로 고정하고 파라미터 를 바꾸면서 반복 계산을 했을 때, 가 무한대로 발산하지 않는 의 집합을 만델브로 집합이라고 한다. 주리아 집합이나 만델브로 집합으로부터 프랙탈 그림이 생성된다.
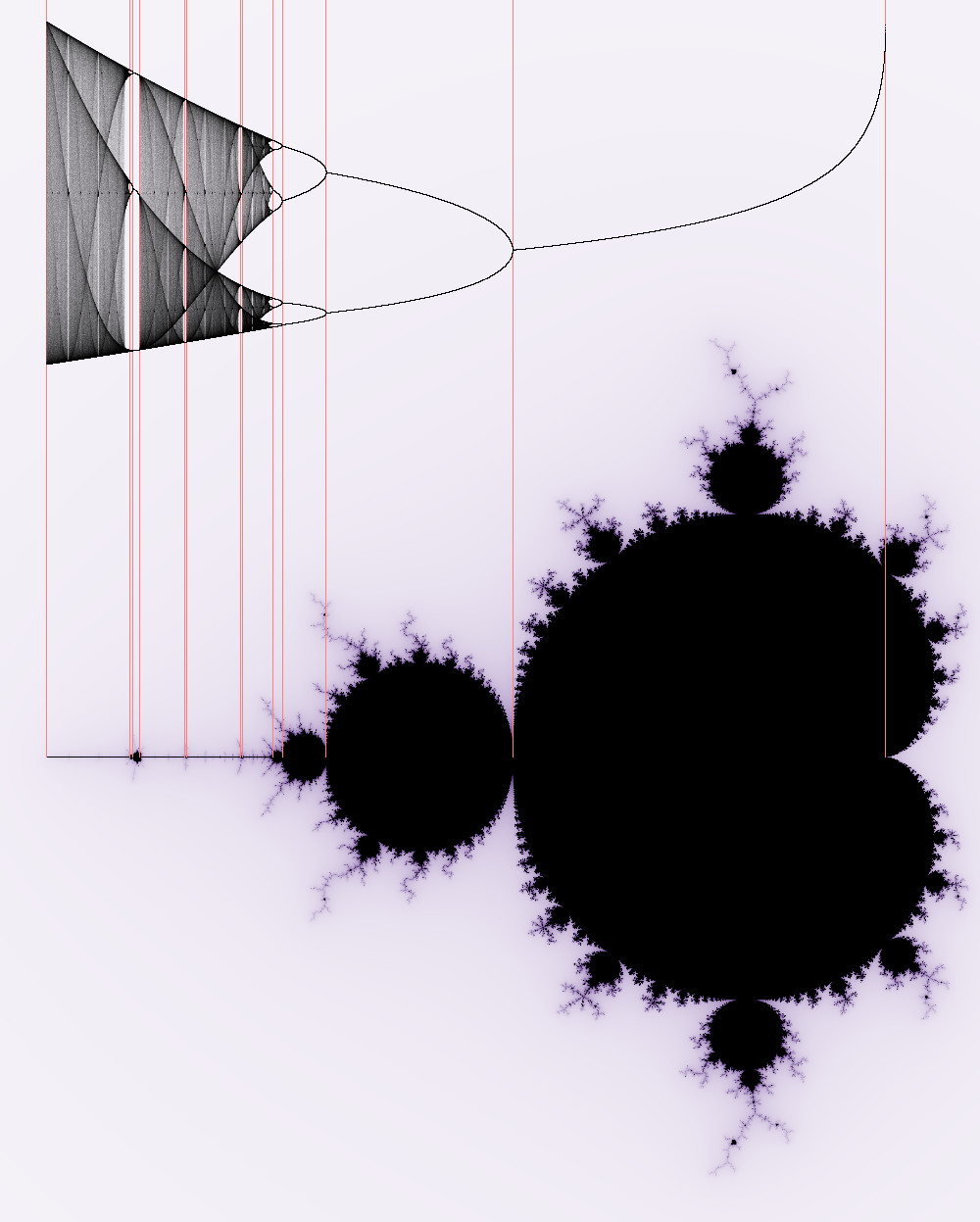
특히 만델브로 집합에서, 도형의 각 원반은 어떤 주기의 점근 안정한 주기 궤도의 영역에 해당한다. 로지스틱 사상의 궤도도와 만델브로 집합의 그림을 비교하면, 로지스틱 사상 궤도도의 점근 안정한 고정점, 주기 배가 분기, 주기 3의 창 등이 만델브로 집합 그림과 실축상에서 대응하고 있음을 알 수 있다.
7. 4. 시간 지연
로지스틱 사상을 생물의 각 세대 개체수를 나타내는 모델로 해석하면, 다음 세대 개체수가 현재 세대 개체수뿐만 아니라 그 한 세대 전의 개체수도 현재 세대에 영향을 미치는 경우도 생각할 수 있다[62]。 그러한 예가
: ''x''n+1 = a ''x''n (1 - ''x''n-1)
라는 차분 방정식으로, 한 세대 전의 개체수 ''x''''n''−1|''x''''n''−1영어가 마이너스 밀도 효과로 식에 포함되어 있다[62]。 ''x''''n''+1|''x''''n''+1영어 = ''y''''n''|''y''''n''영어라고 하면, 위 식은 다음과 같은 2변수 차분 방정식으로 바뀐다[62]。
| xn+1 = yn |
| yn+1 = a yn (1 - xn ) |
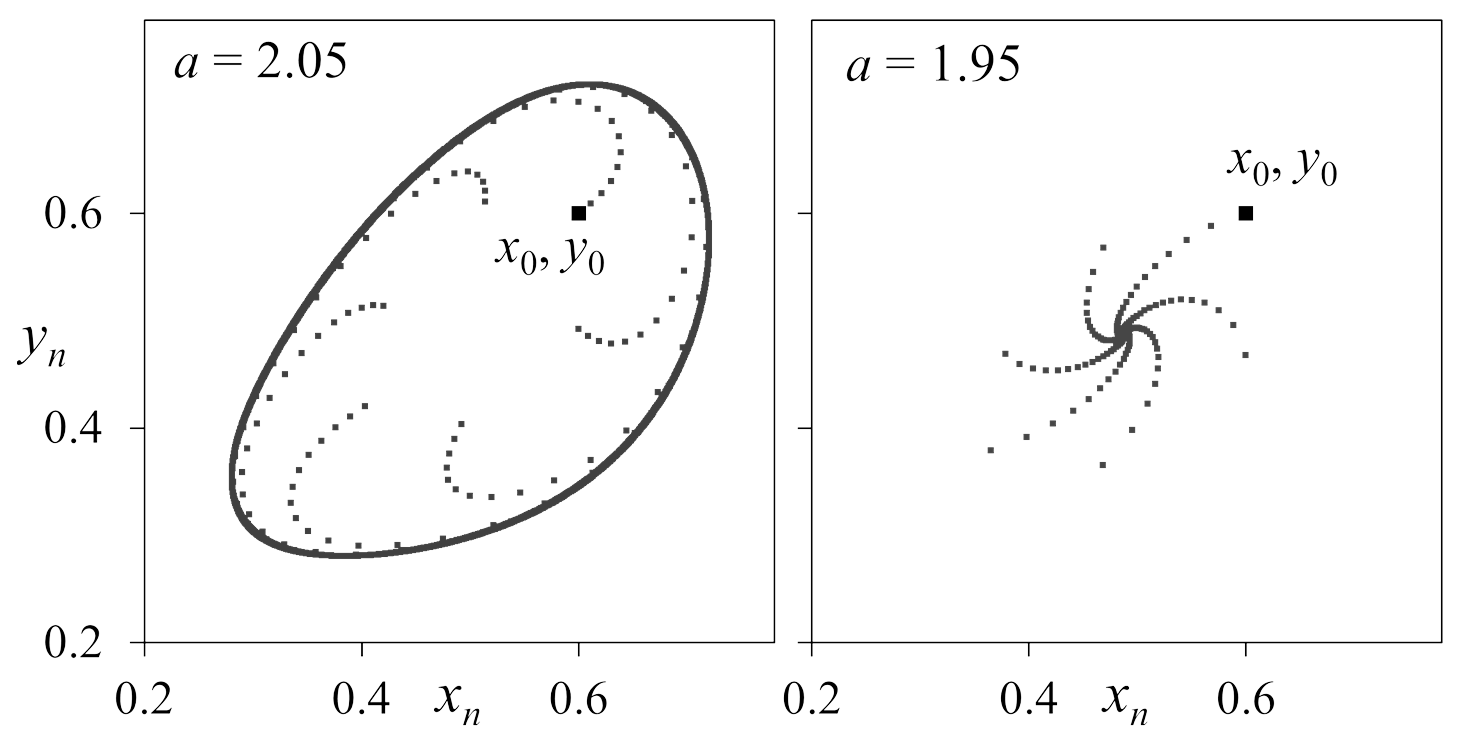
이 역학계는 준주기 어트랙터의 분기 연구 등에 사용되며, '''지연 로지스틱 사상''' 또는 '''디레이드 로지스틱 맵'''(delayed logistic map)이라고 불린다[62]。 지연 로지스틱 사상에서는 ''a''|''a''영어 = 2에서 네이마르크-사커 분기가 일어나, 점근적으로 안정된 부동점이 불안정해지고, 그 불안정한 부동점 주위에 점근적으로 안정된 불변 곡선이 생긴다[62]。
8. 연구사
가스통 줄리아와 피에르 파투는 1920년대에 복소 함수 반복에 대한 연구를 진행했다.[63] 그러나 당시에는 컴퓨터 그래픽 등이 없었기 때문에 연구는 중단되었고, 1970년대 후반까지 복소 역학계 연구는 쇠퇴했다.[63]

1947년, 스타니스와프 울람과 존 폰 노이만은 `f(x) = 4x(1 - x)`라는 이차 함수 반복을 통해 의사 난수를 생성할 수 있음을 보였다.[64] 이는 현재 관점에서 a=4인 로지스틱 사상에 해당한다.
1970년대 초, 수리생물학자 로버트 메이는 생태학 연구 과정에서 로지스틱 사상을 도입하여 분석하고, 그 결과를 발표했다.[67] 1976년에는 "Simple mathematical models with very complicated dynamics"라는 논문을 ''네이처''에 발표했다. 이 논문은 단순한 비선형 함수에서도 주기 배증 분기, 카오스와 같은 복잡한 현상이 나타날 수 있음을 강조하여 큰 반향을 일으켰다. 메이의 연구는 많은 연구자들을 카오스 연구로 이끌었으며, 카오스 연구의 흐름을 다시 시작하게 했다고 평가받는다.
1975년경, 미첼 파이겐바움은 로지스틱 사상의 주기 배증 분기에서 분기값이 등비 급수적으로 수렴하는 스케일링 법칙을 발견하고, 파이겐바움 상수의 존재를 수치 실험으로 확인했다.
참조
[1]
학술지
The problem of deducing the climate from the governing equations
https://a.tellusjour[...]
1964-02-01
[2]
학술지
Simple mathematical models with very complicated dynamics
[3]
MathWorld
Logistic Equation
https://encyclopedia[...]
[4]
harvnb
[5]
서적
Fractals and Chaos, The Mandelbrot Set and Beyond
https://link-springe[...]
[6]
harvnb
[7]
harvnb
[8]
harvnb
[9]
harvnb
[10]
학술지
Period three begins
2010-10
[11]
학술지
The Birth of Period 3, Revisited
https://doi.org/10.1[...]
1996-04-01
[12]
학술지
Observation of a Pomeau–Manneville intermittent route to chaos in a nonlinear oscillator
http://www.escholars[...]
[13]
학술지
Simple mathematical models with very complicated dynamics
[14]
학술지
Chaos: Significance, Mechanism, and Economic Applications
1989-02
[15]
웹사이트
Misiurewicz Point of the Logistic Map
https://sprott.physi[...]
2023-05-08
[16]
서적
Ordinary Differential Equations and Dynamical Systems
https://www.mat.univ[...]
Amer. Math Soc.
[17]
서적
Iterated Maps on the Interval as Dynamical Systems
https://archive.org/[...]
Birkhauser
[18]
학술지
The Complete Bifurcation Diagram for the Logistic Map
1997-02-11
[19]
harvnb
[20]
문서
Chaos theory
[21]
웹사이트
https://encyclopedia[...]
[22]
서적
Chaos: Making a New Science
Penguin Books
[23]
서적
Nonlinear dynamics and chaos : with applications to physics, biology, chemistry, and engineering
https://www.worldcat[...]
2019
[24]
학술지
Absolutely continuous invariant measures for one-parameter families of one-dimensional maps
http://projecteuclid[...]
[25]
arXiv
Automated scalable Bayesian inference via Hilbert coresets
2017
[26]
학술지
Chaotic root-finding for a small class of polynomials
http://www.maxlittle[...]
[27]
학술지
Ueber iterirte Functionen
[28]
학술지
The problem of deducing the climate from the governing equations
1964
[29]
학술지
Dependence of universal constants upon multiplication period in nonlinear maps
https://link.aps.org[...]
1985-01-01
[30]
간행물
"Universality in complex discrete dynamics"
http://chaosbook.org[...]
Los Alamos Theoretical Division Annual Report 1975-1976
1976
[31]
학술지
Quantitative universality for a class of nonlinear transformations
1978
[32]
학술지
Regular and stochastic self-modulation in a ring laser with nonlinear element
[33]
학술지
The 50th Anniversary of the Metaphorical Butterfly Effect since Lorenz (1972): Multistability, Multiscale Predictability, and Sensitivity in Numerical Models
2023-08-12
[34]
학술지
Space–temporal behavior of a light pulse propagating in a nonlinear nondispersive medium
[35]
서적
カオス・インパクト ―カオスは自然科学と社会科学に何をもたらしたか
https://www.morikita[...]
森北出版
[36]
논문
簡素な1次元マップについて(2) -カオス-
日本医用画像工学会
[37]
서적
生物集団の数学(上) ―人口学・生態学・疫学へのアプローチ
https://www.nippyo.c[...]
日本評論社
[38]
서적
力学系 上
シュプリンガー・フェアラーク東京
[39]
서적
なっとくする集合・位相
https://bookclub.kod[...]
サイエンス社
[40]
서적
数学小辞典
共立出版
[41]
서적
力学系とエントロピー
https://www.kyoritsu[...]
共立出版
[42]
서적
馬蹄への道 ―2次元写像力学系入門
https://www.kyoritsu[...]
共立出版
[43]
서적
フラクタル/カオス2 ―複素世界のニュートン法
ラッセル社
[44]
웹사이트
Logistic Map--r=4
http://mathworld.wol[...]
Wolfram Research
2014-11-13
[45]
웹사이트
Logistic Map--r=2
http://mathworld.wol[...]
Wolfram Research
2014-11-13
[46]
웹사이트
Logistic Map--r=-2
http://mathworld.wol[...]
Wolfram Research
2014-11-13
[47]
웹사이트
Section 11: Traditional Mathematics and Mathematical Formulas
https://www.wolframs[...]
2022-07-08
[48]
논문
On finite limit sets for transformations on the unit interval
Academic Press, Inc.
[49]
서적
Modeling Life: The Mathematics of Biological Systems
Springer
[50]
서적
ねずみ算からはじめる数理モデリング ―漸化式でみる生物個体群ダイナミクス
https://www.kyoritsu[...]
共立出版
[51]
서적
世界を変えた17の方程式
https://www.sbcr.jp/[...]
ソフトバンククリエイティブ
[52]
서적
数学で生命の謎を解く
https://www.sbcr.jp/[...]
ソフトバンククリエイティブ
[53]
서적
リズム現象の世界
http://www.utp.or.jp[...]
東京大学出版会
[54]
논문
カオスからの擬似乱数生成とその応用に関する研究
http://www.ishida-ki[...]
石田實記念財団
[55]
논문
テント写像に基づいた擬似乱数生成法
http://id.nii.ac.jp/[...]
情報処理学会
[56]
웹사이트
A Pseudo-Random Bit Generator Using Three Chaotic Logistic Maps
https://hal.archives[...]
HAL
2022-02-11
[57]
arXiv
Logistic Map: A Possible Random Number Generator
1993
[58]
논문
ロジスティック写像による擬似乱数発生法
http://id.nii.ac.jp/[...]
情報処理学会
[59]
논문
擬似乱数とカオス
http://id.nii.ac.jp/[...]
情報処理学会
[60]
논문
Analyzing logistic map pseudorandom number generators for periodicity induced by finite precision floating-point representation
[61]
서적
カオスエンジニアリング ―カオス・集積回路・デジタルコンピュータ
シュプリンガー・フェアラーク東京
[62]
서적
カオス ―カオス理論の基礎と応用
https://www.saiensu.[...]
サイエンス社
[63]
서적
カオス的世界像 ―非定形の理論から複雑系の科学へ
http://www.hakuyo-sh[...]
白揚社
[64]
학위논문
整数ロジスティック写像を用いた乱数生成法とその応用
http://id.nii.ac.jp/[...]
電気通信大学
[65]
웹사이트
History of iterated maps
http://www.wolframsc[...]
2022-02-26
[66]
서적
カオスはこうして発見された
https://www.kyoritsu[...]
共立出版
[67]
서적
カオスはこうして発見された
https://www.kyoritsu[...]
共立出版
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com