적외선 유도
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
적외선 유도는 적외선 센서를 통해 목표물에서 방출되는 적외선을 감지하여 추적하는 유도 방식이다. 1901년 자가디시 찬드라 보스의 연구를 시작으로, 제2차 세계 대전 중 독일에서 야간 전투기 및 대공 공격용 시스템 개발이 이루어졌다. 전후 미국은 PbS 센서를 기반으로 한 적외선 탐색기를 개발하여 미사일에 적용했으며, AIM-4 팰컨, AIM-9 사이드와인더 등이 실전에 투입되었다. 영국, 프랑스, 소련 등에서도 적외선 유도 미사일 개발이 이루어졌고, 베트남 전쟁을 거치며 성능 개선이 이루어졌다. 적외선 유도 방식은 수동, 반능동, 능동 방식으로 분류되며, 센서 방식에 따라 열형 검지기, 양자형 검지기를 사용한다. 스캐닝 패턴, 센서 유형에 따라 다양한 방식이 개발되었으며, 플레어나 재머와 같은 대응책을 통해 무력화될 수 있다. 현대에는 영상 적외선(IIR)을 사용하는 미사일이 개발되었으며, 한국은 탄도 미사일 요격에 적외선 유도 기술을 활용하고 있다.
더 읽어볼만한 페이지
- 미사일 유도 - 능동 레이더 유도
능동 레이더 유도는 미사일에 송신기와 수신기를 탑재하여 자체적으로 목표물을 추적하는 레이더 호밍 유도 방식으로, 발사 후 망각 능력을 제공하며 전자전 환경에서 높은 명중률을 보이지만, 미사일 탑재 공간 및 전력 제약으로 유효 사거리가 제한될 수 있어 교전의 종말 단계에서 주로 사용된다. - 미사일 유도 - 빔 라이딩
빔 라이딩은 좁은 레이더 또는 레이저 빔을 목표물에 쏘아 미사일을 유도하는 방식으로, 주로 이동 목표물을 파괴하는 데 사용된다. - 적외선 영상 - 열화상 카메라
열화상 카메라는 적외선을 감지해 물체의 온도 분포를 영상으로 보여주는 장치로, 냉각 장치 사용 여부에 따라 양자형과 비냉각형으로 나뉘며 군사 목적에서 시작하여 현재는 다양한 분야에서 활용되고 있고 기술 발전과 가격 하락으로 활용 범위가 확대될 전망이다. - 적외선 영상 - FLIR
FLIR은 적외선을 이용하여 열을 감지하는 기술로, 장파장과 중파장 적외선 시스템으로 나뉘며, 다양한 분야에서 활용되지만 사생활 침해와 같은 윤리적 문제도 존재한다. - 항법 - 위도
위도는 지구 표면의 남북 위치를 각도로 나타내며, 지구를 회전 타원체로 가정했을 때 법선과 적도면이 이루는 각으로 측정하여 적도를 0°로 북극과 남극까지 나타내고, 기후와 지리적 특징 등에 영향을 미치는 다양한 종류가 존재한다. - 항법 - 측지계
측지계는 지구의 형태와 위치를 수학적으로 모델링하여 위도, 경도, 고도 등을 정의하고 측량, 지도 제작, GPS 등에 활용되는 기준 좌표계이다.
2. 역사
1901년 인도 과학자 자가디시 찬드라 보스는 황화납(PbS)이 적외선을 받으면 전자를 방출하는 현상을 발견했지만, 당시에는 활용도가 낮았다.[4] 1917년 시어도어 케이스는 탈륨과 황의 혼합물이 적외선에 더 민감하게 반응한다는 것을 발견했지만, 실용적인 탐지기로 사용하기는 어려웠다. 이 혼합물은 미 해군에서 안전한 통신 시스템으로 사용되었다.[5]
1930년대에는 Ag-O-Cs (은-산소-세슘) 광전자 증배관이 개발되어 적외선 탐지에 대한 실용적인 해결책을 제시했다. 이는 영국과 독일 등에서 군사적 목적으로 연구되기 시작했다. 영국에서는 레이더가 더 나은 해결책이라는 인식이 확산되면서 연구가 지지부진했다.[6]
독일에서는 베를린 대학교의 에드거 쿠츠셰르가 AEG와 협력하여 적외선 연구를 주도했다. 1940년 ''Spanner Anlage''(훔쳐보기 시스템)을 개발하여 메서슈미트 Bf 110, 도르니에 Do 17 야간 전투기에 장착했지만, 200m 이내에서만 표적을 볼 수 있어 실용성이 떨어졌다.[8] 15대만 제작된 후 1942년에 개선된 독일 공중 레이더 시스템으로 대체되었다.[9] AEG는 전차용으로도 동일한 시스템을 연구하여 FG 1250을 제한적으로 생산했으며, StG 44 돌격 소총과 함께 야간 사용을 위한 Zielgerät 1229 ''Vampir'' 소총 조준경을 개발했다.[10]
독일은 대공 및 대함 공격용 자동 탐색 시스템 개발을 추진했으며, 전쟁이 끝났을 때 일부는 사용할 준비가 되었지만, 미사일 기체에 통합하는 작업은 없었다.[9] 쿠츠셔 팀은 블롬 & 포스 BV 143 활공 폭탄에 설치하기 위한 ''함부르크''라는 시스템과 적외선 근접 신관을 개발했다.[9] 다른 회사들도 자체적인 스캔 방법을 설계했다. 비엔나의 AEG와 Kepka는 수평 또는 수직으로 스캔하는 시스템을 사용했고, 라인메탈-보르시히와 AEG의 또 다른 팀은 회전 디스크 시스템에 대한 다양한 변형을 생산했다.[9]
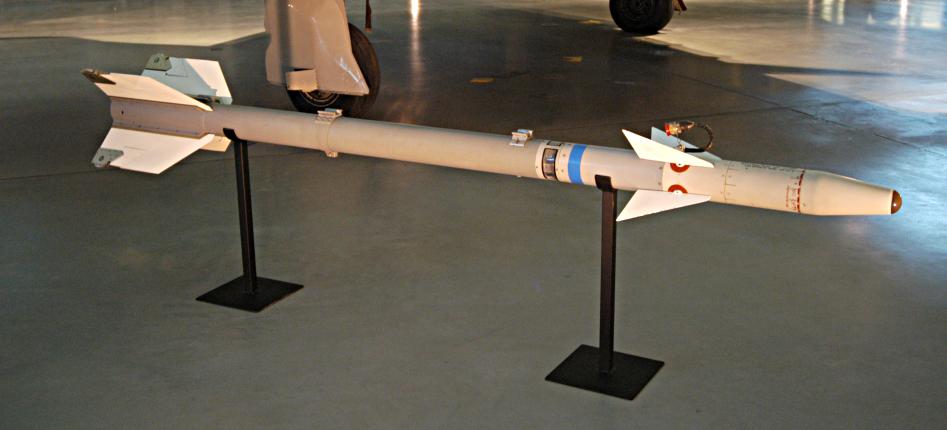
전후, 미국은 PbS 센서를 기반으로 한 적외선 탐색기 개발을 시작했다. 휴즈 항공기(Hughes Aircraft)는 AIM-4 팰컨(AIM-4 Falcon)을 개발했고,[12] 해군 항공 무기 기지 차이나 레이크(Naval Air Weapons Station China Lake)의 윌리엄 B. 맥클린(William B. McLean)은 AIM-9 사이드와인더(AIM-9 Sidewinder)를 개발했다.[14]
영국은 파이어스트릭(Firestreak)을,[16] 프랑스는 R.511을,[17] 소련은 빔펠 K-13(Vympel K-13)을 개발했다.[13]
베트남 전쟁은 기존 미사일 설계의 문제점을 드러냈고, 이를 개선하기 위한 노력이 진행되었다. 미국은 AIM-9 사이드와인더의 성능을 개량하고, '전방위' 교전 능력을 부여했다. 개선된 사이드와인더(L 모델)는 포클랜드 전쟁에서 높은 명중률을 기록했다.[20] 소련은 R-73 미사일을 개발하여 탐색기 시야 밖의 목표물에 대한 발사 기능을 도입했다.[20] 유럽은 ASRAAM 개발에 착수했으나, 성능 요구 사항 차이로 인해 지연이 발생했다. 미국은 ASRAAM 프로그램에서 탈퇴하고, AIM-9X 사이드와인더를 개발했다. ASRAAM은 결국 유럽 여러 국가에서 채택되었으며, 이 기술은 중국 PL-10, 이스라엘 Python-5 등에도 적용되었다.
1955년 컨베어(Convair)는 소형 휴대용 미사일(MANPADS) 연구를 시작했으며, 이는 FIM-43 Redeye로 발전했다. 1961년에 시험에 들어갔지만 초기 설계는 성능이 좋지 않아 여러 차례 주요 업그레이드를 거쳤다. 1968년에 Block III 버전이 생산에 들어갔다.[21]
소련은 1964년 Strela-1과 Strela-2 개발을 시작했다. 9K32 Strela-2는 Redeye보다 짧은 개발 기간을 거쳐 1968년에 실전에 배치되었다.[22] 영국은 1975년 블로우파이프(Blowpipe) 개발을 시작했지만, 탐색기를 미사일 대신 발사대에 배치했다. 초기 무기들은 효과가 없는 것으로 드러났으며, 블로우파이프는 거의 모든 전투에서 실패했고,[23] Redeye는 다소 나은 결과를 보였다. Strela-2는 중동과 베트남에서 여러 번의 격추를 기록하며 더 좋은 성과를 거두었다.[24]
1967년 Redeye에 대한 주요 업그레이드 프로그램이 Redeye II로 시작되었다. 1978년에 FIM-92 스팅어(FIM-92 Stinger)로 이름이 변경된 미사일의 첫 인도가 시작되었다. 1983년 B 모델에 개선된 로제트 탐색기가 추가되었고, 여러 추가 업그레이드가 이어졌다. 소련-아프가니스탄 전쟁에 투입되어 소련 헬리콥터에 대해 79%의 성공률을 기록했다고 주장했지만,[25] 이는 논쟁의 여지가 있다.[26] 소련 역시 자체 버전을 개선하여 1974년에 9K34 Strela-3를, 1983년에는 크게 개선된 듀얼 주파수 9K38 이글라(9K38 Igla)를, 2004년에는 Igla-S를 도입했다.[20]
2. 1. 초기 연구
1901년, 인도 과학자 자가디시 찬드라 보스는 황화납(PbS)이 적외선을 받으면 전자를 방출하는 현상을 발견했다. 하지만 당시에는 활용도가 낮아 1904년 특허가 만료되었다.[4] 1917년, 시어도어 케이스는 탈륨과 황의 혼합물이 적외선에 더 민감하게 반응한다는 것을 발견했지만, 전기적 불안정성 때문에 실용적인 탐지기로 사용하기는 어려웠다. 그럼에도 불구하고, 이 혼합물은 미 해군에서 안전한 통신 시스템으로 한동안 사용되었다.[5]
1930년대에는 Ag-O-Cs (은-산소-세슘) 광전자 증배관이 개발되어 적외선 탐지에 대한 실용적인 해결책을 제시했다. 광전자 증배관은 갈레나 층에서 방출되는 신호를 증폭하여 장거리에서 뜨거운 물체를 탐지할 수 있게 해주었다. 이는 영국과 독일 등에서 야간 폭격기 탐지와 같은 군사적 목적으로 연구되기 시작했다.
영국에서는 레이더가 더 나은 해결책이라는 인식이 확산되면서 연구가 지지부진했다. 윈스턴 처칠의 과학 고문이었던 프레더릭 린데만은 적외선 연구에 전념했지만, 티자드 위원회의 레이더 개발을 방해하면서 위원회가 재구성되고 린데만은 제외되었다.[6]
독일에서는 베를린 대학교의 에드거 쿠츠셰르가 AEG와 협력하여 적외선 연구를 주도했다. 1940년까지 그들은 조종사 앞에 탐지 광전자 증배관을 놓고 탐조등으로 빛을 비추는 ''Spanner Anlage''(훔쳐보기 시스템)을 개발했다. 이 장치는 메서슈미트 Bf 110 및 도르니에 Do 17 야간 전투기에 장착되었지만, 200m 이내에서만 표적을 볼 수 있어 실용성이 떨어졌다.[8] 15대만 제작된 후 1942년에 개선된 독일 공중 레이더 시스템으로 대체되었다.[9]
AEG는 전차용으로도 동일한 시스템을 연구하여 FG 1250을 제한적으로 생산했으며, StG 44 돌격 소총과 함께 야간 사용을 위한 Zielgerät 1229 ''Vampir'' 소총 조준경을 개발했다.[10]
2. 2. 독일의 탐색기 개발
베를린 대학교의 에드거 쿠츠셰르는 AEG와 협력하여 적외선(IR) 개발 연구를 주도했다. 1940년까지 그들은 조종사 앞에 탐지 광전자 증배관을 놓고, IR 범위로 제한하는 필터가 장착된 대형 탐조등으로 구성된 ''Spanner Anlage''(대략 "훔쳐보기 시스템")를 개발했다.[8] 이 시스템은 단거리에서 표적을 볼 수 있을 만큼 충분한 빛을 제공했으며, 소수의 메서슈미트 Bf 110 및 도르니에 Do 17 야간 전투기에 장착되었다. 그러나 이 장치는 실제로 거의 쓸모가 없었는데, 조종사들은 표적이 200m에서만 보이기 시작한다고 불평했다.[8] 결국 15대만 제작되었고, 1942년 독일 공중 레이더 시스템이 개선되면서 제거되었다.[9]AEG는 전차에 사용하기 위해 동일한 시스템을 연구해 왔으며, 전쟁을 통해 여러 모델을 배치했고, 1943년부터 FG 1250의 제한적인 생산을 시작했다.[10] 이 작업은 StG 44 돌격 소총과 함께 야간 사용을 위한 Zielgerät 1229 ''Vampir'' 소총 조준경으로 정점에 달했다.[10]
독일은 대공 및 대함 공격용 자동 탐색 시스템 개발을 추진했다. 이러한 장치들은 전쟁이 끝났을 때에도 개발 중이었고, 일부는 사용할 준비가 되었지만, 미사일 기체에 통합하는 작업은 없었다. 1944년 여름 독일 항공부에 제출된 보고서에 따르면 이러한 장치는 레이더 또는 음향 방식의 경쟁 시스템보다 훨씬 더 잘 개발되었다.[9]
쿠츠셔 팀은 킬의 Eletroacustic Company와 함께 블롬 & 포스 BV 143 활공 폭탄에 설치되어 자동 발사 후 잊혀지는 대함 미사일을 생산하기 위한 ''함부르크''라는 시스템을 개발했다. 또한 미사일 중심선에서 방사형으로 바깥쪽을 향하는 추가 감지기를 배치하여 작동하는 적외선 근접 신관을 개발했다.[9]
다른 회사들도 Eletroacustic의 연구를 받아들여 자체적인 스캔 방법을 설계했다. 비엔나의 AEG와 Kepka는 수평 또는 수직으로 지속적으로 스캔하는 두 개의 가동 플레이트가 있는 시스템을 사용했다. Kepka의 ''Madrid'' 시스템은 약 1.8도의 순간 시야(IFOV)를 가지고 있었고, 20도의 전체 패턴을 스캔했다. 라인메탈-보르시히와 AEG의 또 다른 팀은 회전 디스크 시스템에 대한 다양한 변형을 생산했다.[9]
2. 3. 전후 설계
전후, 미국은 PbS 센서를 기반으로 한 적외선 탐색기 개발을 시작했다. 휴즈 항공기(Hughes Aircraft)는 MX-798, MX-904 프로젝트를 통해 적외선 추적 미사일을 개발했고, 이는 AIM-4 팰컨(AIM-4 Falcon)으로 이어졌다.[12] 해군 항공 무기 기지 차이나 레이크(Naval Air Weapons Station China Lake)의 윌리엄 B. 맥클린(William B. McLean)은 더 단순한 설계의 적외선 미사일 개발을 추진했으며, 이는 AIM-9 사이드와인더(AIM-9 Sidewinder)로 발전했다.[14]영국은 파이어스트릭(Firestreak)을,[16] 프랑스는 R.511을,[17] 소련은 빔펠 K-13(Vympel K-13)을 개발했다.[13]
2. 4. 후기 설계
베트남 전쟁은 기존 미사일 설계의 문제점을 드러냈고, 이를 개선하기 위한 노력이 여러 국가에서 진행되었다. 미국은 AIM-9 사이드와인더의 성능을 개량하고, 모든 각도에서 추적이 가능한 새로운 탐색기를 개발하여 '전방위' 교전 능력을 부여했다. 개선된 사이드와인더(L 모델)는 포클랜드 전쟁에서 82%의 높은 명중률을 기록하며 우수한 성능을 입증했다.[20]소련은 R-73 미사일을 개발하여 탐색기 시야 밖의 목표물에 대한 발사 기능을 도입했다. 이는 헬멧 장착 시야와 결합하여 조종사가 미사일을 표적에 신속하게 지향할 수 있게 함으로써, 전투에서 상당한 이점을 제공했다.[20]
이러한 위협에 대응하기 위해 유럽은 ASRAAM 개발에 착수했으나, 각 회원국 간의 성능 요구 사항 차이로 인해 지연이 발생했다. 미국은 ASRAAM 프로그램에서 탈퇴하고, ASRAAM을 위해 개발된 기술을 활용하여 AIM-9X 사이드와인더를 개발했다. ASRAAM은 결국 유럽 여러 국가에서 채택되었으며, 이 기술은 중국 PL-10, 이스라엘 Python-5 등에도 적용되었다.
2. 5. MANPADs (휴대용 대공 미사일)
1955년 컨베어(Convair)는 초기형 사이드와인더와 동일한 원리를 기반으로 소형 휴대용 미사일(MANPADS) 연구를 시작했으며, 이는 FIM-43 Redeye로 발전했다. 1961년에 시험에 들어갔지만 초기 설계는 성능이 좋지 않아 여러 차례 주요 업그레이드를 거쳤다. 1968년에 Block III 버전이 생산에 들어갔다.[21]
소련은 1964년 Strela-1과 Strela-2 개발을 시작했다. 9K32 Strela-2는 Redeye보다 짧은 개발 기간을 거쳐 1968년에 실전에 배치되었다.[22] 경쟁 설계였던 9K31 Strela-1은 차량 탑재용으로 크기가 커졌으며, 거의 같은 시기에 실전에 배치되었다. 영국은 1975년 블로우파이프(Blowpipe) 개발을 시작했지만, 탐색기를 미사일 대신 발사대에 배치했다. 탐색기는 표적과 미사일을 모두 감지하여 무선 링크를 통해 미사일에 수정 사항을 전송했다. 초기 무기들은 효과가 없는 것으로 드러났으며, 블로우파이프는 거의 모든 전투에서 실패했고,[23] Redeye는 다소 나은 결과를 보였다. Strela-2는 중동과 베트남에서 여러 번의 격추를 기록하며 더 좋은 성과를 거두었다.[24]
1967년 Redeye에 대한 주요 업그레이드 프로그램이 Redeye II로 시작되었다. 1975년부터 테스트를 시작했고, 1978년에 FIM-92 스팅어(FIM-92 Stinger)로 이름이 변경된 미사일의 첫 인도가 시작되었다. 1983년 B 모델에 개선된 로제트 탐색기가 추가되었고, 여러 추가 업그레이드가 이어졌다. 소련-아프가니스탄 전쟁에 투입되어 소련 헬리콥터에 대해 79%의 성공률을 기록했다고 주장했지만,[25] 이는 논쟁의 여지가 있다.[26] 소련 역시 자체 버전을 개선하여 1974년에 9K34 Strela-3를, 1983년에는 크게 개선된 듀얼 주파수 9K38 이글라(9K38 Igla)를, 2004년에는 Igla-S를 도입했다.[20]
3. 원리
적외선(IR)은 태양이 없는 야간에도 사용할 수 있다. 모든 물체는 분자 운동에 의해 열을 발생시켜 외부로 방사하는데, 지상 물체가 방사하는 에너지의 파장대가 적외선 영역에 있어 적외선 이용에 유리하다. 일반적으로 적외선 유도는 수동 방식으로 사용되지만, 레이저를 이용한 반 능동 방식으로 사용되는 경우도 있다[28].
수동 방식은 목표 탐색 또는 추적 시 에너지를 방사하지 않으므로 은닉성이 높고, 무기로 적합하다[28]. 적외선 유도 미사일은 대공 미사일뿐만 아니라 대함 미사일, 대전차 미사일에도 채택되고 있다. NATO는 적외선 유도 방식의 공대공 미사일 발사에 ''Fox Two''라는 코드를 사용한다[29]. 호밍 유도이므로, 비행 경로는 비례 항법이 사용된다.
3. 1. 분류
호밍 유도는 목표 정보를 얻는 방법에 따라 세 가지 방식으로 분류된다. 미사일에 탑재된 수신기만 사용하는 수동 방식, 외부 목표 조사 에너지의 반사를 이용하는 반 능동 방식, 미사일에 송수신 장치를 모두 탑재하는 능동 방식이 있다.[1] 그러나 적외선 유도는 대기 감쇠 문제로 인해 주로 수동 방식만 사용된다.처리 방식으로는 목표물을 점으로 취급하는 레티클 방식과 이미지로 취급하는 이미지 방식이 있다.[3] 레이저 유도는 주로 반 능동 방식으로 사용되며, 4분할 방식의 검출기가 사용된다.[3]
3. 2. 매체와 목표의 특성
모든 물체는 분자 운동으로 열을 발생시켜 외부로 방사하는데, 지상 물체가 방사하는 에너지 파장대가 적외선 영역에 있어 적외선 유도에 유리하다. 군사적으로 이용되는 적외선은 가시광선보다 약간 긴 파장에서 12µm까지로 제한된다.[28]; 차량・함정
: 차체/선체와 다소 고온의 기관부로 구성되며, 약 10µm를 피크로 하는 적외선을 방출한다. 에스펙트 각도에 따라 방사 강도가 크게 변화하며, 장거리 포착 시 지구 곡률의 영향을 받는다.[28] 배경은 지표, 해면 등으로 구성되어 대비가 비교적 작고, 클러터의 영향이 크다.[28]
; 항공기・순항 미사일
: 항공기는 기체 후부의 고온의 제트 엔진 및 배기가스, 그리고 전연을 중심으로 기체 전체에서 공력 가열에 의한 적외선을 방출한다.
:* 배기가스: 기체 후부 배기구의 3µm 정도를 피크로, 후방의 제트 배기(플룸)에서는 가열된 이산화탄소 가스를 중심으로 5µm 정도까지의 적외선이 방출된다.
:* 공력 가열: 거의 10µm대(파장 8~12µm)에 해당한다.
: 배경은 하늘, 구름, 지평선/수평선 등으로 구성되어 비교적 큰 대비를 가진다.
: 적외선은 주파수 특성상 전파보다 대기권 내 투과성이 낮다. 따라서 서방 국가에서는 시정 외 사거리 미사일에 레이더 유도를, 시정 내 사거리 미사일에 적외선 유도를 채택하는 경우가 많다. 반면, 동구권에서는 표적 회피를 어렵게 해 명중률을 높이기 위해 레이더 유도와 적외선 유도 미사일을 동시에 발사하는 전법을 사용하므로, 시정 외 사거리 미사일에도 적외선 유도를 채택하는 경우가 있다.[28]
; 탄도 미사일
: 대기권 재진입 시, 재진입체는 극초음속(IRBM은 초속 2km, ICBM은 초속 약 7km 정도)이 되므로, 공력 가열로 수천 도 이상 가열되어 짧은 파장의 적외선을 많이 방출한다.
4. 탐색기 유형
적외선 유도 미사일 탐색기는 사용되는 적외선 센서 재료에 따라 여러 유형으로 나뉜다. 초기에는 황화납(II)(PbS)이 주로 사용되었으며, 이는 제트 엔진 배기가스에서 나오는 4.2µm 파장의 적외선을 감지하는 단색 탐색기에 적합했다. 1901년 자가디시 찬드라 보스가 황화납의 적외선 감응 효과를 발견했다.[4]
이후 안티몬화 인듐(InSb)과 텔루르화 수은 카드뮴(HgCdTe)이 개발되면서, 3~5µm 및 8~13µm 파장대를 감지하여 항공기 동체 자체의 적외선도 감지할 수 있는 전방위 탐색기가 등장했다. 현대 탐색기는 여러 파장대의 검출기를 결합한 이색 시스템을 사용한다.
전방위 탐색기는 높은 감도를 위해 냉각이 필요한 경우가 많다. AIM-9M 사이드와인더나 스팅어 미사일과 같은 현대 전방위 미사일은 아르곤을 이용한 줄-톰슨 효과로 센서를 냉각한다.[14] R-60 초기 모델 등 일부는 펠티어 열전 냉각기를 사용하기도 한다.

4. 1. 스캐닝 패턴 및 변조
초기 탐색기는 넓은 시야각(FOV)을 가져 표적을 정확히 추적하기 어려웠다. 이를 위해 망원경을 사용해 FOV를 좁혔으나, 너무 좁으면 표적을 놓칠 수 있었다.이 문제를 해결하기 위해 여러 스캐닝 패턴이 개발되었다. 초기에는 선형 스캔 방식이 사용되었는데, 수직 및 수평 슬릿을 움직여 표적 위치를 결정하는 방식이었다. 그러나 이 방식은 슬릿 크기에 따라 정확도가 제한되었다.
더 발전된 방식은 스핀 스캔(회전 주사) 방식이다. 회전하는 레티클(불투명 세그먼트가 있는 투명판)을 사용하여 표적 이미지를 주기적으로 차단(초핑)한다. 레티클 회전과 표적 이미지 차단 시간을 비교하여 표적 위치를 파악한다. 아사히 레티클(rising sun reticle)은 초기 스핀 스캔 방식에 사용된 레티클 중 하나로, 표면 절반은 50% 투과율, 나머지 절반은 투명 및 불투명 쐐기형이 번갈아 나타나는 형태였다.[4] 바퀴 레티클(wagon wheel reticle)은 더 복잡한 형태로, 레티클을 고정하고 광학계를 회전시켜 원추 주사 패턴을 만들어 주파수 변조 신호를 얻는 방식이다.[4]
4. 1. 1. 함부르크 시스템
함부르크 시스템에서 레티클은 절반은 검은색으로, 나머지 절반은 투명하게 제작되었다.[4]센서에서 보았을 때 시계 방향으로 회전하는 디스크를 기준으로 설명하면, 검은색과 투명한 부분 사이의 선이 수평을 이루고 투명한 면이 위쪽에 있는 회전 지점을 12시 위치라고 가정한다. 광전지는 디스크 뒤의 12시 위치에 배치된다.[4]
표적이 미사일 바로 위에 있으면, 센서는 초퍼의 투명한 부분이 9시 위치에 있을 때 표적을 감지하기 시작하여, 초퍼가 12시 위치에서 표적과 수직으로 정렬될 때 표적이 보이게 된다. 센서는 초퍼가 3시 위치에 도달할 때까지 표적을 계속 감지한다.[4]
신호 발생기는 디스크의 회전 속도와 동일한 주파수를 가진 AC 파형을 생성한다. 이 파형은 12시 위치에서 최대 양의 전압 지점에 도달하도록 조정된다. 따라서 표적이 센서에 보이는 동안 AC 파형은 양의 전압 기간에 있으며, 0에서 최댓값까지 변화했다가 다시 0으로 돌아온다.[4]
표적이 사라지면, 센서는 AC 신호의 출력을 반전시키는 스위치를 작동시킨다. 예를 들어, 디스크가 3시 위치에 도달하여 표적이 사라지면 스위치가 작동된다. 이때는 원래 AC 파형이 음의 전압 부분을 시작하는 순간이므로, 스위치는 이것을 다시 양으로 반전시킨다. 디스크가 9시 위치에 도달하면 셀은 다시 전환하며, 더 이상 신호를 반전시키지 않고, 신호는 다시 양의 위상으로 들어간다. 이 셀에서 나오는 결과 출력은 일련의 반 사인파로, 항상 양의 값을 가진다. 이 신호는 부드럽게 처리되어 DC 출력을 생성하고, 이 DC 출력은 제어 시스템으로 전송되어 미사일에게 위로 향하라는 명령을 내린다.[4]
3시 위치에 두 번째 셀을 배치하면 시스템이 완성된다. 이 경우, 스위칭은 9시와 3시 위치가 아닌 12시와 6시 위치에서 발생한다. 동일한 표적을 고려할 때, 이 경우 파형은 12시에 최대 양의 지점에 도달했을 때 음수로 전환된다. 회전 주기를 따라 이 과정을 거치면 일련의 잘린 양의 및 음의 사인파가 발생한다. 이것이 동일한 스무딩 시스템을 통과하면 출력은 0이 된다. 이는 미사일이 좌우로 수정할 필요가 없음을 의미한다. 예를 들어, 표적이 오른쪽으로 이동하면 스무더에서 나오는 신호가 점점 더 양수가 되어 오른쪽으로의 수정이 증가함을 나타낸다. 실제로 두 번째 광전지는 필요하지 않으며, 대신 전기적 지연 또는 첫 번째 신호와 90도 위상차가 나는 두 번째 참조 신호를 사용하여 두 신호를 단일 광전지에서 추출할 수 있다.[4]
이 시스템은 시계 면을 기준으로 한 각도인 ''방위''에는 민감한 신호를 생성하지만, 표적과 미사일 중심선 사이의 각도인 ''각도 오프''(또는 ''각도 오차'')에는 민감하지 않다. 이는 표적이 미사일에 비해 매우 느리게 움직이고 미사일이 표적에 빠르게 정렬되는 대함 미사일에는 필요하지 않았다. 속도가 더 빠르고 더 부드러운 제어 움직임이 필요한 공대공 사용에는 적합하지 않았다. 이 경우, 시스템은 약간 변경되어 변조 디스크가 심장형으로 패턴화되어 중심선에서 얼마나 멀리 떨어져 있는지에 따라 신호를 더 많거나 적게 차단했다. 다른 시스템은 동일한 결과를 얻기 위해 반경 방향 슬릿이 있는 두 번째 스캐닝 디스크를 사용하여 두 번째 출력 회로를 사용했다.[4]
4. 1. 2. 후기 개념
AEG는 전쟁 중 더 발전된 시스템을 개발했으며, 이는 대부분의 전후 실험의 기반이 되었다. 이 시스템은 디스크를 사용하여 일련의 불투명 영역을 패턴화했는데, 주로 피자 조각 모양과 유사한 방사형 줄무늬로 나타났다. ''함부르크''와 마찬가지로 디스크의 회전 주파수와 일치하는 교류 신호가 생성되었다. 그러나 이 신호는 각도에 따라 켜지거나 꺼지는 것이 아니라 매우 빠르게 지속적으로 트리거되었다. 이는 일련의 펄스를 생성하여 테스트 신호와 동일한 주파수를 갖는 두 번째 교류 신호로 평활화되었지만, 그 위상은 디스크에 대한 표적의 실제 위치에 따라 제어되었다. 두 신호의 위상을 비교함으로써 수직 및 수평 보정 모두 단일 신호로부터 결정될 수 있었다. 사이드와인더 프로그램에서는 출력을 조종사의 헤드셋으로 전달하여 탐색기에 표적이 보이는 것을 나타내는 ''미사일 톤''으로 알려진 으르렁거리는 소리를 내는 등 크게 개선되었다.4. 1. 3. 원뿔 주사 (Conical Scan)
원뿔 주사 방식은 고정된 레티클과 회전하는 이차 반사경을 사용하여 표적 이미지가 레티클 주위를 원형으로 회전하게 하는 방식이다.기본적인 회전 주사(spin-scan) 개념을 개선한 것이 원뿔 주사(conical scan)이다. 이 방식에서는 고정된 레티클이 검출기 앞에 위치하며, 둘 다 작은 카세그레인 반사경 망원경의 초점에 배치된다. 망원경의 이차 반사경은 약간 기울어진 축을 향해 회전한다. 이렇게 하면 레티클 자체가 회전하는 대신, 표적의 이미지가 레티클 주위로 원을 그리며 회전하게 된다.
예를 들어, 탐색기의 거울이 5도 기울어져 있고, 미사일이 현재 미사일 정면에 중심이 있는 표적을 추적하는 경우를 생각해 보자. 거울이 회전함에 따라 표적의 이미지는 반대 방향으로 반사되므로, 이 경우 이미지는 레티클 중심선에서 5도 떨어진 원을 그리며 움직인다. 즉, 중심에 있는 표적조차도 레티클의 표식을 지나갈 때 신호가 변동하게 된다. 바로 이 순간, 회전 주사 시스템은 중심 무효점에서 일정한 출력을 생성할 것이다. 플레어는 여전히 콘 스캔 탐색기에 의해 감지되어 혼란을 일으키지만, 플레어가 무효점을 벗어날 때 회전 주사의 경우처럼 더 이상 표적 신호를 압도하지 못할 것이다.
표적의 방위각 추출은 회전 주사 시스템과 동일한 방식으로 진행되며, 출력 신호를 거울을 회전시키는 모터에서 생성된 기준 신호와 비교한다. 그러나 각도 오프를 추출하는 것은 다소 더 복잡하다. 회전 주사 시스템에서는 펄스 사이의 시간 길이가 출력 신호 강도를 증가 또는 감소시켜 각도를 인코딩한다. 이것은 이미지(표적)가 항상 레티클의 중심에 대략 위치하는 콘 스캔 시스템에서는 발생하지 않는다. 대신, 하나의 주사 사이클 동안 펄스가 변화하는 방식이 각도를 나타낸다.
중심선에서 10도 왼쪽으로 떨어진 표적을 생각해 보자. 거울이 왼쪽을 향할 때 표적은 거울의 중심에 가깝게 보이며, 따라서 레티클 중심선에서 5도 왼쪽으로 이미지를 투사한다. 거울이 똑바로 위를 향하도록 회전하면 표적의 상대 각도는 0이 되므로 이미지는 중심선에서 5도 아래로 나타나고, 오른쪽을 향하면 15도 왼쪽으로 나타난다.
레티클의 각도 오프가 출력 펄스 길이를 변화시키기 때문에, 이 신호가 믹서로 전송되는 결과는 주파수 변조(FM)되어 회전 사이클 동안 증가하고 감소한다. 그런 다음 이 정보는 유도를 위해 제어 시스템에서 추출된다. 콘 스캔 시스템의 주요 장점 중 하나는 FM 신호가 각도 오프에 비례하므로 제어 표면을 부드럽게 이동시키는 간단한 솔루션을 제공하여 훨씬 더 효율적인 공기역학을 얻을 수 있다는 것이다. 이것은 또한 정확도를 크게 향상시킨다. 표적에 접근하는 회전 주사 미사일은 표적이 중심선 안팎으로 움직임에 따라 지속적인 신호를 받게 되어, 뱅뱅 제어가 미사일을 격렬하게 수정하도록 지시하는 반면, 콘 스캔의 FM 신호는 이러한 영향을 제거하고 원형 공산 오차(CEP)를 1미터까지 향상시킨다.
대부분의 콘 스캔 시스템은 표적 이미지를 레티클 가장자리에 최대한 가깝게 유지하려고 시도하는데, 이는 표적이 움직일 때 출력 신호의 가장 큰 변화를 일으키기 때문이다. 그러나 이것은 또한 거울이 표적에서 멀리 떨어져 있을 때 표적이 레티클에서 완전히 벗어나는 원인이 되기도 한다. 이를 해결하기 위해 레티클의 중심은 50% 투과 패턴으로 칠해져, 이미지가 이를 가로지를 때 출력이 고정된다. 그러나 거울이 움직이기 때문에 이 기간은 짧고, 거울이 다시 표적을 향하기 시작하면 정상적인 중단된 주사가 시작된다. 탐색기는 이미지가 이 영역에 있는지 알 수 있는데, 이는 이미지가 탐색기를 완전히 벗어나 신호가 사라지는 지점의 정반대 지점에서 발생하기 때문이다. 이 지점을 통과하는 것으로 알려진 신호를 검사함으로써 회전 주사 탐색기와 동일한 AM 신호가 생성된다. 따라서 추가 전자 장치와 타이머를 사용하는 비용으로 콘 스캔 시스템은 표적이 축에서 벗어난 경우에도 추적을 유지할 수 있으며, 이는 회전 주사 시스템의 제한된 시야에 비해 또 다른 주요 장점이다.
4. 1. 4. 교차 배열 탐색기 (Crossed Array Seekers)
교차 배열 탐색기는 콘 스캔 시스템의 레티클 작용을 시뮬레이션하기 위해 네 개의 직사각형 탐지기를 십자(+) 모양으로 배열한다.기존 광전지는 보통 둥글지만, 반도체 제조 기술의 발전으로 어떤 형태로든 제작할 수 있게 되었다. 교차 배열 시스템에서는 네 개의 직사각형 탐지기가 십자(+) 모양으로 배열된다. 스캔은 콘 스캔과 동일하게 수행되어, 목표물 이미지가 각 탐지기를 차례로 스캔한다.
시야(FOV) 중심에 목표물이 있으면, 이미지가 탐지기 주위를 돌면서 각 탐지기를 동일한 지점에서 교차한다. இதனால் 각 탐지기 신호는 특정 시점에 동일한 펄스 형태를 보인다. 목표물이 중심에 없으면, 이미지 경로는 오프셋된다. 이 경우, 분리된 탐지기 간 거리는 신호 재현 시점 사이 지연 시간을 다르게 만든다. 중심선에서 먼 이미지는 지연 시간이 길고, 가까운 이미지는 짧다. 거울에 연결된 회로는 이 추정 신호를 콘 스캔처럼 제어 신호로 생성한다. 탐지기 신호와 제어 신호를 비교하여 보정을 수행한다.
이 설계는 플레어 거부 성능을 크게 향상시킨다. 탐지기가 옆으로 얇아 망원경 거울 배열과 무관하게 매우 좁은 시야를 갖는다. 발사 시 목표 위치는 탐색기 메모리에 저장되고, 탐색기는 신호가 탐지기를 통과할 시점을 예측한다. 이후 제어 신호로 결정된 짧은 시간 외 도착 신호는 거부된다. 플레어는 방출 후 거의 즉시 공중에 멈춰 스캐너 게이트에서 빠르게 사라진다.
4. 1. 5. 로제트 탐색기 (Rosette Seekers)
로제트 탐색기(Rosette Seekers영어)는 두 개의 거울 또는 프리즘을 사용하여 로제트 곡선을 그리며 넓은 영역을 스캔하는 방식이다. 이를 통해 표적 이탈 가능성을 줄이고, 2D 이미지를 생성하여 플레어 등을 구별한다.4. 2. 이미징 시스템 (Imaging Systems)
현대 열 추적 미사일은 영상 적외선(IIR)을 사용한다. 여기서 IR/UV 센서는 초점면 배열을 통해 디지털 카메라의 전하 결합 소자(CCD)처럼 적외선 이미지를 생성한다. 이는 더 많은 신호 처리를 요구하지만, 정확도를 높이고 기만체에 대한 저항성을 강화한다. 플레어뿐만 아니라, 태양을 표적으로 오인하는 경우도 줄여준다. 고급 이미지 처리 기술을 활용하면, 목표물의 형태를 분석하여 미사일이 가장 취약한 지점을 타격하도록 유도할 수 있다.[21]AIM-9X 사이드와인더, ASRAAM과 같은 서방 단거리 공대공 미사일과 중국 PL-10, 대만 TC-1, 이스라엘 파이톤 5, 러시아 R-74M/M2도 영상 적외선 탐색기를 사용한다.
5. 대응책
적외선 유도 미사일을 무력화하는 방법에는 주로 플레어를 사용하거나, IR 재머(jammer)를 사용하는 두 가지 방법이 있다.
5. 1. 플레어 (Flares)
초기 탐색기는 넓은 시야각(FOV)을 가졌기 때문에 플레어와 같은 기만체에 취약했다. 플레어는 시야 내에 두 번째 신호를 생성하여 탐색기가 플레어를 표적으로 오인하게 만들었다.[24]이러한 문제에 대응하기 위해 여러 기술이 개발되었다.
- 이중 주파수 탐색기: 두 개의 다른 주파수 대역을 사용하여 표적과 플레어를 구별한다. 두 탐색기는 항공기와 배기구에 대해 다른 위치를 보지만, 플레어는 두 주파수에서 동일한 지점에 나타나므로 제거할 수 있다.
- 시네마틱 필터링: 교차 배열 및 로제트 탐색기와 같은 시스템에서 사용되는 기술이다. 매우 좁은 순간 시야(IFOV)를 사용하여 이미지를 생성하고, 스캔 간 표적 위치를 기억하여 빠르게 움직이는 물체(플레어)를 제거한다.[24]
- 이미징 시스템: 이미징 시스템은 각 표적의 크기를 직접 측정하여 작은 표적(플레어)을 제거하는 추가 기능을 제공한다.
5. 2. 재머 (Jammers)
초기 재머는 탄화 규소로 가열된 블록을 적외선 소스로 사용하고, 이를 회전 렌즈 세트로 둘러싸서 허위 신호를 방출했다. 이 방식은 탐색기의 타이밍 패턴을 방해하여 미사일을 무작위로 비행하게 만들었다.[1] 그러나 이 방식은 현대식 이미징 탐색기에는 효과가 떨어지는데, 재머가 표적과 같은 위치에서 신호를 보내 오히려 해로울 수 있기 때문이다.[1]
현대적인 레이저 기반 기술인 지향성 적외선 대응 수단(DIRCM)은 레이저를 미사일에 직접 조준하여 탐색기를 지속적으로 무력화한다. 이 방식은 현대식 이미징 탐색기에도 효과적이지만, 매우 비싸고 주로 기동성이 낮은 항공기에 적합하다.[1] 또한, 레이저 주파수를 미사일 탐색기에 맞게 조정하거나 범위를 스윕해야 하는 등 구현이 복잡하다.[1]
플레어나 AN/ALQ-144, 지향성 적외선 방해 장치, 광파 방해 기술 등으로 적외선 유도 미사일을 무력화할 수 있다.
6. 추적
대부분의 적외선 유도 미사일은 탐색기를 짐벌에 장착한다. 이를 통해 미사일이 표적을 향하지 않을 때에도 센서가 표적을 가리킬 수 있다. 이는 두 가지 주요 이유로 중요한데, 하나는 발사 전과 발사 중에 미사일이 항상 표적을 향할 수 없다는 것이다. 조종사나 운용자는 레이더, 헬멧 장착 조준경, 광학 조준경을 사용하거나, 항공기나 미사일 발사기의 기수를 표적에 직접 향하게 하여 탐색기가 표적을 향하도록 한다. 탐색기가 표적을 인지하면 운용자에게 알리고, 운용자는 탐색기를 "잠금 해제"하여 표적을 따라가게 한다. 이 시점 이후에는 항공기나 발사대가 움직여도 탐색기는 표적에 고정된 상태를 유지한다. 무기가 발사되면 모터가 점화되고 핀이 이동 방향을 제어할 수 있을 만큼 충분한 속도에 도달할 때까지는 미사일이 가리키는 방향을 제어하지 못할 수 있다. 그때까지 짐벌형 탐색기는 독립적으로 표적을 추적할 수 있어야 한다.
또한, 미사일이 표적을 요격하는 중에도 표적을 직접 가리키지 않을 수 있다. 표적이 발사대로부터 직선으로 다가오거나 멀어지는 것이 아니라면, 표적을 향해 곧바로 날아가는 것은 가장 짧은 요격 경로가 아닐 수 있다. 왜냐하면 표적이 미사일의 시야에서 측면으로 움직이기 때문이다. 초기의 열 추적 미사일은 단순히 표적을 쫓아갔기 때문에 비효율적이었다. 최신 미사일은 더 똑똑하며, 짐벌형 탐색기 헤드와 비례 유도를 결합하여 진동을 피하고 효율적인 요격 경로를 비행한다.
참조
[1]
서적
A Dictionary of Aviation
Osprey
1973
[2]
웹사이트
Large Aircraft Infrared Countermeasures-LAIRCM
http://www.440aw.afr[...]
2009-02-05
[3]
간행물
MULTISERVICE AIR-AIR, AIR-SURFACE, SURFACE-AIR BREVITY CODES
https://web.archive.[...]
Air Land Sea Application (ALSA) Center
2008-02-23
[4]
논문
Some Historical Aspects of Jagadls Chandra Bose's Microwave Research During 1895—1900
1979-02
[5]
서적
A Technological History of Motion Pictures and Television: An Anthology from the Pages of "The Journal of the Society of Motion Pictures and Television"
University of California Press
1967
[6]
서적
A Scientist's War: The War Diary of Sir Clifford Paterson, 1939-45
https://books.google[...]
IET
1991
[7]
서적
A History of Light and Colour Measurement: Science in the Shadows
https://books.google[...]
CRC Press
2001
[8]
서적
Bf 110 vs Lancaster: 1942-45
Osprey Publishing
2013
[9]
서적
No Place for Chivalry
Grub Street
2005
[10]
서적
German Automatic Rifles 1941-45
https://books.google[...]
Osprey
2013
[11]
논문
Dive Bomber
http://www.smithsoni[...]
2005-10
[12]
논문
Arming America's Interceptors: The Hughes Falcon Missile Family
http://www.ausairpow[...]
2015-09-14
[13]
서적
Dirty Little Secrets of the Vietnam War
Macmillan
2014
[14]
논문
Sidewinder
http://www.airspacem[...]
2015-09-11
[15]
백과사전
F-4E
US Air Force History Office, DIANE Publishing
[16]
서적
British Secret Projects: Hypersonics, Ramjets and Missiles
Midland
2007
[17]
논문
Matra R.511
1961-11-02
[18]
논문
ASRAAM - Europe's new dogfight missile
http://www.flightglo[...]
2015-10-09
[19]
논문
Naval Weapons Center AIM-95 Agile
1975-05-08
[20]
웹사이트
AA-11 ARCHER R-73
https://web.archive.[...]
Federation of American Scientists
2015-10-09
[21]
보고서
History of the Redeye Weapon System
https://web.archive.[...]
Historical Division, Army Missile Command
2015-09-11
[22]
문서
Jane's Land Based Air Defence 2005–2006
[23]
논문
The Campaign For The Caves: The Battles for Zhawar in the Soviet-Afghan War
https://web.archive.[...]
2001-09
[24]
웹사이트
"Стрела-2" (9К32, SA-7, Grail), переносный зенитный ракетный комплекс — ОРУЖИЕ РОССИИ, Информационное агентство
http://www.arms-expo[...]
Arms-expo.ru
2013-08-24
[25]
서적
Illustrated Directory of Special Forces
https://books.google[...]
Voyageur Press
2003-02-13
[26]
웹사이트
Stinger Missiles in Afghanistan
http://europaunivers[...]
2015-09-16
[27]
서적
Missile Flight Simulation
Lulu
2012
[28]
문서
Large Aircraft Infrared Countermeasures-LAIRCM
http://www.440aw.afr[...]
[29]
간행물
MULTISERVICE AIR-AIR, AIR-SURFACE, SURFACE-AIR BREVITY CODES
http://www.dtic.mil/[...]
Air Land Sea Application (ALSA) Center
2008-02-23
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com