마젤란 (우주선)
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
마젤란은 미국 항공우주국(NASA)이 1989년에 발사한 금성 탐사선으로, 16세기 탐험가 페르디난드 마젤란의 이름을 따 명명되었다. 이 우주선의 주요 임무는 고해상도 레이더 영상을 통해 금성 표면의 지형, 중력장, 지질 구조를 파악하는 것이었다. 마젤란은 보이저, 갈릴레오 등의 우주선 부품을 재활용하여 제작되었으며, 합성 개구 레이더(SAR)를 사용하여 금성 표면의 98%를 매핑하고, 중력장 측정, 대기 밀도 측정 등의 과학적 데이터를 수집했다. 1994년 임무 종료 시 금성 대기권으로 진입하여 소멸되었다.
1970년대 후반부터 과학자들은 금성 레이더 매핑 임무를 추진했다. 처음에는 '금성 궤도 영상 레이더(Venus Orbiting Imaging Radar, VOIR)'라는 이름의 우주선을 제작하려 했으나, 예산 제약으로 인해 1982년에 VOIR 임무는 취소되었다.
2. 역사
1983년, 태양계 탐사 위원회의 권고에 따라 단순화된 레이더 임무 제안이 '금성 레이더 매퍼 프로그램'으로 제출되어 채택되었다. 이 제안은 제한된 초점과 하나의 주요 과학 기기만을 포함하는 방향으로 수정되었다. 1985년, 이 임무는 16세기 포르투갈 탐험가 페르디난드 마젤란의 이름을 따서 '마젤란'으로 명명되었다.[3][4][5]
마젤란 임무의 주요 목표는 다음과 같다:[6]
마젤란 탐사선은 1989년 5월 4일 케네디 우주 센터에서 우주왕복선 아틀란티스(STS-30 미션)에 실려 발사되었다. 같은 날 아틀란티스 호에서 관성 상단 로켓(Inertial Upper Stage, IUS)에 의해 금성으로 보내졌다. 이는 우주왕복선을 이용한 최초의 행성 탐사선 발사였다.[27]
마젤란은 1990년 8월 10일 금성 궤도에 도착하여 극궤도에 진입했다. 이후 레이더를 이용해 금성 지형 관측 임무를 수행했으며, 1992년 9월까지 금성 전체 표면의 98%에 대한 관측을 완료했다. 1994년 9월에는 공력 제동(aerobraking) 실험을 통해 금성 대기를 이용한 감속을 시도했으며, 같은 해 10월 금성 대기권에 돌입하여 임무를 마치고 소멸했다.
3. 우주선 설계
우주선은 마틴 마리에타사에서 설계 및 제작했으며,[7] 제트 추진 연구소(JPL)는 NASA를 대신하여 임무를 관리했다.[3] 휴즈 항공기 회사의 우주 및 통신 그룹은 우주선의 합성 개구 레이더를 설계하고 제작했다.[8]
비용 절감을 위해 ''마젤란'' 탐사선의 대부분은 비행 예비품 부품과 다른 우주선의 설계 요소를 재사용하여 만들어졌다:[9]
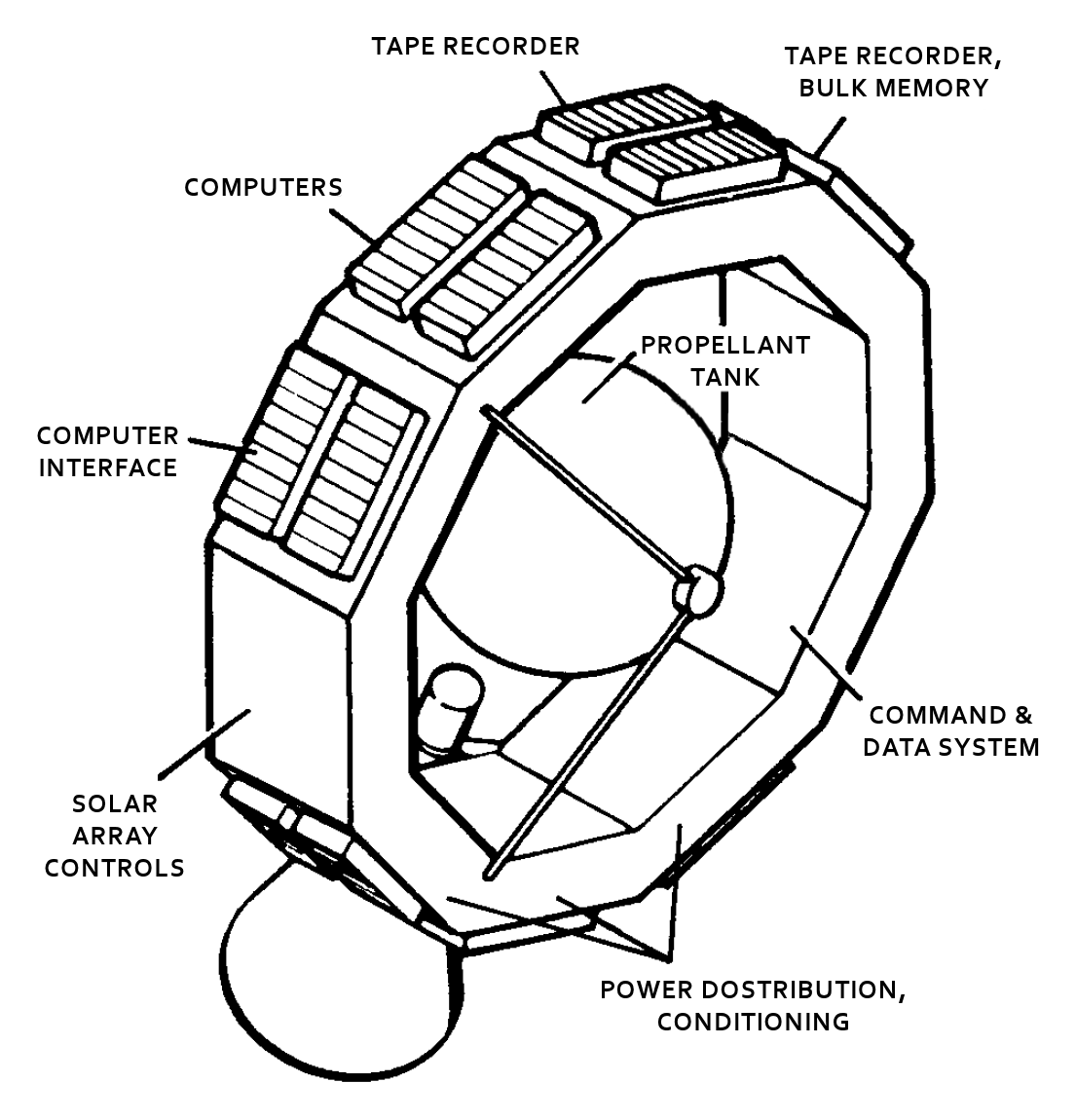
우주선의 주 몸체는 보이저 임무의 예비 부품인 10면체 알루미늄 버스였으며, 내부에는 컴퓨터, 데이터 기록 장치 및 기타 서브 시스템이 포함되었다. 우주선의 높이는 6.4m, 지름은 4.6m였고, 전체 무게는 3445kg이었다.[1]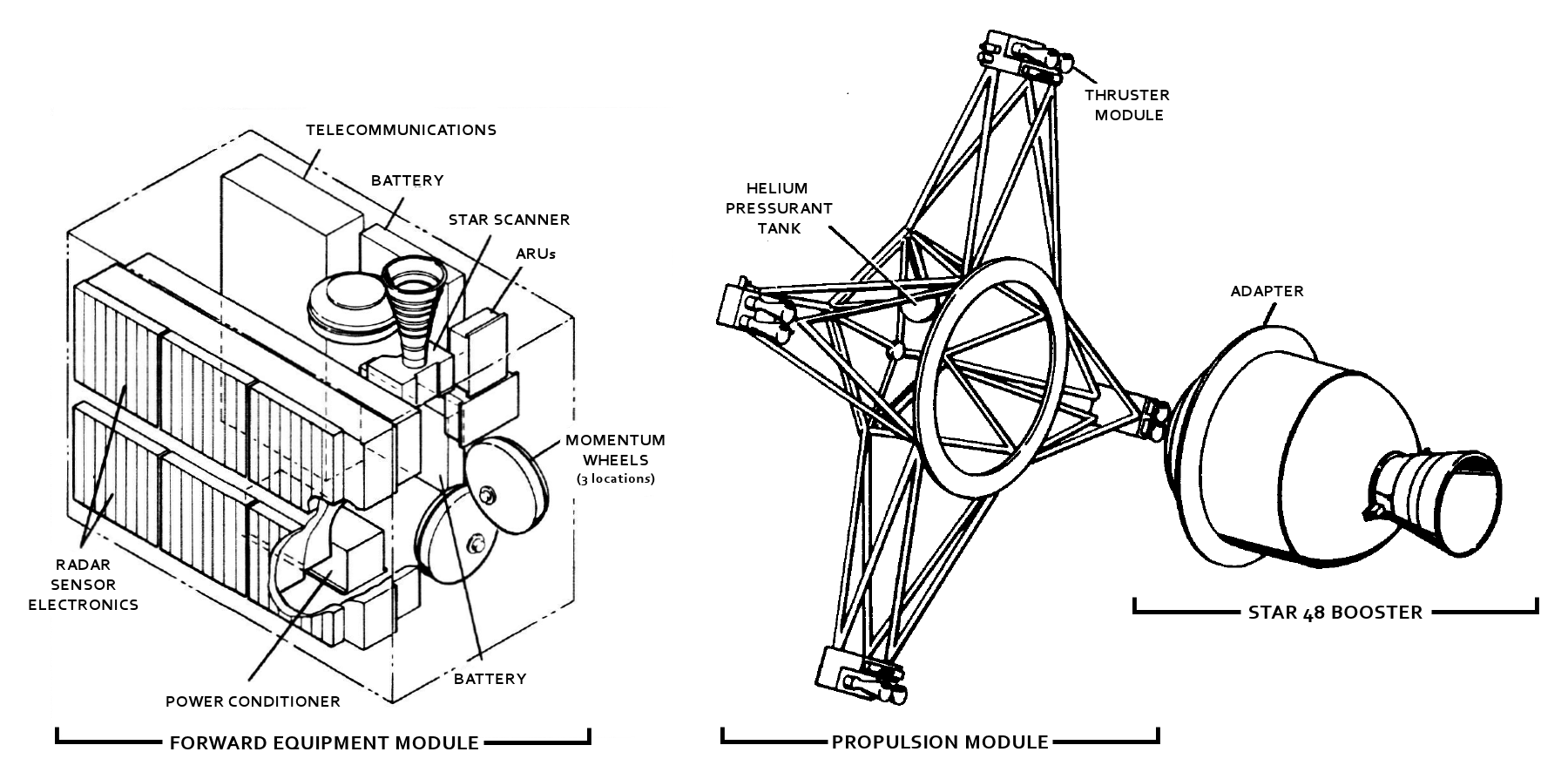
우주선의 자세 제어(방향)는 3축 안정화 방식으로 설계되었다. 이는 금성 궤도 진입에 사용된 강력한 Star 48B 고체 로켓 모터(SRM) 발사 중에도 유지되어야 했다. 이전까지 SRM을 사용하는 우주선은 발사 중 회전을 통해 안정성을 확보했지만, ''마젤란''은 설계상 회전에 적합하지 않았다. 따라서 회전 없이도 SRM의 추력(발사 직후 약 89 kN)으로 인해 발생할 수 있는 정렬 오차(최대 0.5% 오차 시 445 N의 측면 힘 발생 가능)를 제어해야 하는 까다로운 문제가 있었다.[10]
이 문제를 해결하기 위해, 실제 추진 시스템은 총 24개의 단일 추진제 하이드라진 추진기로 구성되었다. 이 추진기들은 71cm 직경의 티타늄 탱크 하나에 저장된 133kg의 정제된 하이드라진을 연료로 사용했다. 특히 중요한 금성 궤도 진입 시 445 N 추력기들의 최대 성능을 보장하기 위해, 주 탱크에 연결 가능한 외부 고압 헬륨 탱크도 추가로 탑재되었다. 우주선의 방향 제어에는 일련의 자이로스코프와 별 스캐너도 활용되었다.[4][5][11]
3. 1. 통신
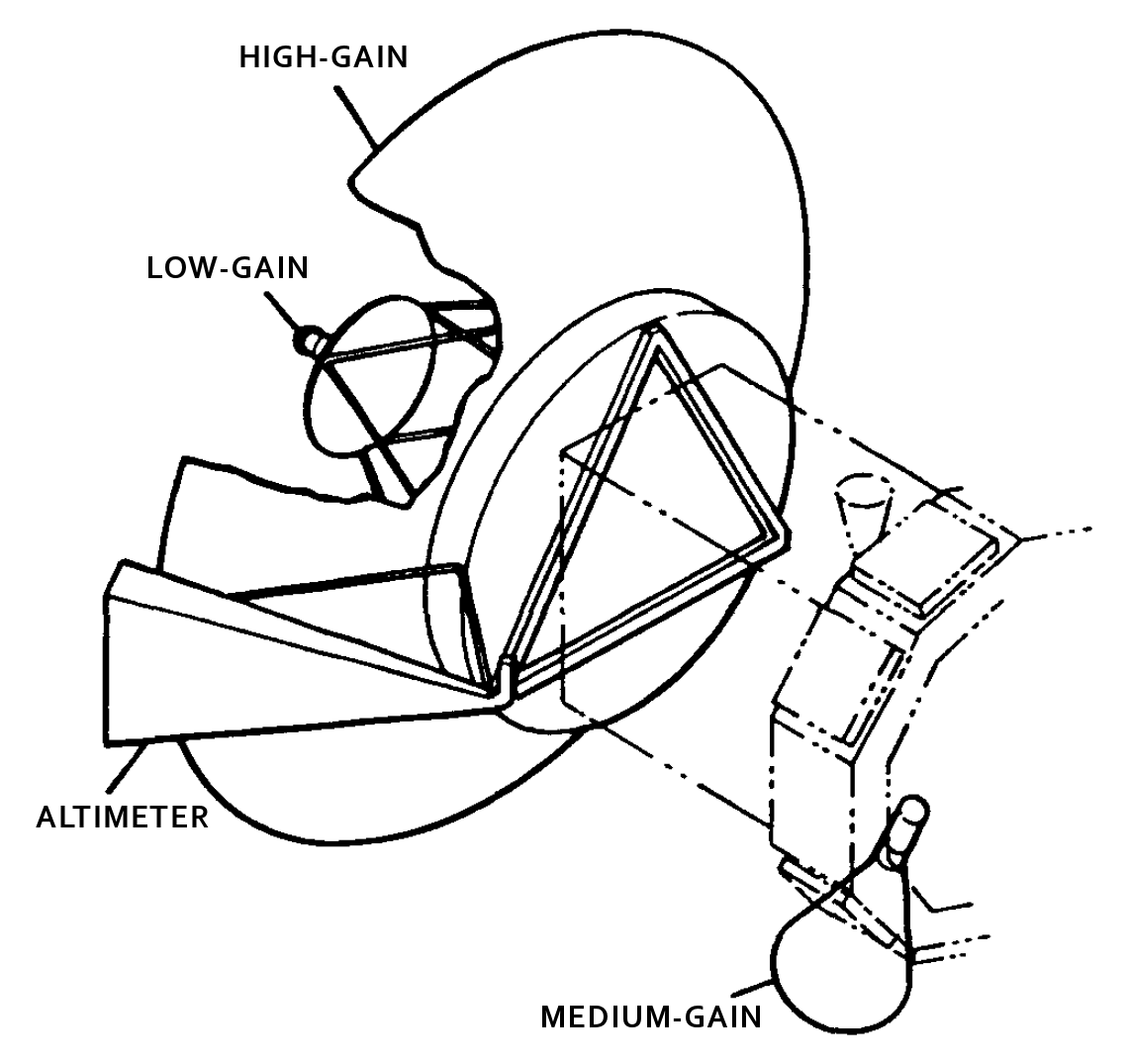
마젤란 우주선은 통신을 위해 세 종류의 안테나를 탑재했다. 주 안테나로는 보이저 계획에서 사용되었던 3.7m 크기의 경량 흑연/알루미늄 고이득 안테나가 사용되었고, 마리너 9호 임무에서 남은 중이득 안테나도 포함되었다. 또한, 비상 상황을 대비하여 고이득 안테나에 부착된 저이득 안테나도 갖추었다.
마젤란은 심우주 통신망(Deep Space Network, DSN)과 통신하며, S-대역을 이용하여 초당 1.2 킬로비트(kbps)의 속도로 지구로부터 명령을 수신하고, X-대역을 이용하여 초당 268.8 킬로비트(kbps)의 속도로 데이터를 지구로 전송할 수 있었다.
3. 2. 전력
''마젤란''은 각각 2.5m 크기의 두 개의 사각형 태양 전지판으로 전력을 공급받았다. 이 전지판들은 임무 초기에 총 1,200와트의 전력을 공급했다. 그러나 임무가 진행되면서 태양 전지판은 빈번하고 극심한 온도 변화로 인해 점차 성능이 저하되었다. 태양에서 가려져 우주선이 전력을 공급받을 수 없을 때를 대비하여 30 암페어시(amp-hour), 26셀의 니켈-카드뮴 배터리 두 개가 탑재되었다. 이 배터리는 우주선이 직사광선을 받으면 충전되었다.[4]
3. 3. 컴퓨터 및 데이터 처리
우주선의 컴퓨팅 시스템은 부분적으로 ''갈릴레오'' 우주선에서 사용된 장비를 수정하여 활용했다. 자세 제어 서브시스템에는 이중화 시스템으로 구성된 ATAC-16 컴퓨터 두 대가 탑재되었고, 명령 및 데이터 서브시스템(CDS) 제어를 위해서는 두 개의 이중화 시스템으로 구성된 네 개의 RCA 1802 마이크로프로세서가 사용되었다. CDS는 최대 3일 분량의 명령을 저장할 수 있었으며, 임무 운영자와의 통신이 두절되었을 때 문제가 발생하면 우주선을 자율적으로 제어하는 기능도 갖추었다.[9]
명령과 기록된 데이터를 저장하기 위해, 우주선에는 두 대의 멀티트랙 디지털 테이프 레코더가 포함되었다. 이 장치는 지구와의 통신이 복구되어 테이프 내용을 전송하기 전까지 최대 225 메가바이트의 데이터를 저장할 수 있었다.[4][11]
3. 4. 과학 장비
두껍고 불투명한 금성의 대기는 행성 표면을 매핑하기 위해 광학 측량 외에 다른 방법을 필요로 했다. 기존 레이더의 해상도는 안테나의 크기에 전적으로 의존하는데, 이는 비용, 발사체의 물리적 제약, 고해상도 데이터를 제공하기 위한 대형 장치의 복잡한 조작으로 인해 크게 제한된다. ''마젤란''은 지상 컴퓨터가 수집한 정보를 처리하여 대형 안테나를 모방하는 합성 개구라는 방법을 사용하여 이 문제를 해결했다.[14][12]
''마젤란''의 고이득 포물선 안테나는 천저점의 오른쪽 또는 왼쪽으로 28°–78° 기울어져 초당 수천 개의 마이크로파 펄스를 방출했다. 이 펄스는 구름을 통과해 금성 표면에 도달하여 넓은 토지 면적을 비췄다. 그런 다음 레이더 시스템은 암석, 절벽, 화산 및 기타 지질학적 특징의 측면에서 반사되는 각 펄스의 밝기를 후방 산란 형태로 기록했다. 이미징 해상도를 높이기 위해 ''마젤란''은 "룩(look|룩영어)"이라고 하는 여러 인스턴스 동안 특정 위치에 대한 일련의 데이터 버스트를 기록했다. 각 "룩"은 이전 룩과 약간 겹쳐서 우주선이 궤도를 이동하면서 동일한 위치에 대해 약간 다른 정보를 반환했다. 데이터를 지구로 전송한 후, 도플러 모델링을 사용하여 겹치는 "룩"을 결합하여 표면의 연속적이고 고해상도 이미지를 생성했다.[14][12][13]
; 레이더 시스템 ('''RDRS''')
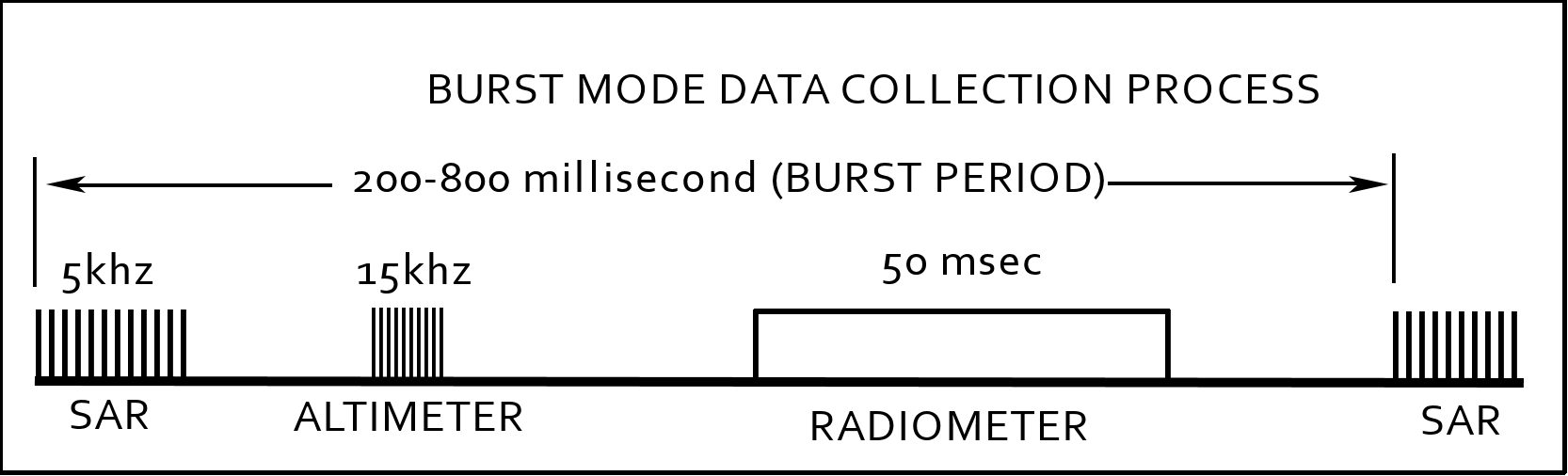
레이더 시스템(Radar System, RDRS)은 세 가지 모드, 즉 합성 개구 레이더 (SAR), 고도 측정 (ALT), 방사 측정 (RAD)으로 작동했다. 이 장비는 3.7m 포물선형 고이득 안테나와 바로 옆에 위치한 소형 팬 빔 안테나를 사용하여 금성의 표면 지질, 지형, 온도를 관찰하면서 세 가지 모드를 순환했다.
데이터는 초당 750킬로비트의 속도로 테이프 레코더에 수집되었으며, 나중에 지구로 전송되어 JPL이 운영하는 지상 컴퓨터 모음인 레이더 데이터 처리 서브시스템(RDPS)에 의해 사용 가능한 이미지로 처리되었다.[14][15][16][17]
4. 임무 프로필
탐사선 이름은 포르투갈의 탐험가 페르디난드 마젤란의 이름을 따서 명명되었다.[27] 마젤란은 레이더 데이터 외에도 금성의 중력장 정밀 측정,[18] 대기 밀도 측정, 전파 엄폐 데이터를 이용한 대기 프로파일 분석 등 다양한 과학적 측정 임무를 수행했다.
원래 마젤란은 1988년에 6개월이 걸리는 단기 궤도로 발사될 예정이었다. 그러나 1986년 우주왕복선 ''챌린저''호 폭발 사고로 인해 ''갈릴레오'' 탐사선을 포함한 여러 임무와 함께 발사가 연기되었다. 또한, 안전 문제로 기존에 계획되었던 강력한 액체 연료 기반의 켄타우루스 G 상단 로켓 대신, 상대적으로 추력이 약한 고체 연료 기반의 관성 상단 로켓(IUS)을 사용하도록 설계가 변경되었다. 여기에 더해, 1989년 10월 발사가 예정되었던 목성 탐사선 ''갈릴레오''의 일정을 확보하기 위해 마젤란의 발사 계획은 다시 조정되었다. 그 결과, 1989년 5월에 발사하여 금성까지 1년 3개월이 소요되는 긴 경로(Type IV 태양 중심 궤도)를 이용하는 것으로 결정되었다.
마젤란은 1989년 5월 4일 18시 46분 59초(UTC)에 미국 항공우주국(NASA)에 의해 플로리다주 케네디 우주 센터 발사 단지 39B에서 우주왕복선 ''아틀란티스'' (STS-30 임무)에 실려 발사되었다. 이는 우주왕복선을 이용한 최초의 행성 탐사선 발사였다.[27] 지구 궤도에 도달한 후, 마젤란과 부착된 관성 상단 로켓은 ''아틀란티스''호에서 분리되었고, 1989년 5월 5일 01시 06분 00초(UTC)에 IUS가 점화되어 마젤란을 태양 중심 궤도로 보냈다. 마젤란은 이 궤도를 따라 태양 주위를 1.5번 공전한 후, 발사 15개월 만인 1990년 8월 10일에 금성에 도착했다.
금성에 도착한 마젤란은 궤도 진입 기동을 통해 근점 고도 295km, 원점 고도 7762km, 공전 주기 3시간 9분의 타원 궤도에 성공적으로 진입했다.[11] 이 극궤도에서 마젤란은 약 4년간 금성 표면을 관측하는 임무를 수행했으며, 특히 레이더를 이용해 상세한 지형 지도를 작성했다. 여러 차례의 매핑 주기를 통해 금성 표면의 98% 이상을 관측하는 성과를 거두었다. 이후 공력 브레이크 실험 등을 수행한 뒤, 1994년 10월 13일 계획대로 금성 대기권에 돌입하여 연소하며 임무를 종료했다.[11]

4. 1. 매핑 주기
마젤란 우주선은 1990년 8월 10일 금성 궤도에 성공적으로 진입하며 본격적인 탐사 임무를 시작했다. 이후 약 4년 동안 총 6번의 매핑 주기를 거치며 금성 표면을 관측했다. 초기 주기(1~3)에서는 고해상도 레이더 이미지를 촬영하고 표면의 입체 영상 데이터를 수집하는 데 집중했으며, 이를 통해 금성 표면의 98% 이상을 상세하게 지도화했다. 후반 주기(4~6)에서는 공기 제동 기술을 시험하고 이를 이용해 궤도를 조정한 뒤, 금성의 중력장을 정밀하게 측정하는 데 주력했다. 마지막 주기에는 "풍차 실험"을 통해 금성 대기권 상층부에 대한 데이터를 수집하기도 했다. 마젤란 임무는 1994년 10월 13일, 계획된 대로 금성 대기권에 진입하여 연소하면서 종료되었다.[11][25]4. 1. 1. 매핑 주기 1
매핑 주기 1은 1990년 9월 15일부터 1991년 5월 15일까지 진행되었다.[6] 이 기간 동안의 주요 임무는 최소 1km/픽셀 해상도로 금성 표면의 70%를 "왼쪽 보기" 방식으로 지도를 만드는 것이었다. 매핑 주기 1 동안 마젤란 우주선의 고도는 북극에서 2000km에서 근지점 근처 290km까지 다양했다. 1991년 5월 15일, 1,792번의 궤도를 돌며 임무를 완료했을 때, 마젤란은 금성 표면의 약 83.7%를 101m에서 250m/픽셀의 해상도로 매핑하여 주요 목표를 완수했다.[11][20]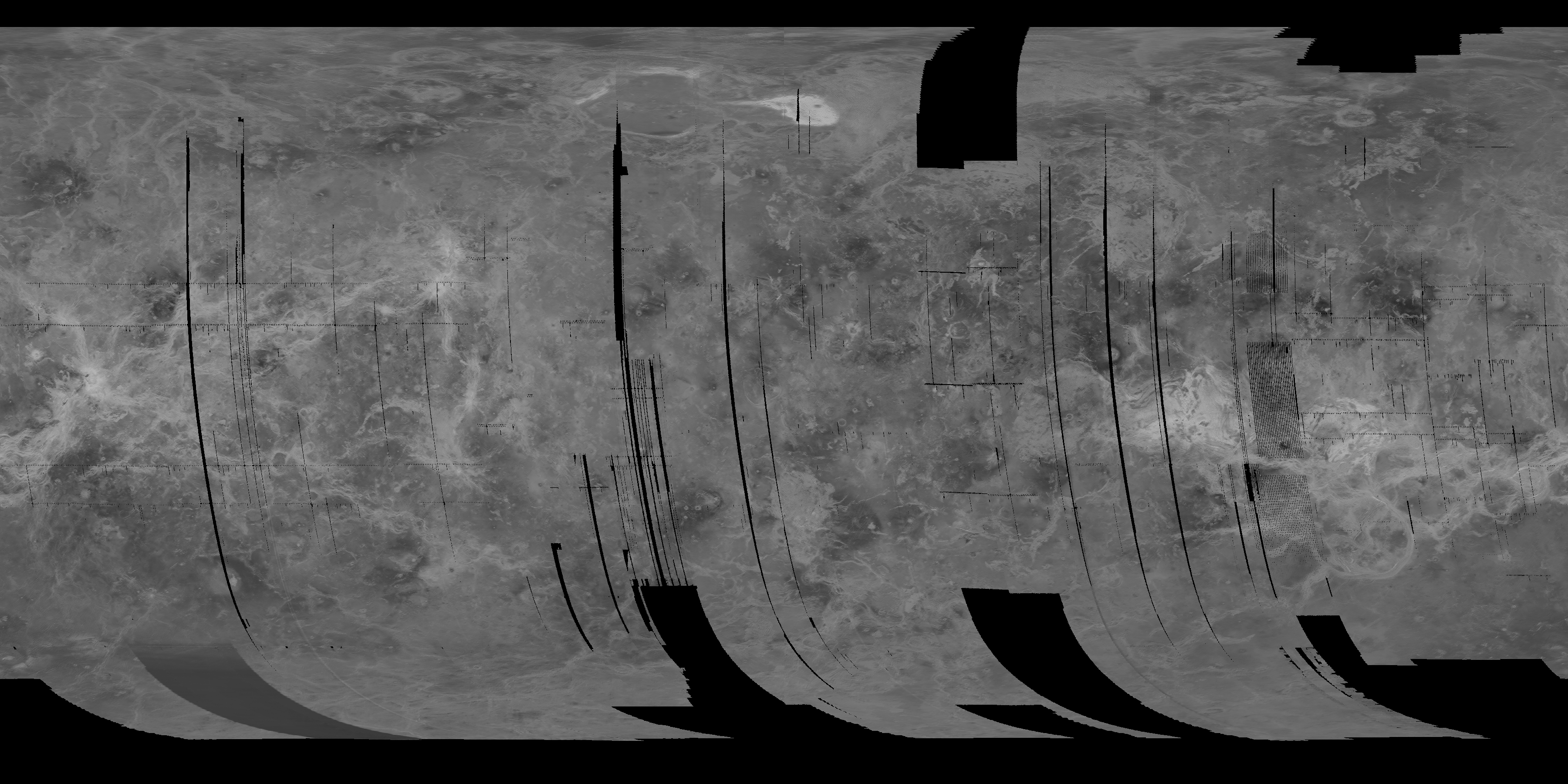
4. 1. 2. 매핑 주기 2
매핑 주기 2는 1991년 5월 15일부터 1992년 1월 14일까지 진행되었다. 이 주기의 주요 목표는 1주기 매핑에서 누락되었던 지역, 특히 남극 지역을 포함한 남반구의 상당 부분을 촬영하는 것이었다. 이를 위해 마젤란 탐사선은 데이터 수집 방식을 "우측 주시"로 변경하여 운영되었다. 1992년 1월 중순에 완료된 2주기 동안 금성 표면의 54.5%에 대한 데이터를 수집했으며, 이전 1주기의 데이터와 결합하여 금성 전체 표면의 96%를 포함하는 지도를 제작할 수 있었다.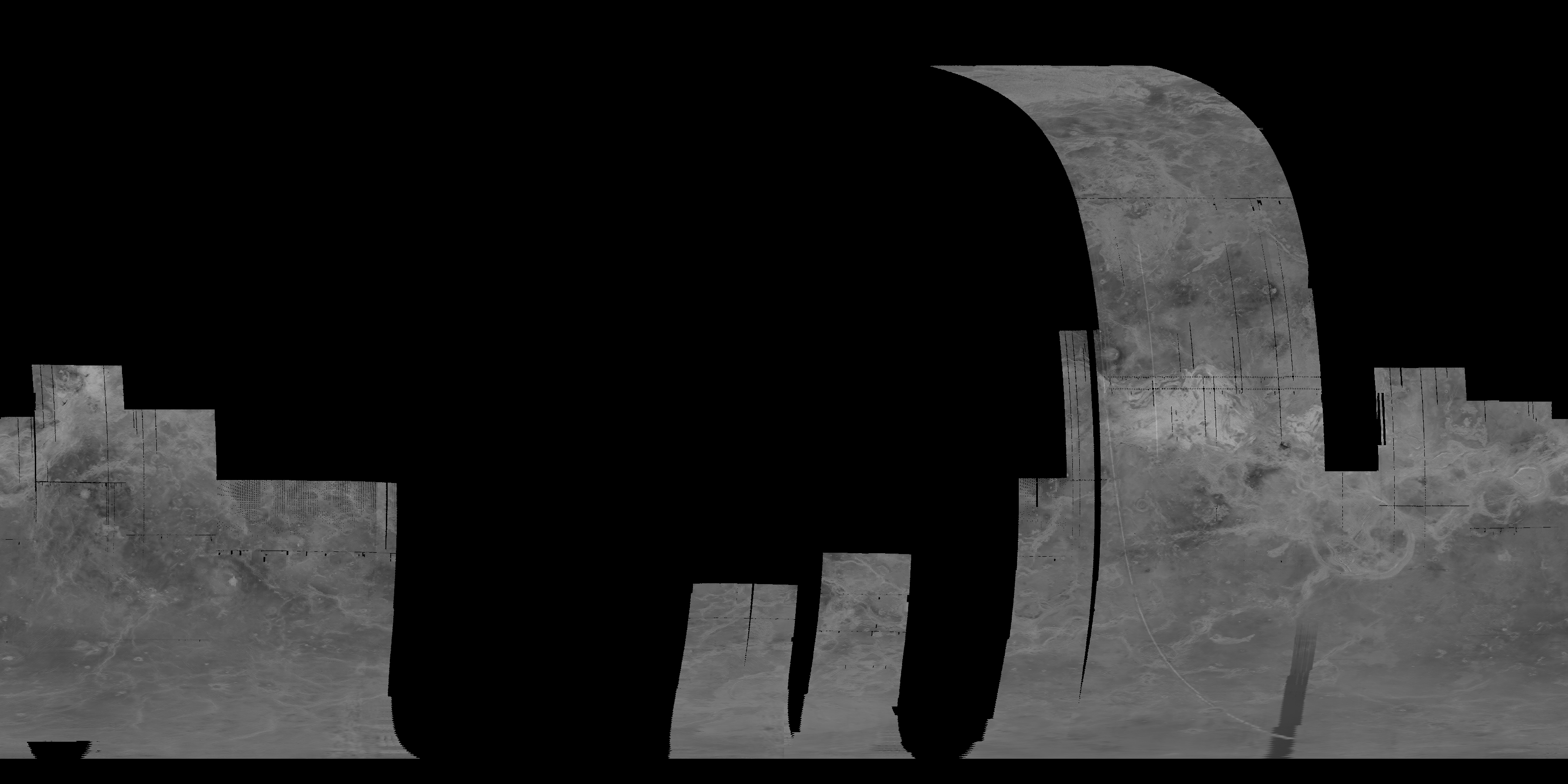
4. 1. 3. 매핑 주기 3
제2주기 직후 시작된 제3주기에서는 표면의 입체 영상 데이터 수집에 집중했다. 이 데이터는 지상 관제팀이 금성 표면의 3차원 렌더링 이미지를 만들고 분석하는 데 활용되었다. 1992년 9월 13일 제3주기가 종료될 무렵, 금성 표면의 약 21.3%가 입체 영상으로 촬영되었으며, 이로써 마젤란의 전체 표면 탐사 범위는 98%까지 확장되었다.[11][20]
4. 1. 4. 매핑 주기 4
1992년 9월 14일부터 1993년 5월 23일까지 진행된 매핑 주기 4의 주요 목표는 금성의 중력장을 측정하는 것이었다.[21] 이전 주기(사이클 3) 완료 후, 마젤란 (우주선)은 표면 영상 촬영을 중단했다. 대신 고이득 안테나를 지구 방향으로 계속 향하게 하여 심우주 통신망(Deep Space Network, DSN)이 지속적으로 원격 측정 신호를 수신하도록 했다.
DSN은 이 신호를 통해 우주선의 속도 변화를 정밀하게 추적했는데, 이는 금성의 중력장 변화에 대한 정보를 제공했다. 중력이 상대적으로 강한 지역을 지날 때 우주선의 속도가 미세하게 증가했고, 이 변화는 수신된 신호의 도플러 효과를 통해 감지되었다. 우주선은 1993년 5월 23일 주기가 끝날 때까지 총 1,878번의 궤도를 돌았다. 주기 초반에 발생한 데이터 손실 때문에 중력 연구는 예정보다 10일 더 연장되었다.[11][20]
4. 1. 5. 매핑 주기 5
매핑 주기 5는 1993년 5월 24일부터 1994년 8월 29일까지 진행되었다. 이 주기의 주된 목표는 공기 제동 기술을 이용하여 우주선의 궤도를 원형으로 만들고, 이를 통해 전 지구적인 중력 측정을 더 정밀하게 수행하는 것이었다.[21]1993년 5월, 4차 매핑 주기가 끝날 무렵 마젤란 탐사선의 궤도는 공기 제동 기술을 사용하여 원형 궤도로 조정되었다. 이 원형 궤도 덕분에 1993년 8월 3일에 시작된 5차 주기에서는 이전보다 훨씬 높은 해상도의 중력 데이터를 얻을 수 있었다. 5차 주기 동안 마젤란은 총 2,855번의 궤도를 돌았으며, 1994년 8월 29일 주기가 종료될 때까지 금성 표면의 94%에 해당하는 영역에 대한 고해상도 중력 데이터를 성공적으로 수집했다.[4][5][11][20]
4. 1. 6. 매핑 주기 6
여섯 번째이자 마지막 매핑 주기는 고해상도 중력 데이터를 수집하고 무선 과학 실험을 수행하는 것을 목표로 했다.[21] 이 주기는 1994년 4월 16일부터 1994년 10월 13일까지 진행되었다.이전 두 번의 매핑 주기에서 진행된 중력 연구를 계속 이어가는 한편, 주기 마지막에는 "풍차" 실험이라고 알려진 최종 실험이 수행되었다. 이 실험은 금성 대기권 상층부의 구성 성분에 대한 데이터를 얻기 위해 설계되었다. 마젤란 (우주선)은 1994년 10월 13일, 총 1,783번의 궤도를 완수한 후 금성 대기권으로 진입하여 연소하며 임무를 마쳤다.[11]
5. 임무 결과
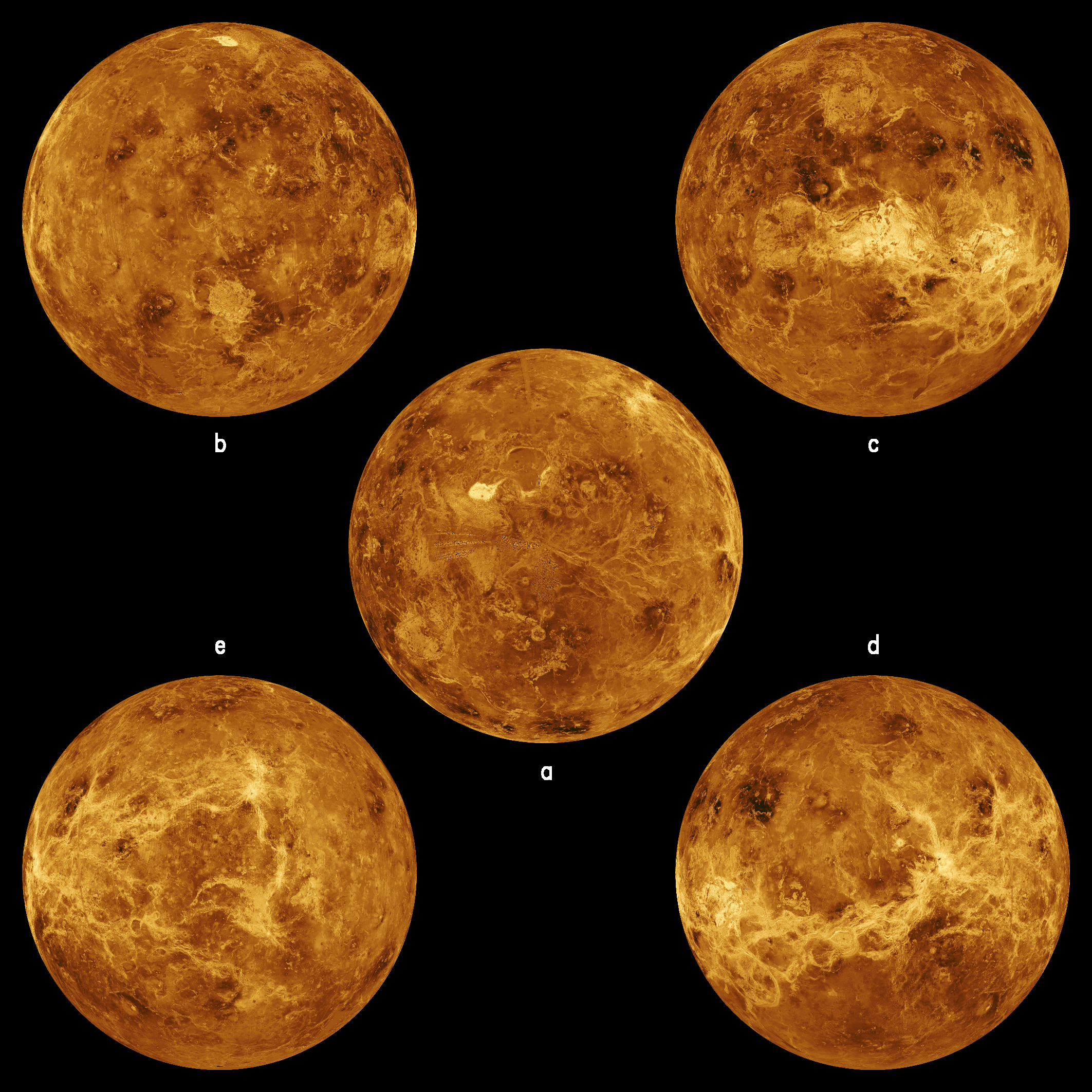
''마젤란'' 탐사선은 금성 표면에 대해 최초이자 당시까지 가장 상세한 고해상도 레이더 지도를 완성했다. 이는 이전 탐사 임무들이 대륙 크기의 대략적인 모습만 파악했던 것과 달리, 충돌구, 언덕, 능선 등 다양한 지질 구조를 마치 가시광선 사진처럼 명확하게 식별하고 분석하는 것을 가능하게 했다.
이 고해상도 지도는 금성 지질학 연구에 크게 기여했으며, 금성 표면을 형성한 화산 활동, 충돌 사건, 구조 지질학적 과정들에 대한 이해를 높이는 중요한 기초 자료가 되었다. ''마젤란''이 밝혀낸 구체적인 지질학적 특징들은 하위 섹션에서 더 자세히 다룬다.
''마젤란''의 지도는 현재까지도 가장 상세한 금성 전도이지만, 향후 발사될 NASA의 VERITAS와 로스코스모스의 베네라-D 탐사선은 더 발전된 레이더 기술을 통해 ''마젤란''보다 훨씬 높은 해상도의 지도를 제공할 것으로 기대된다. 두 탐사선은 2029년 발사를 목표로 하고 있다.

5. 1. 주요 발견
''마젤란'' 탐사선이 보내온 고해상도 레이더 영상은 금성 지질학 연구에 크게 기여했으며, 충돌, 화산 활동, 구조 지질학이 금성 표면 형성에 미친 영향을 이해하는 데 도움을 주었다.
금성 표면은 대부분 화산 활동으로 형성된 물질로 덮여 있다. 넓게 펼쳐진 용암 평원, 작은 용암 돔, 거대한 순상 화산과 같은 다양한 화산 지형이 흔하게 발견된다. 또한, 표면에는 충돌구(크레이터)가 상대적으로 적게 분포하는데, 이는 금성 표면의 지질학적 나이가 약 8억 년 미만으로 비교적 젊다는 것을 시사한다.
특히 길이가 6000km가 넘는 거대한 용암 채널의 존재는 과거 금성에서 매우 점성이 낮은 용암이 강물처럼 빠르게 흘러나오는 격렬한 화산 활동이 있었음을 보여준다. 팬케이크처럼 납작하고 둥근 모양의 거대한 화산 돔 지형도 발견되었는데, 이는 지각 암석이 복잡한 과정을 거쳐 만들어진 특별한 종류의 용암이 존재했음을 암시한다.
지구에서 볼 수 있는 판 구조론의 특징적인 증거인 대륙 이동이나 해저 확장과 같은 현상은 금성에서는 발견되지 않았다. 대신 금성의 구조 지질학은 전 지구적으로 분포하는 거대한 균열 지대(열곡대)와 '코로나'라고 불리는 독특한 지형에 의해 지배된다. 코로나는 맨틀 내부의 마그마가 상승하고 하강하면서 형성된 넓고 낮은 돔 형태의 구조물이다.
금성은 매우 두껍고 밀도가 높은 대기를 가지고 있지만, 표면에서는 바람에 의한 침식 작용이 활발하게 일어난 증거는 거의 발견되지 않았다. 단지 약간의 먼지와 모래가 바람에 의해 옮겨진 흔적만 확인될 뿐이다. 이는 얇은 대기를 가졌음에도 불구하고 바람에 의한 침식과 물질 이동이 활발한 화성과는 대조적인 모습이다.
''마젤란''은 금성 표면 전체에 대해 최초로 사진에 가까운 품질의 고해상도 레이더 지도를 만들었다. 이전 탐사 임무들이 대륙 크기의 지형만 파악할 수 있는 저해상도 지도를 만든 것에 비해, ''마젤란''은 충돌구, 언덕, 능선 등 세부적인 지질 구조를 명확하게 보여주어 다른 행성의 가시광선 사진 지도와 견줄 만한 수준의 분석을 가능하게 했다. ''마젤란''의 지도는 현재까지 가장 상세한 금성 지도이지만, 향후 발사될 NASA의 VERITAS와 로스코스모스의 베네라-D 탐사선은 더 높은 해상도의 레이더를 탑재하여 더욱 정밀한 관측을 수행할 예정이다. 두 탐사선 모두 2029년 발사를 목표로 하고 있다.
6. 임무 종료
1994년 9월 9일, ''마젤란''의 태양 전지판과 탑재 장비의 전력 출력이 저하되고 있었고, 모든 임무 목표를 성공적으로 완수했기 때문에 임무 종료가 공식 발표되었다. 임무는 10월 중순에 종료될 예정이었으며, 종료 절차는 1994년 8월 말부터 시작되었다. 일련의 궤도 조정 기동을 통해 우주선의 고도를 금성의 대기 가장 바깥쪽으로 낮추어, 1994년 9월 6일부터 2주간 '풍차 실험'(Windmill Experiment)을 수행했다. 이후 추가적인 궤도 조정으로 고도를 더 낮추며 최종 단계를 준비했다.[23]
1994년 10월 11일, 마지막 궤도 조정 기동을 통해 마젤란은 초당 7킬로미터의 속도로 금성 표면으로부터 139.7km 고도의 대기권으로 진입했다. 이 고도에서 발생하는 램 압력으로 인해 태양 전지판의 온도는 126°C까지 상승했다.[25][26]
1994년 10월 13일 10:05:00 UTC, 마젤란이 금성 뒤로 들어가면서 전파 엄폐 현상이 발생하여 통신이 두절되었다. 연구팀은 18:00:00 UTC까지 신호를 기다렸으나 수신되지 않아 임무가 종료된 것으로 최종 판단했다. 마젤란은 대기와의 마찰열로 대부분 증발했을 것으로 예상되지만, 일부 잔해는 20:00:00 UTC 경 금성 표면에 도달했을 것으로 추정된다.[25][20]
'''1994년 10월 13일 상황 보고서에서 인용'''[25]
''마젤란'' 우주선과의 통신은 10월 11일 화요일에 다섯 번의 공격적인 궤도 조정 기동(OTM)을 거쳐 금성의 상층 대기권으로 진입한 후, 수요일 아침 일찍 두절되었다. 종료 실험(9월의 "풍차" 실험 연장)은 전력 여유 부족으로 인해 우주선의 최종 손실을 초래할 것으로 예상되었다. 그러나 이는 문제가 되지 않았는데, 계속되는 태양 전지 손실로 인해 향후 몇 주 동안 우주선 전력이 너무 낮아 작동을 유지할 수 없었기 때문이다.
따라서 임무의 성과를 극대화하기 위해 최종 통제 실험이 설계되었다. 이 최종 저고도는 이산화탄소 대기의 영향을 연구하는 데 필수적이었다.
마지막 OTM은 근지점을 139.7km로 낮췄으며, 여기서 우주선에 대한 상당한 항력이 분명히 나타났다. 태양 전지판 온도는 126°C까지 상승했고, 자세 제어 시스템은 토크에 대응하기 위해 사용 가능한 모든 Y축 추진기를 발사했다. 그러나 자세 제어는 끝까지 유지되었다.
다섯 번의 궤도 이후 메인 버스 전압은 24.7볼트로 떨어졌으며, 전력이 24볼트 아래로 떨어지면 자세 제어가 손실될 것으로 예측되었다. 남은 궤도 동안 패널 각도를 변경하여 풍차 실험을 강화하기로 결정했다. 이것은 또한 사전 계획된 실험 옵션이었다.
이 시점에서 우주선은 단 두 번의 궤도만 생존할 것으로 예상되었다.
''마젤란''은 전력이 23볼트 아래로 계속 떨어지고 결국 20.4볼트에 도달했음에도 불구하고 세 번의 궤도 동안 통신을 유지했다. 이 시점에서 배터리 하나가 오프라인으로 전환되었고, 우주선은 전력 부족으로 정의되었다.
통신은 ''마젤란''이 15032번째 궤도에서 지구 엄폐에 들어가려던 시점인 오전 3시 2분(PDT)에 두절되었다. 연락은 재개되지 않았다. 추적 작업은 오전 11시까지 계속되었지만 신호는 감지되지 않았고, 예상되지도 않았다. 우주선은 1994년 10월 13일 목요일 오후 1시(PDT)까지 금성에 착륙할 것이다.
7. 과학자
마젤란 프로젝트는 탐사선이 보내온 초기 이미지와 데이터를 다양한 대학 및 기관의 수석 연구원 팀과 마젤란 프로젝트 과학 팀이 분석하고 연구하는 방식으로 진행되었다. 이 과학자들은 데이터의 유효성을 검증하고, 우주선의 데이터 수집 과정에 의견을 제시하며, 수집된 데이터를 해석하여 대중에게 공개하는 역할을 맡았다.
특히, 데이터는 세 명의 방문 소련 과학자(알렉산더 바실레프스키, 에파임 아킴, 알렉산더 자차로프)와 공유되었다. 이는 냉전이 막 종식되던 시점이었기에 당시 미 항공 우주국(NASA)에게는 이례적이고 민감한 결정이었으나 과학적 협력을 위해 이루어졌다.
마젤란 프로젝트 과학실은 금성 표면 이미지 데이터(FBIDR)의 긴 인쇄물을 방 벽 전체에 길게 이어 붙여 놓은 것으로 유명했다. 이는 우주선이 좁고 긴 띠 형태로 데이터를 수집했기 때문에, 금성 표면의 모습을 처음으로 시각화하는 방식이었다. 임무 수행 기간 동안 영국의 마거릿 대처 총리가 이곳을 방문하기도 했다.
초기 조사 단계를 거친 후, 마젤란 임무를 통해 얻은 모든 데이터는 대중에게 공개되었다.
마젤란 '''프로젝트 과학팀'''의 주요 구성원은 다음과 같다.
이들 외에도 여러 주요 연구자들과 3명의 소련 방문 과학자들이 임무의 과학 연구에 참여했다.
참조
[1]
웹사이트
Magellan
https://science.nasa[...]
NASA
2022-11-30
[2]
뉴스
Magellan data unveils ongoing volcanic activity on the surface of Venus
https://www.nasaspac[...]
2024-06-02
[3]
간행물
Magellan (Formerly VRM) Update
https://ntrs.nasa.go[...]
NASA / JPL
1986-03-24
[4]
서적
Magellan Venus Explorer's Guide
https://solarsystem.[...]
NASA / JPL
2011-02-22
[5]
서적
Hiatus and Renewal 1983–1996
https://cds.cern.ch/[...]
Springer Science+Business Media
[6]
웹사이트
Magellan
https://nssdc.gsfc.n[...]
NASA / National Space Science Data Center
2011-02-21
[7]
간행물
Venusian atmospheric and Magellan properties from attitude control data
https://ntrs.nasa.go[...]
NASA
1994-08
[8]
간행물
Synthetic Aperture Radar Instrument Shipped
https://www.jpl.nasa[...]
NASA & JPL
[9]
웹사이트
The Magellan Venus Explorer's Guide, Chapter 4: The Magellan Spacecraft
https://solarsystem.[...]
NASA / JPL
2020-10-18
[10]
웹사이트
Star 48B
http://www.astronaut[...]
[11]
간행물
Mission Information: Magellan
http://starbrite.jpl[...]
NASA / Planetary Data System
2011-02-20
[12]
서적
The Face of Venus: The Magellan Radar-Mapping Mission
https://ntrs.nasa.go[...]
NASA
2011-02-21
[13]
논문
Magellan: Radar Performance and Data Products
American Association for the Advancement of Science
1991-04-12
[14]
간행물
Magellan: The unveiling of Venus
https://ntrs.nasa.go[...]
NASA / JPL
1989-03
[15]
웹사이트
Synthetic Aperture Radar (SAR)
https://nssdc.gsfc.n[...]
NASA / National Space Science Data Center
2011-02-24
[16]
웹사이트
PDS Instrument Profile: Radar System
http://starbrite.jpl[...]
NASA / Planetary Data System
2011-02-27
[17]
논문
The Venus Radar Mapper Mission
Pergamon Journals Ltd
1987-02
[18]
논문
Evidence for Active Hotspots on Venus from Analysis of Magellan Gravity Data
[19]
간행물
Space Shuttle Mission STS-30 Press Kit
http://science.ksc.n[...]
NASA
2011-02-22
[20]
웹사이트
Magellan: Mission Plan
https://nssdc.gsfc.n[...]
NASA / JPL
2011-02-27
[21]
웹사이트
Magellan Mission at a Glance
http://www2.jpl.nasa[...]
NASA
2011-02-21
[22]
논문
The Magellan Venus mapping mission: Aerobraking operations
https://www.scienced[...]
1995-05-01
[23]
간행물
Magellan Begins Termination Activities
https://solarsystem.[...]
NASA / JPL
2011-02-22
[24]
간행물
Magellan Status Report
https://solarsystem.[...]
NASA / JPL
2011-02-22
[25]
간행물
Magellan Status Report
https://solarsystem.[...]
NASA / JPL
2011-02-22
[26]
간행물
Magellan Status Report
https://solarsystem.[...]
NASA / JPL
2011-02-22
[27]
웹사이트
金星探査機 あかつき - 海外の金星探査
https://www.stp.isas[...]
JAXA
2023-05-17
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com