관성항법장치
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
관성항법장치는 가속도계와 자이로스코프를 사용하여 물체의 위치와 방향을 추적하는 기술이다. 작동 원리는 가속도를 적분하여 속도를, 속도를 적분하여 거리를 계산하고, 자이로스코프로 방향을 감지하여 이동 거리와 방향의 벡터를 합성하는 것이다. 구성 요소로는 관성 측정 장치(IMU), 컴퓨터 등이 있으며, 짐벌식 자이로 안정 플랫폼, 유체 부유식 자이로 안정 플랫폼, 스트랩다운 시스템 등의 다양한 형태가 있다. 관성 항법 시스템은 오차가 발생할 수 있으며, 이를 보정하기 위해 GPS와 같은 다른 항법 시스템과 결합하여 사용하기도 한다. 항공기, 미사일, 우주선, 잠수함 등 군사 및 민간 분야에서 널리 사용되며, 최근에는 자율주행차, 드론, 로봇 등에도 활용되고 있다.

더 읽어볼만한 페이지
- 기술 시스템 - 글래스 콕핏
글래스 콕핏은 아날로그 계기판을 대체하는 디지털 조종석 시스템으로, 정보 집약 및 시인성 향상, 조작 편의성 증대, 안전성 강화, 사용자 정의 가능성을 특징으로 하며, 다양한 분야로 확산되고 있다. - 기술 시스템 - 테크놀로지
테크놀로지는 기술과 지식을 실용적으로 활용하여 인류 문명의 발전과 함께 경제 성장 및 삶의 질 향상에 기여했지만, 환경 오염, 사회적 불평등, 실존적 위험과 같은 문제점을 야기하며 윤리적, 철학적 논의를 필요로 한다. - 항행 안전 시설 - 로란
로란은 두 기지국 신호의 시간차를 측정하여 위치를 결정하는 장거리 무선 항법 시스템이며, 로란-A, 로란-C 등으로 발전하여 사용되다가, 현재는 eLORAN 기술을 통해 정확도를 개선하려는 시도가 이루어지고 있다. - 항행 안전 시설 - 계기착륙장치
계기착륙장치(ILS)는 악천후 속에서 항공기가 활주로로 안전하게 유도되도록 돕는 정밀 접근 시스템으로, 지상국 전파를 항공기가 수신하여 중심선과 강하 각도를 따라 접근하도록 하며, 로컬라이저, 글라이드 슬로프, 마커 비콘 등으로 구성되고, 설치 및 운영 정밀도에 따라 CAT I, CAT II, CAT III 등으로 분류된다. - 항법 장치 - 레이더
레이더는 전자기파를 발사하여 반사 신호를 분석하여 물체의 거리, 속도, 방향 정보를 얻는 기술이며, 송신기, 수신기, 안테나 등으로 구성되어 다양한 신호 방식을 사용하고, 기상, 항공, 해상, 군사 등 여러 분야에서 활용된다. - 항법 장치 - 나침반
나침반은 지구 자기장을 이용하여 방향을 지시하는 도구로, 자기 나침반 외에도 다양한 종류가 있으며, 항해, 탐험 등 여러 분야에서 사용되어 왔고 현대에도 널리 활용된다.

2. 작동 원리
관성 측정 장치(IMU)는 가속도계와 자이로스코프가 제공하는 측정을 통해 작동한다. IMU는 일반적으로 세 개의 직교 속도 자이로스코프와 세 개의 직교 가속도계를 포함하여 각속도와 선형 가속도를 각각 측정한다. 이러한 장치의 신호를 처리하여 장치의 위치와 방향을 추적할 수 있다.[22]
자이로스코프는 관성 기준 틀에 대한 센서 프레임의 각 변위를 측정한다. 관성 기준 틀에서 시스템의 원래 방향을 초기 조건으로 사용하여 각 변위를 적분하면 항상 시스템의 현재 방향을 알 수 있다. 가속도계는 움직이는 차량의 선형 가속도를 측정한다. 세 축(상하, 좌우, 전후)으로 움직일 수 있으므로 각 축에 대해 선형 가속도계가 있다.
컴퓨터는 차량의 현재 위치를 지속적으로 계산한다. 먼저, 6개의 자유도 (x, y, z 및 θx, θy 및 θz) 각각에 대해, 감지된 가속도와 중력 추정치를 시간에 따라 적분하여 현재 속도를 계산한다. 그런 다음 속도를 적분하여 현재 위치를 계산한다.
INS는 처음에 다른 소스(사람 조작자, GPS 위성 수신기 등)에서 초기 방향과 함께 위치 및 속도를 제공받은 후 모션 센서에서 수신된 정보를 통합하여 자체 업데이트된 위치와 속도를 계산한다. INS의 장점은 초기화된 후 위치, 방향, 또는 속도를 결정하기 위해 외부 참조가 필요하지 않다는 것이다.
INS는 가속도계로 감지하는 가속도를 적분하여 속도를, 속도를 적분하여 거리를 구한다. 한편, 자이로로 방향을 감지하고, 이동 거리와 방향의 벡터를 합성하여 기점으로부터의 이동 거리를 산출한다. 기점의 정지 위치를 입력하면, 이동을 시작한 후에도 자체 기기의 위치와 속도를 항상 계산하여 파악할 수 있다.[22]
하지만, 긴 거리를 이동하면 오차가 누적되어 커진다는 특징이 있으므로, 위성 항법 시스템 (GPS)이나 거리 측정 장치, 초단파 전방향 무선 표지에 의한 보정을 더하여 사용한다. 도플러 레이더 항법 장치, 무지향성 무선 표지, 천측 항법 등을 보조적으로 사용하는 경우도 있다.
구조로는, 기계식 자이로를 사용한 안정대(플랫폼) 위에 가속도계가 설치되어 있으며, 방향과 가속도를 감지하고, 내장된 컴퓨터가 자동으로 연속 계산하여 속도, 현재 위치, 진행 방향 등의 항법 정보를 출력한다.
최근에는 안정대에 사용되는 기계식 자이로를 레이저 자이로로 바꾸고, 자이로의 기계적인 회전 부분과 안정대를 없앤 스트랩다운 방식의 관성 기준 장치(IRS)가 항공기에서 개발되고 있다.
INS와 IRS의 근본적인 차이는 자이로의 구조가 아니라 항법 능력의 유무이며, 항법 능력을 갖지 않는 IRS는 비행 관리 장치 (FMS)와 조합하여 사용하며, 항법은 FMS가 담당한다.
2. 1. 좌표계
항법 시스템은 관성 좌표계와 기체 좌표계로부터 선형 및 각도 측정을 획득하고, 최종 자세와 위치를 NED 좌표계에서 계산한다.[22]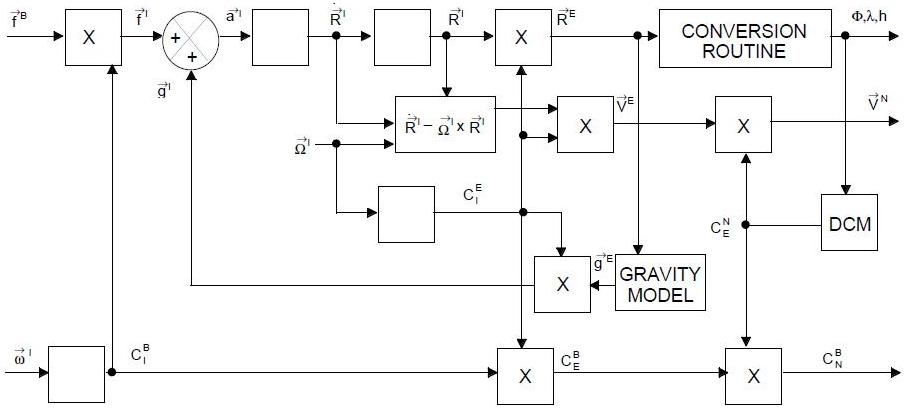
여기서 f는 비관성력, 는 각속도, a는 가속도, R은 위치, 과 V는 속도, 는 지구의 각속도, g는 중력 가속도이며, 및 h는 NED 위치 매개변수이다. E, I, B의 위첨자/아래첨자는 각각 지구 중심, 관성 또는 기체 좌표계의 변수를 나타내며, C는 좌표계 변환을 나타낸다.[22]
3. 구성 요소
관성 항법 장치(INS)는 컴퓨터, 가속도계, 자이로스코프 또는 기타 모션 감지 장치를 포함하는 플랫폼 또는 모듈이다. INS는 초기 위치와 속도를 외부 소스(예: GPS)로부터 제공받은 후, 자체 센서 정보를 통합하여 위치와 속도를 계산한다.[22]
각속도계는 차량의 회전(피치, 요, 롤)을 측정하고, 선형 가속도계는 차량의 비중력 가속도를 측정한다. 컴퓨터는 이 정보를 지속적으로 계산하여 현재 위치를 파악한다.
관성 유도 시스템은 미니트맨 미사일과 아폴로 계획에서 컴퓨터 소형화에 기여했으며, 현재는 위성 항법 시스템과 결합하여 오차를 수정하는 방식으로 사용된다. 지구 표면 근처에서는 슐러 조정을 통해 플랫폼이 지구 중심을 향하도록 유지한다.
INS는 가속도계로 감지하는 가속도를 적분하여 속도를, 속도를 적분하여 거리를 구하는 한편, 자이로로 방향을 감지하고, 이동 거리와 방향의 벡터를 합성하여 기점으로부터의 이동 거리를 산출한다.
악천후나 전파 방해에 영향을 받지 않지만, 오차가 누적되는 특징이 있어 GPS 등으로 보정하여 사용한다.[22]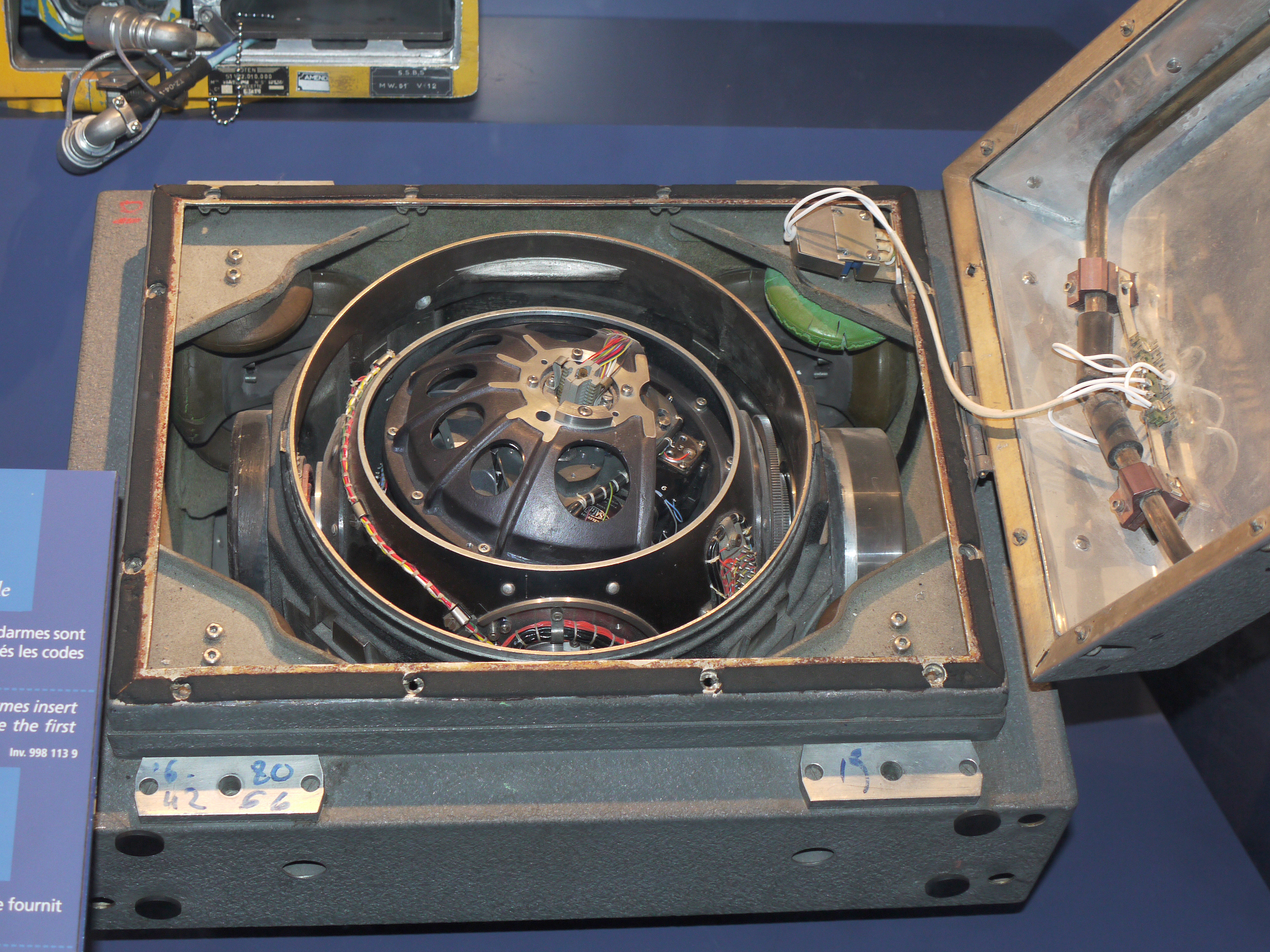

3. 1. 짐벌식 자이로 안정 플랫폼
일부 시스템은 선형 가속도계를 짐벌식 자이로 안정 플랫폼에 배치한다. 짐벌은 세 개의 고리로 구성되어 있으며, 각 고리에는 처음에는 직각을 이루는 한 쌍의 베어링이 있다. 이들은 플랫폼이 임의의 회전축을 중심으로 회전할 수 있도록 한다(또는 차량이 플랫폼 주위를 회전하는 동안 플랫폼이 동일한 방향을 유지하도록 한다). 플랫폼에는 보통 두 개의 자이로스코프가 있다.두 개의 자이로스코프는 자이로스코프 세차 운동(토크 입력에 직각으로 회전하려는 자이로스코프의 경향)을 상쇄하는 데 사용된다. 동일한 회전 관성으로 반대 방향으로 동일한 속도로 회전하는 한 쌍의 자이로스코프를 직각으로 장착하면 세차 운동이 상쇄되고 플랫폼은 회전을 방지한다.
이 시스템을 사용하면 차량의 롤, 피치 및 요 각도를 짐벌 베어링에서 직접 측정할 수 있다. 선형 가속도계의 방향이 바뀌지 않기 때문에 비교적 단순한 전자 회로를 사용하여 선형 가속도를 합산할 수 있다.
이 방식의 가장 큰 단점은 값비싼 정밀 기계 부품을 많이 사용한다는 것이다. 또한 마모되거나 잼이 발생할 수 있는 움직이는 부품이 있으며, 짐벌 록에 취약하다. 아폴로 우주선의 주 안내 시스템은 3축 자이로 안정 플랫폼을 사용하여 데이터를 아폴로 유도 컴퓨터에 공급했다. 짐벌 록을 피하기 위해 기동을 신중하게 계획해야 했다.[20][21]

3. 2. 유체 부유식 자이로 안정 플랫폼
유체 베어링 또는 부유 챔버를 사용하여 자이로 안정화 플랫폼을 장착한다. 이러한 시스템은 매우 높은 정밀도를 가질 수 있다(예: 고급 관성 기준 구체).[1]고급 시스템에서 각도 센서는 일반적으로 유연한 인쇄 회로 기판의 스트립으로 만들어진 특수 선형 가변 차동 변압기 코일이다. 여러 코일 스트립이 자이로 안정화 플랫폼의 구형 쉘 주위에 대원에 장착된다.[1] 플랫폼 외부의 전자 장치는 구형 플랫폼 주위에 감겨진 변압기에서 생성된 가변 자기장을 읽기 위해 유사한 스트립 모양의 변압기를 사용한다. 자기장이 모양을 변경하거나 이동할 때마다 외부 변압기 스트립의 코일 와이어가 절단된다. 절단은 외부 스트립 모양의 코일에 전류를 생성하고, 전자 장치는 해당 전류를 측정하여 각도를 도출할 수 있다.[1]
3. 3. 스트랩다운 시스템
가벼운 디지털 컴퓨터는 짐벌을 제거하여 센서가 단순히 차량에 고정되는 "스트랩다운" 시스템을 만든다. 이는 비용을 절감하고, 짐벌락을 제거하며, 신뢰성을 높인다.[22] "속도 자이로"라고 하는 각속도 센서는 차량의 각속도를 측정한다. 스트랩다운 시스템은 일반적으로 링 레이저 자이로스코프, 광섬유 자이로스코프 또는 반구형 공진기 자이로스코프를 기반으로 한다.[22]스트랩다운 시스템은 짐벌 시스템보다 수백 배 더 큰 동적 측정 범위를 필요로 한다. 즉, 조종, 롤 및 요에서 차량의 자세 변화뿐만 아니라 총 이동도 통합해야 한다. 짐벌 시스템은 일반적으로 50–60 Hz의 업데이트 속도로 잘 작동할 수 있지만, 스트랩다운 시스템은 약 2000 Hz로 업데이트된다. 더 높은 속도는 내비게이션 시스템이 각속도를 자세에 정확하게 통합하기 위해 필요하다.[22]
디지털 컴퓨터가 매우 저렴하고 빨라져 속도 자이로 시스템을 실제로 사용하고 대량 생산할 수 있게 되었다. 아폴로 달 착륙선은 백업 비상 유도 시스템(AGS)에 스트랩다운 시스템을 사용했다.[22]
스트랩다운 시스템은 오늘날 상업 및 군사 응용 분야(항공기, 선박, ROV, 미사일 등)에서 일반적으로 사용된다. 최첨단 스트랩다운 시스템은 링 레이저 자이로스코프, 광섬유 자이로스코프 또는 반구형 공진기 자이로스코프를 기반으로 하며, 디지털 전자 장치와 칼만 필터와 같은 고급 디지털 필터링 기술을 사용하고 있다.[22]
4. 종류
진동 구조 자이로스코프는 자동차 내비게이션 시스템과 같이 비교적 낮은 정확도를 요구하는 분야에 사용된다. 이 장치는 방향 변화를 감지하고, 추측 항법을 통해 GPS 신호가 약한 지역에서 위치 정보를 제공한다.[1]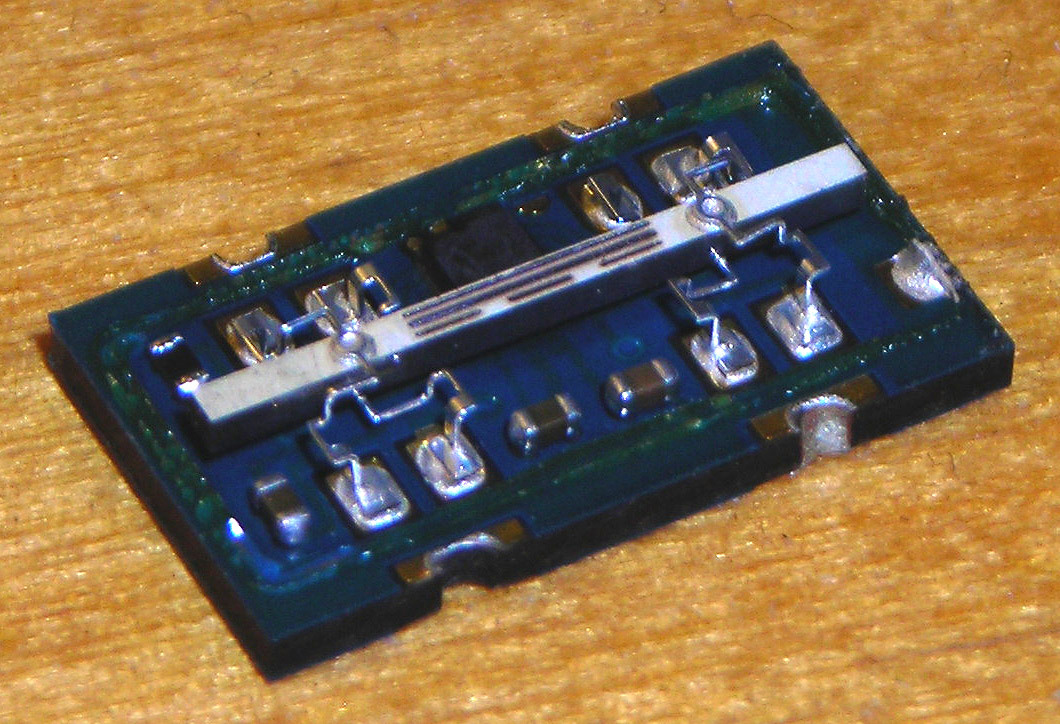
코리올리 힘을 이용하는 석영 속도 센서는 "튜닝 포크 자이로"라고도 불린다. 이 센서는 정밀한 석영 또는 실리콘 조각으로 만들어지며, 각속도를 측정한다. 미세 전자기계 시스템(MEMS) 기술을 이용하여 소형화가 가능하며, 이미지 안정화 등에 사용된다.[26]
자기유체역학적 원리를 이용한 센서(MHD 센서)도 각속도 측정에 사용될 수 있다.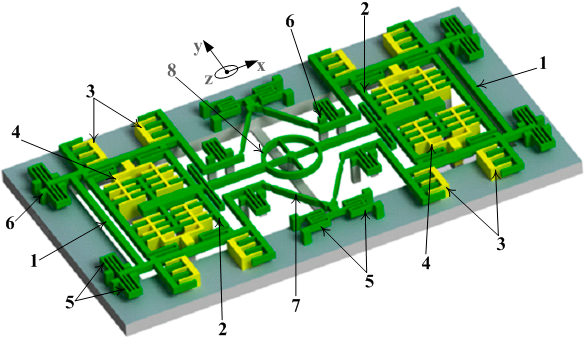
MEMS 자이로스코프는 코리올리 효과를 이용하여 각속도를 측정하는 소형 센서이다. 실리콘 칩 위에 공진 증명 질량을 장착하여 제작되며, 능동 센서로 작동한다.[27]
링 레이저 자이로(RLG)는 레이저 광선을 이용하여 회전을 측정한다. 사냐크 효과를 기반으로 하며, 낮은 회전 속도에서 ''록인''(lock-in) 현상이 발생할 수 있다. 이를 해결하기 위해 셰이커를 사용하기도 한다.
광섬유 자이로(FOG)는 외부 레이저와 광섬유를 사용하며, 사냐크 효과를 이용하여 회전을 측정한다. FOG는 RLG보다 정밀한 보정이 필요하지만, 저속에서 레이저 잠김 현상이 없고 움직이는 부품이 없어 높은 정확도와 긴 수명을 기대할 수 있다.[1]
진자 가속도계(Pendulous Accelerometer영어)는 용수철에 연결된 질량의 변위를 측정하여 가속도를 계산한다. 폐루프 가속도계는 피드백 루프를 통해 더 높은 성능을 낼 수 있다.
방위고등연구계획국(DARPA)에서는 GPS 없이 위치 추적이 가능한 TIMU(Timing & Inertial Measurement Unit) 칩 개발을 위해 마이크로-PNT 프로그램을 진행하고 있다.[28][29][30] TIMU 칩은 3축 자이로스코프, 3축 가속도계, 3축 자기력계와 고정밀 클럭을 통합하여 움직임을 측정하고 시간과 결합한다.[28][29]
4. 1. 진동 자이로
자동차에 사용하도록 설계된 저렴한 내비게이션 시스템은 진동 구조 자이로스코프를 사용하여 방향 변화를 감지하고, 주행 거리를 측정하기 위해 속도계를 사용할 수 있다. 이러한 유형의 시스템은 고급 관성 항법 장치보다 정확도가 훨씬 낮지만, GPS가 주요 내비게이션 시스템이고 건물이나 지형이 위성 신호를 차단할 때 GPS 커버리지의 격차를 메우기 위해 추측 항법이 필요한 일반적인 자동차 응용 분야에 적합하다.[1]4. 2. 반구형 공진기 자이로 (HRG)
반구형 공진 구조에 정상파를 유도한 다음, 공진 구조를 회전시키면 코리올리 힘으로 인해 구면 조화 정상파가 석영 공진기 구조와 다른 각도로 회전한다. 정상파 패턴에 대한 외부 케이스의 움직임은 총 회전 각도에 비례하며, 적절한 전자 장치로 감지할 수 있다. 이 시스템의 공진기는 우수한 기계적 특성으로 인해 융합 석영으로 가공된다. 정상파를 구동하고 감지하는 전극은 공진기를 둘러싼 별도의 석영 구조물에 직접 증착된다. 이 자이로는 전체 각도 모드(거의 무제한의 속도 성능을 제공) 또는 자이로 하우징에 대한 고정된 방향으로 정상파를 유지하는 힘 균형 모드(훨씬 더 나은 정확도를 제공)로 작동할 수 있다.이 시스템은 움직이는 부품이 거의 없고 매우 정확하다. 그러나 정밀하게 연마되고 광택 처리된 중공 석영 반구의 비용으로 인해 상대적으로 비싸다. 노스롭 그러먼은 현재 HRG를 사용하는 우주선용 IMU를 제조하고 있다. 이 IMU는 1996년 처음 사용된 이후 매우 높은 신뢰성을 입증했다.[24] 사프란은 광범위한 응용 분야에 사용되는 HRG 기반의 [https://safran-navigation-timing.com/solution/inertial-navigation-systems/ 관성 항법 시스템]을 대량으로 생산한다.[25]
4. 3. 석영 속도 센서
석영 속도 센서는 "튜닝 포크 자이로"라고도 불리며, 전자적으로 구동되는 튜닝 포크 형태로 설계된다. 주로 석영이나 실리콘 한 조각으로 제작되며, 코리올리 힘을 이용하여 각속도를 측정한다.
이 시스템은 보통 실리콘 칩에 통합된다. 칩에는 힘이 상쇄되도록 "손잡이 대 손잡이" 방식으로 배열된 두 개의 질량 균형 석영 튜닝 포크가 있다. 포크와 칩에 증착된 알루미늄 전극은 움직임을 만들고 감지한다. 석영의 치수 안정성 덕분에 시스템은 높은 정확도를 가진다.
포크가 손잡이 축을 중심으로 비틀릴 때, 톱니의 진동은 같은 평면에서 유지되려는 경향이 있다. 이 움직임은 톱니 아래 전극의 정전기적 힘으로 저항을 받는다. 시스템은 포크의 두 톱니 사이의 정전 용량 차이를 측정하여 각운동 속도를 결정한다.
현재 최첨단 비군사 기술로 인체 움직임을 측정할 수 있는 소형 고체 센서 제작이 가능하다. 이 센서는 움직이는 부품이 없고 무게는 약 50g이다.
같은 원리를 이용한 고체 장치는 소형 카메라나 캠코더의 이미지 안정화에 사용된다. 이 장치는 크기가 매우 작아 약 5mm이며, 미세 전자기계 시스템(MEMS) 기술로 제작된다.[26]
4. 4. MHD 센서
자기유체역학적 원리를 기반으로 하는 센서는 각속도를 측정하는 데 사용될 수 있다.4. 5. MEMS 자이로스코프
MEMS 자이로스코프는 일반적으로 각속도를 측정하기 위해 코리올리 효과에 의존한다. 이 장치는 실리콘에 장착된 공진 증명 질량으로 구성된다. 자이로스코프는 가속도계와 달리 능동 센서이다. 증명 질량은 구동 빗살에 의해 앞뒤로 밀려난다. 자이로스코프가 회전하면 질량에 작용하는 코리올리 힘이 발생하여 다른 방향으로 움직임이 발생한다. 이 방향으로의 움직임은 전극에 의해 측정되며, 이를 통해 회전율을 알 수 있다.[27]4. 6. 링 레이저 자이로 (RLG)
링 레이저 자이로(Ring Laser Gyro, RLG)는 레이저 광선을 온도가 안정적인 삼각 블록의 좁은 터널을 통해 반대 방향으로 분할하여 각 모서리에 반사 거울이 있는 서비트(Cervit) 유리로 구성된 닫힌 원형 광학 경로를 통과시킨다. 자이로가 어떤 각속도로 회전하면 각 빔이 이동하는 거리가 달라진다. 회전 방향과 반대 방향의 경로는 더 짧아진다. 두 빔 사이의 위상 변화는 간섭계로 측정할 수 있으며 회전 속도에 비례한다(사냐크 효과).실제로, 낮은 회전 속도에서는 후방 산란으로 인해 빔이 동기화되고 함께 잠기면서 출력 주파수가 0으로 떨어질 수 있다. 이것을 ''록인''(lock-in) 또는 ''레이저 록''(laser-lock)이라고 한다. 그 결과 간섭 패턴에 변화가 없으므로 측정값도 변화가 없다.
반대 방향으로 회전하는 광선을 잠금 해제하기 위해 레이저 자이로는 두 방향에 대해 독립적인 광학 경로를 갖거나(보통 광섬유 자이로에서) 레이저 링을 입력 축에 대해 잠금 영역을 통해 앞뒤로 빠르게 진동시키는 압전 딜더 모터에 장착하여 광파를 분리한다.
셰이커는 두 광선이 정확히 동일한 경로를 사용하기 때문에 가장 정확하다. 따라서 레이저 자이로는 움직이는 부품을 유지하지만 멀리 움직이지는 않는다.
4. 7. 광섬유 자이로스코프 (FOG)
광섬유 자이로스코프(FOG)는 광학 자이로스코프의 일종으로, 외부 레이저와 수 킬로미터 길이의 광섬유 필라멘트 스풀에서 반대 방향으로 이동하는 두 개의 빛을 사용한다. 광섬유 스풀을 통과한 후 두 빛의 위상 차이를 비교한다.[1]단색 레이저 광선이 반대 경로로 이동하는 기본 원리와 사냐크 효과는 FOG와 RLG에서 동일하지만, 세부적인 기술 방식은 FOG가 이전 레이저 자이로와 상당히 다르다.[1]
FOG는 빛이 반대 방향으로 이동하는 경로가 최대한 유사하도록 광섬유 코일을 정밀하게 감아야 한다. FOG는 RLG보다 더 복잡한 보정이 필요하여 개발 및 제조가 더 어렵다. 그러나 FOG는 저속에서 레이저 잠김 현상이 없고 움직이는 부품이 없어 RLG보다 최대 잠재 정확도와 수명이 더 길다.[1]
4. 8. 진자 가속도계
진자 가속도계(Pendulous Accelerometer영어)는 기본적으로 용수철에 연결된 질량으로 구성된다. 이 질량은 용수철과 같은 방향으로만 움직일 수 있도록 제한된다. 가속도가 발생하면 질량이 원래 위치에서 벗어나게 되고, 이 변위 거리를 측정하여 가속도를 계산한다. 가속도는 변위 거리, 질량, 그리고 용수철 상수의 값을 통해 계산된다. 또한, 진동을 막기 위해 시스템에는 감쇠 장치가 필요하다. 폐루프 가속도계는 피드백 루프를 사용하여 편향을 상쇄하고 질량을 거의 정지 상태로 유지함으로써 더 높은 성능을 낼 수 있다. 질량이 편향되면 피드백 루프가 전기 코일에 음의 힘을 가하여 움직임을 상쇄시킨다. 가속도는 가해진 음의 힘의 크기로부터 계산된다. 질량이 거의 움직이지 않으므로 용수철과 감쇠 시스템의 비선형성 효과가 크게 줄어든다. 또한, 이 가속도계는 감지 요소의 고유 주파수를 넘어서는 대역폭 증가를 제공한다.두 유형의 가속도계는 모두 실리콘 칩 위에 집적된 마이크로 기계로 제작되었다.
4. 9. TIMU 센서
방위고등연구계획국(DARPA)의 마이크로시스템 기술 사무소(MTO)는 GPS 보조 항법 없이 단일 칩에서 절대 위치 추적을 수행하는 TIMU(Timing & Inertial Measurement Unit, 시각 및 관성 측정 장치) 칩을 설계하기 위해 마이크로-PNT(위치, 항법 및 타이밍을 위한 마이크로 기술) 프로그램을 진행하고 있다.[28][29][30]마이크로-PNT는 IMU(관성 측정 장치) 칩에 매우 정확한 마스터 타이밍 클럭을 통합하여 TIMU 칩을 만든다. TIMU 칩은 3축 자이로스코프, 3축 가속도계, 3축 자기력계를 고정밀 마스터 타이밍 클럭과 통합하여 움직임을 측정하고 동기화된 클럭의 시각과 결합한다.[28][29]
5. 오차 및 보정
모든 관성항법장치는 적분 드리프트로 인해 오차가 발생한다. 가속도와 각속도 측정의 작은 오차는 속도에서 점점 더 큰 오차로 적분되고, 이는 다시 위치에서 더 큰 오차로 이어진다.[7][8] 새로운 위치는 이전에 계산된 위치와 측정된 가속도 및 각속도로부터 계산되므로, 이러한 오차는 초기 위치가 입력된 이후의 시간에 대략 비례하여 누적된다. 표준 오차가 10 마이크로 g인 최고의 가속도계조차도 17분 이내에 50미터(164피트)의 오차를 축적할 것이다.[9]
따라서 위치는 다른 유형의 항법 시스템으로부터의 입력을 통해 주기적으로 수정되어야 한다. 예를 들어, 육상 사용 시 관성적으로 추적된 속도가 정지함으로써 간헐적으로 0으로 업데이트되면 위치는 훨씬 더 오랫동안 정확하게 유지되는데, 이를 ''영속도 갱신''이라고 한다. 특히 항공 우주 분야에서는 다른 측정 시스템을 사용하여 INS의 부정확성을 결정하는데, 예를 들어 Honeywell LaseRefV 관성 항법 시스템은 GPS 및 공기 데이터 컴퓨터 출력을 사용하여 요구 항법 성능을 유지한다.
추정 이론, 특히 칼만 필터[10]는 다양한 센서의 정보를 결합하기 위한 이론적 프레임워크를 제공한다. 가장 일반적인 대체 센서 중 하나는 위성 항법 라디오, 예를 들어 GPS이며, 이는 하늘이 직접 보이는 모든 종류의 차량에 사용할 수 있다. 실내 응용 프로그램은 보행 계측기, 거리 측정 장비 또는 다른 종류의 위치 센서를 사용할 수 있다. INS와 다른 시스템 (GPS)의 정보를 적절하게 결합함으로써 위치 및 속도 오차는 수치적 안정성을 얻는다. 또한 INS는 GPS 신호를 사용할 수 없을 때, 예를 들어 차량이 터널을 통과할 때 단기적인 백업으로 사용할 수 있다.
2011년, 민간 수준에서의 GPS 재밍이 정부의 관심사가 되었다.[11] 이러한 시스템을 재밍하는 상대적인 용이성은 군이 GPS 기술에 대한 항법 의존도를 줄이도록 동기를 부여했다.[12] 관성 항법 센서는 GPS와 달리 무선 신호에 의존하지 않기 때문에 재밍될 수 없다.[13]
악천후나 전파 방해의 영향을 받지 않는다는 장점을 가지지만, 긴 거리를 이동하면 오차가 누적되어 커진다는 특징이 있으므로, 위성 항법 시스템 (GPS)이나 거리 측정 장치, 초단파 전방향 무선 표지에 의한 보정을 더하여 사용한다. 도플러 레이더 항법 장치, 무지향성 무선 표지, 천측 항법 등을 보조적으로 사용하는 경우도 있다.
6. 활용 분야
관성 항법은 항공기, 전술 및 전략 미사일, 우주선, 잠수함 및 선박의 항법을 포함한 광범위한 분야에 사용된다.[5][6] 최근에는 미세 전자기계 시스템(MEMS)의 발전으로 작고 가벼운 관성 항법 시스템 제조가 가능해져, 휴대 전화 위치 파악 및 추적, 인간 및 동물의 모션 캡처와 같은 분야에도 활용되고 있다.
관성 항법 시스템은 다양한 움직이는 물체에 사용되지만, 비용과 복잡성으로 인해 실제 사용 환경에는 제약이 있다.
1965년 독일에서 관성 센서 기술 작업 그룹이 설립되어 관성 센서 사용자, 제조업체 및 연구자를 한자리에 모았다. 이 작업 그룹은 지속적으로 발전해 왔으며 현재는 DGON ISA 관성 센서 및 응용 심포지엄으로 알려져 있다. 이 심포지엄은 매년 10월 독일에서 약 200명의 국제 참석자와 함께 개최되며, 지난 60년 이상 DGON ISA 컨퍼런스의 모든 간행물을 이용할 수 있다.
6. 1. 군사적 이용
관성항법장치(INS)는 가속도계로 가속도를 측정, 적분하여 속도와 거리를 계산하고, 자이로로 방향을 감지하여 이동 거리와 방향의 벡터를 합성, 기점으로부터의 이동 거리를 산출한다. 기점 위치를 입력하면 이동 후에도 자체 기기의 위치와 속도를 계산하여 파악할 수 있다.[1]INS는 악천후나 전파 방해에 영향을 받지 않지만, 장거리 이동 시 오차가 누적되는 단점이 있어 위성 항법 시스템(GPS), 거리 측정 장치, 초단파 전방향 무선 표지 등으로 보정한다. 도플러 레이더 항법 장치, 무지향성 무선 표지, 천측 항법 등을 보조적으로 사용하기도 한다.[1]
INS는 기계식 자이로를 사용한 안정대(플랫폼) 위에 가속도계를 설치하여 방향과 가속도를 감지하고, 내장 컴퓨터가 자동, 연속적으로 계산하여 항법 정보를 출력한다. 레이저 자이로를 사용하고 기계적 회전 부분과 안정대를 제거한 스트랩다운 방식 관성 기준 장치(IRS)도 개발되고 있다. 스트랩다운 방식은 짐벌에 의한 가속도 영향을 받지 않고 무게, 부피, 전력 소비를 줄인다.[1]
INS와 IRS의 주요 차이점은 자이로 구조가 아닌 항법 능력 유무이며, 항법 능력이 없는 IRS는 비행 관리 장치(FMS)와 조합하여 사용하고, 항법은 FMS가 담당한다.[1] 레이저 자이로 실용화 전에는 기계식 자이로 IRS가 사용되었을 가능성도 있다.[1]
도플러 레이더 항법 장치는 단독 항법이 가능하나, 지면 레이더 감지가 전제되어야 하고 전자기파 산란 및 클러터에 의한 오차(특히 해상) 때문에 여객기 등에서는 보조적으로만 사용되고, INS가 주요 장치가 된다.[1]
INS, 도플러 레이더 항법 장치 등 외부 시설에 의존하지 않고 단독 항법을 수행하는 장치를 '''자장 항법 장치''', '''자립(자율) 항법 장치'''라 부른다.[1]
6. 2. 민간 이용
관성 항법은 상업용 항공기, 선박 등에서 널리 사용된다.[5][6] 미세 전자기계 시스템(MEMS) 기술의 발전으로 작고 가벼운 관성 항법 시스템 제조가 가능해지면서, 모션 캡처 분야 등 적용 범위가 넓어졌다. 최근 자율주행차, 드론, 로봇 등의 발전으로 민간 분야에서의 활용이 더욱 확대될 것으로 예상된다.7. 역사
관성 항법 장치는 원래 로켓을 위해 개발되었다. 미국의 로켓 공학 선구자 로버트 고다드는 초보적인 자이로스코프 시스템을 실험했고, 이는 베르너 폰 브라운을 포함한 동시대 독일 과학자들에게 큰 영향을 주었다.
제2차 세계 대전 당시 독일의 V-2 로켓 유도 시스템은 두 개의 자이로스코프와 측면 가속도계를 간단한 아날로그 컴퓨터와 결합하여 로켓의 방위각을 조정했다. V-2 로켓의 GN&C(유도, 항법 및 제어) 시스템은 폐쇄 루프 유도를 갖춘 통합 플랫폼을 제공하여 많은 혁신을 이루었다.[15] 전쟁이 끝날 무렵, 폰 브라운은 500명의 최고 로켓 과학자들과 함께 Operation Paperclip에 따라 미국에 항복, 1945년 텍사스주 포트 블리스를 거쳐 1950년 앨라배마주 헌츠빌에서 미 육군 로켓 연구 프로그램에 참여했다.
1950년대 초, 미국 정부는 독일 팀에 대한 군사적 의존성을 줄이고자 자체적인 미사일 유도 프로그램 개발을 시작했다. MIT 계측 연구소(이후 찰스 스타크 드레이퍼 연구소로 변경)는 공군 서부 개발 부서의 요청으로 샌디에이고 컨베어 사의 새로운 아틀라스 대륙간 탄도 미사일의 자체 유도 시스템 백업을 제공하게 되었다.[16][17][18][19] 이 과제의 기술 감시원은 후에 NASA 행정관이 된 짐 플레처였다. 아틀라스 유도 시스템은 초기에는 탑재 자율 시스템과 지상 기반 추적 및 명령 시스템을 결합한 형태였으나, 탄도 미사일에는 자체 시스템이, 우주 탐사에는 두 시스템의 혼합이 유지되었다.
1952년 여름, 리처드 배틴 박사와 J. 할콤 "할" 래닝 주니어 박사는 유도에 대한 계산 기반 솔루션을 연구하여 1954년에 아틀라스 관성 유도에 대한 초기 분석 작업을 수행했다. 컨베어의 찰리 보사트 수석 엔지니어와 유도 그룹 책임자 발터 슈바이데츠키(제2차 세계 대전 중 페네뮌데에서 폰 브라운과 함께 일함)도 이 연구에 주요한 역할을 했다.
초기 델타 유도 시스템은 참조 궤적과의 위치 차이를 평가하는 방식이었으나, 정확한 관성 유도 및 아날로그 컴퓨팅 능력의 한계로 어려움을 겪었다. 이러한 문제는 Q 시스템(Q-유도)을 통해 극복되었는데, Q 시스템은 미사일 유도(및 관련 운동 방정식)의 문제를 Q 행렬에 묶는 혁신적인 방식이었다. Q 행렬은 위치 벡터에 대한 속도의 편미분을 나타냈으며, 벡터 외적(v, xdv, /dt)의 구성 요소를 기본 자동 조종 장치 속도 신호로 사용하는 ''교차 생성물 조향'' 기술을 가능하게 했다. Q 시스템은 1956년 6월 로스앤젤레스에서 열린 제1회 탄도 미사일 기술 심포지엄에서 발표되었으며, 1960년대까지 기밀로 유지되었다. 이 유도 방식은 현재 미사일에도 사용되고 있다.
참조
[1]
웹사이트
Basic Principles of Inertial Navigation Seminar on inertial navigation systems.
http://www.aerostude[...]
Tampere University of Technology, page 5
2018-04-17
[2]
서적
Springer Handbook of Robotics
https://books.google[...]
Springer Science & Business Media
2008-05-20
[3]
서적
Mobile Robots: Navigation, Control and Remote Sensing
https://books.google[...]
John Wiley & Sons
2011-10-14
[4]
웹사이트
NASA.gov
https://www.hq.nasa.[...]
2021-01-26
[5]
간행물
Robust Special Strategies Resampling for Mobile Inertial Navigation Systems
https://www.ijitee.o[...]
[6]
간행물
An Improved Resampling Scheme for Particle Filtering in Inertial Navigation System
https://link.springe[...]
[7]
서적
Synthesis of Embedded Software: Frameworks and Methodologies for Correctness by Construction
https://books.google[...]
Springer Science & Business Media
2010-08-05
[8]
서적
Inertial navigation systems analysis
Wiley-Interscience
[9]
문서
Calculated from reversing S=1/2.a.t^2 into t=√(2s/a), where s=distance in meters, a is acceleration (here 9.8 times g), and t is time in seconds.
[10]
서적
Applied Optimal Estimation
M.I.T. Press
[11]
웹사이트
GPS.gov: Information About GPS Jamming
https://www.gps.gov/[...]
2018-07-30
[12]
웹사이트
Position Estimation for Projectiles Using Low-cost Sensors and Flight Dynamics
http://apps.dtic.mil[...]
2012-04
[13]
웹사이트
Securing military GPS from spoofing and jamming vulnerabilities
http://mil-embedded.[...]
2018-07-30
[14]
뉴스
New guided munition sensors are greater than sum of their parts
https://www.army.mil[...]
2018-07-30
[15]
웹사이트
Sputnik Biographies—Wernher von Braun (1912–1977)
https://history.nasa[...]
[16]
웹사이트
Engineering360
http://www.globalspe[...]
[17]
간행물
Space guidance evolution – A personal narrative
[18]
웹사이트
Technology Push
http://www.history.n[...]
2017-07-09
[19]
서적
Inventing Accuracy: A Historical Sociology of Nuclear Missile Guidance
https://archive.org/[...]
MIT Press
1993
[20]
문서
Apollo on-board guidance, navigation and control system
International Space Hall of Fame Dedication Conference in Alamogordo, N.M.
[21]
웹사이트
Apollo Guidance and Navigation
http://web.mit.edu/d[...]
2017-07-09
[22]
서적
Eshbach's Handbook of Engineering Fundamentals
[23]
간행물
PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No.04CH37556)
2004
[24]
웹사이트
The Hemispherical Resonator Gyro: From Wineglass to the Planets, David M. Rozelle
http://www.northropg[...]
Northropgrumman.com
[25]
웹사이트
Safran Logs 3,000 Orders for HRG-Based Navigation Systems
http://www.defaiya.c[...]
2017-05-04
[26]
웹사이트
Epson Toyocom Quartz Gyro sensors – How they work and what's ahead
http://www.findmems.[...]
[27]
웹사이트
Gyroscopes
https://www.xsens.co[...]
2019-01-22
[28]
웹사이트
Micro-Technology for Positioning, Navigation and Timing (Micro-PNT)
http://www.darpa.mil[...]
2017-07-09
[29]
웹사이트
Extreme Miniaturization: Seven Devices, One Chip to Navigate without GPS
http://www.darpa.mil[...]
[30]
웹사이트
Microfabrication methods to help navigate a day without GPS
http://www.darpa.mil[...]
2017-07-09
[31]
웹사이트
Clocks
http://www.darpa.mil[...]
2017-07-09
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com