루노호트 계획
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
루노호트 계획은 소련의 무인 달 탐사 로버 개발 계획으로, 유인 달 탐사 및 달 기지 건설 지원을 목표로 했다. 이 계획을 통해 루노호트 1호와 2호가 달 표면에 성공적으로 착륙했으며, 3호는 제작되었지만 발사되지 못했다. 루노호트 로버는 8개의 바퀴, 카메라, 과학 장비를 갖추고 원격 제어 방식으로 운영되었으며, 달 표면의 지형 탐사, 사진 촬영, 토양 분석 등의 임무를 수행했다. 루노호트 2호는 42km를 탐사하여 외계 행성 표면 이동 거리 최장 기록을 세우기도 했다. 루노호트 기술은 체르노빌 사고 복구에도 활용되었으며, 루노호트 2호는 현재 개인 소유이다.
더 읽어볼만한 페이지
- 루노호트 계획 - 루노호트 2호
루노호트 2호는 1973년 루나 21호에 의해 달에 보내진 소비에트 연방의 두 번째 무인 달 탐사 로버로, 르 모니에 분화구에서 약 4개월간 활동하며 37km(후에 42km로 수정됨)를 이동하고 다양한 과학적 데이터를 지구로 전송했으며, 현재도 월면 레이저 거리 측정 실험을 통해 탐지되고 있다. - 루노호트 계획 - 루노호트 1호
루노호트 1호는 1970년 소련이 발사한 달 탐사차로, 322일 동안 10,540미터를 이동하며 2만 장 이상의 사진과 과학 데이터를 전송했으며 1971년 임무가 종료되었다. - 라보츠킨 - S-75 드비나
S-75 드비나는 소련에서 개발되어 여러 국가에서 운용된 지대공 미사일 시스템으로, 고고도 폭격기 요격을 목표로 개발되었으며, 다양한 전투에서 사용되었고 여러 개량형을 거쳐 현재도 일부 국가에서 운용되거나 지대지 미사일로 개조되어 사용된다. - 라보츠킨 - 엑소마스
엑소마스는 유럽 우주국과 러시아 연방 우주국이 공동으로 추진하는 화성 탐사 계획으로, 궤도선과 로버를 통해 화성의 생명체 흔적을 탐사하는 것을 목표로 하며, 2016년 1차 발사에서 궤도선은 성공했지만 착륙선은 실패했고, 2022년 2차 발사는 연기되어 2028년 이후 발사를 목표로 재조정되었다. - 달 탐사차 - 아폴로 15호
아폴로 15호는 1971년 발사된 미국의 아폴로 계획 중 9번째 유인 미션으로, 달 탐사차를 처음 사용하여 해들리 계곡과 아펜니노 산맥 일대를 탐사하고 월석을 채취하는 등 과학적 탐사에 중점을 둔 J-미션이었으나, 승무원들의 우표 소지 논란이 있었다. - 달 탐사차 - 아폴로 16호
아폴로 16호는 1972년 4월 16일에 발사되어 데카르트 고원에 착륙, 3일간 달 표면을 탐사하고 다량의 표본을 채취했으며, 월면차 최고 속도 기록을 세우고 달 궤도에 위성을 배치하는 등 다양한 과학 관측을 수행한 아폴로 계획의 다섯 번째 유인 달 착륙 임무이다.
2. 개발

루노호트의 초기 개발 목적은 L3 유인 달 탐사와 이후 계획된 즈베즈다 달 기지 건설을 지원하는 것이었다.[1] 초기 계획에 따르면, 우주비행사가 탑승한 LK 착륙선보다 먼저 무인 착륙선과 2대의 루노호트 로버를 보내 착륙 예정지 주변을 조사하고, 정밀 착륙을 위한 무선 비콘 역할을 수행하며 현장 상태를 평가할 예정이었다.[1] 또한 로버에 문제가 생겼을 경우를 대비해 우주비행사를 백업 착륙선으로 이동시키는 기능도 고려되었다. 그러나 미국의 아폴로 계획 성공 이후, 루노호트의 주 임무는 달 표면 원격 탐사로 변경되었다.
로버의 성능 테스트와 원격 조종 기술 개발을 위해 1968년 중반, 크림반도 심페로폴 근처의 폐쇄 도시 시콜노예( Школьное|시콜노예ru )에 위치한 KIP-10 또는 NIP-10 시설[2] 내에 '루노드롬'(лунодром|루노드롬ru)이라는 실제 달 표면을 모방한 대규모 실험 시설이 건설되었다.[3] 이 시설은 로버의 섀시(차대) 문제점을 분석하고, 지상 관제팀의 원격 제어 기술을 시험하고 훈련하는 데 사용되었다.[4][5][37] 루노드롬이 위치한 시콜노예는 소련의 핵심 우주 추적 시설 중 하나로, 소련의 달 탐사 계획 전반을 지원하는 중요한 역할을 담당했으며, 예브파토리아 심우주 추적 시설과 연계하여 운영되었다.[6][7]
루노호트 계획을 위해 최소 4대의 완성된 로버 차량이 제작되었으며, 각각 201, 203, 204, 205의 일련 번호가 부여되었다.
2. 1. 개발 배경 및 초기 계획
루노호트의 원래 주 임무는 L3 유인 달 탐사 및 이후 즈베즈다 달 기지 건설을 지원하는 것이었다. 임무의 안전을 위해, 우주비행사가 LK 착륙선에 탑승하기 몇 주 전에 L3 달 탐사 복합체의 무인 LK-R 착륙선과 2대의 루노호트 자동 로버가 먼저 달로 보내질 예정이었다.[1] 이들의 임무는 LK-R과 LK 착륙 지점 부근 표면을 예비 조사하고, LK-R과 LK의 정밀 착륙을 위한 무선 비콘 역할을 하며, 현장 상태를 시각적으로 평가하는 것이었다.[1] 또한 탐사차에 문제가 발생할 경우, 우주비행사 1명을 백업용 LK 착륙선으로 이동시키기 위한 설계도 포함되어 있었다. 그러나 아폴로 계획의 성공 이후에는 달 표면 원격 탐사에 활용되는 것으로 계획이 변경되었다.
탐사차의 지상 테스트와 운용 기술 개발을 위해 1968년 중반, 크림반도 심페로폴 근처의 폐쇄 도시 시콜노예(Школьное|시콜노예ru)에 위치한 КИП-10 or НИП-10|KIP-10 또는 NIP-10ru 시설[2] 내에 '루노드롬'(лунодром|루노드롬ru)이라는 실험 시설이 건설되었다. 이 시설은 달 표면의 일부를 모방한 것으로, 면적은 약 1ha(120m × 70m)에 달했다. 건설에는 3000m3 이상의 흙이 사용되었으며, 직경 최대 16m의 크레이터를 포함한 54개의 크레이터와 다양한 크기의 약 160개의 암석이 배치되었다.[3] 전체 지역은 회색과 검은색으로 칠해진 벽돌로 둘러싸여 있었다. 이곳에서 루노호트 섀시의 문제점 분석과 우주비행사의 원격 제어 기술 훈련 등이 이루어졌다.[4][5][37]
루노드롬이 위치한 폐쇄 도시 심페로폴-28은 소련에서 가장 중요한 우주 추적 시설 중 하나였다. 소련의 추적 시설 중 가장 많은 수의 안테나, 가장 넓은 면적, 가장 많은 인력을 보유하고 있었으며, 지구 위성 추적 장비를 갖추고 소련의 근지구 민간 및 군사 활동을 지휘·통제하는 10개 시설 네트워크의 일부였다. 또한 이 시설은 예브파토리아 심우주 추적 시설과 연계하여 소련의 모든 달 계획을 지원했다.[6][7]
최소 4대의 완성된 루노호트 차량이 제작되었으며, 일련 번호는 201, 203, 204, 205였다.
2. 2. 루노드롬 건설
루노호트의 원래 주 임무는 L3 유인 달 탐사 및 이후 즈베즈다 달 기지 건설 계획의 백업 역할을 수행하는 것이었다. 임무의 안전성을 높이기 위해, 우주비행사가 LK 착륙선에 탑승하기 몇 주 전에 무인 LK-R 착륙선과 2대의 루노호트 로버를 먼저 달에 보낼 계획이었다. 이 로버들은 LK-R과 LK 착륙 예정지 부근 표면을 예비 조사하고, 착륙선들의 정밀 착륙을 위한 무선 비콘 역할을 하며, 현장 상태를 시각적으로 평가하는 임무를 맡았다.[1]
이러한 계획의 일환으로 1968년 중반, 크림반도 심페로폴 근처의 폐쇄 도시인 시콜노예(심페로폴-28)(Школьное (Крым)|시콜노예ru)에 위치한 KIP-10 또는 NIP-10(КИП-10 or НИП-10, 북위 45.052703°, 동경 33.890256°) 시설 내에[2] 실제 달 표면과 유사한 환경을 모방한 '루노드롬'(лунодром, 달 기지, 북위 45.054212°, 동경 33.893627°)이라는 대규모 실험 시설이 건설되었다.
루노드롬은 약 1ha(120m x 70m) 면적에 달했으며, 달 표면의 일부를 재현하기 위해 3000m3 이상의 흙이 사용되었다. 이곳에는 직경 최대 16m에 달하는 54개의 크레이터와 다양한 크기의 암석 약 160개가 배치되었다.[3] 전체 시설은 회색과 검은색으로 칠해진 벽돌로 둘러싸여 있었다. 이 루노드롬은 루노호트 로버의 섀시(차대) 문제를 분석하고, 우주비행사의 원격 제어 기술을 시험하고 개선하는 데 활용되었다.[4][5][37]
루노드롬이 위치한 폐쇄 도시 시콜노예(심페로폴-28)는 소련에서 가장 중요한 우주 추적 시설 중 하나였다. 이곳은 소련의 추적 시설 중 가장 많은 수의 안테나, 가장 넓은 면적, 가장 많은 인력을 보유하고 있었다. 지구 인공위성 추적 장비를 갖추고 소련의 근지구 민간 및 군사 우주 활동을 지휘하고 통제하는 10개 시설 네트워크의 일부였으며, 소련의 모든 달 탐사 계획을 예브파토리아 심우주 추적 시설과 연계하여 지원하는 핵심적인 역할을 수행했다.[6][7]
루노호트 계획을 위해 최소 4대의 완성된 로버 차량이 제작되었으며, 각각 201, 203, 204, 205번의 일련번호가 부여되었다.
2. 3. 추적 시설
루노호트 임무를 지원하기 위해 크림반도 심페로폴 근처의 폐쇄 도시인 시콜노예(Школьное (Крым)|시콜노예(크림)ru)에는 KIP-10 또는 NIP-10 (КИП-10 or НИП-10)으로 불리는 핵심 추적 시설이 위치했다.[2] 이 시설은 소련에서 가장 중요한 추적 시설 중 하나로, 가장 많은 수의 안테나와 가장 넓은 면적, 가장 많은 인력을 보유하고 있었다. 지구 위성 차량 추적 장비를 갖추고 소련의 근지구 민간 및 군사 활동을 지휘·통제하는 10개 시설 네트워크의 일부였으며, 소련의 모든 달 탐사 계획을 예브파토리아 심우주 추적 시설과 연계하여 지원하는 중요한 역할을 담당했다.[6][7]
특히 1968년 중반에는 이 시설 내에 루노호트 로버의 원격 조종 훈련과 기술 검증을 위한 '루노드롬'(Lunodrom, 달 기지)이라는 모의 달 표면 훈련장이 건설되었다. 이 훈련장은 약 1ha ( 120m x 70m ) 면적에 달했으며, 실제 달 표면과 유사하게 조성되었다. 건설에는 3000m3 이상의 흙이 사용되었고, 직경 최대 16m에 이르는 54개의 크레이터와 다양한 크기의 암석 약 160개가 배치되었다.[3] 전체 지역은 회색과 검은색으로 칠해진 벽돌로 둘러싸여 있었으며, 이곳에서 루노호트 섀시의 문제점을 분석하고 우주비행사들의 원격 제어 기술을 시험했다.[4][5]
2. 4. 차량 제작
루노호트의 원래 주 임무는 L3 유인 달 탐사 및 이후 즈베즈다 달 기지 건설 계획을 지원하는 것이었다. LK 착륙선에 우주비행사가 탑승하기 몇 주 전, L3 달 탐사 복합체의 무인 LK-R 착륙선과 2대의 루노호트 자동 로버를 먼저 달에 보낼 계획이었다. 이들의 임무는 LK-R과 LK 착륙 예정지 부근 표면을 예비 연구하고, LK-R과 LK의 정밀 착륙을 위한 무선 비콘 역할을 하며, 현장 상태를 시각적으로 평가하는 것이었다.[1] 또한 탐사차에 문제가 발생할 경우, 우주비행사 1명을 백업용 LK 착륙선으로 이동시키기 위한 설계도 포함되어 있었다. 하지만 아폴로 계획의 성공 이후에는 달 표면 원격 탐사에 활용되었다.
차량 테스트 및 운용 훈련을 위해 1968년 중반, 크림반도 심페로폴 근처의 폐쇄 도시 시콜노예(심페로폴-28)(Школьное (Крым)|시콜노예(크림)ru)에 위치한 KIP-10 또는 NIP-10(КИП-10 or НИП-10) 시설[2] 내에 '루노드롬'(лунодром|루노드롬ru, 달 훈련장)이 건설되었다. 이 시설은 달 표면의 일부를 모방하여 만든 실험장으로, 면적은 약 1ha(120m × 70m)에 달했다. 건설에는 3000m3 이상의 흙이 사용되었으며, 직경 최대 16m 크기의 분화구를 포함한 54개의 크레이터와 다양한 크기의 암석 약 160개가 배치되었다.[3][37] 전체 지역은 회색과 검은색으로 칠해진 벽돌로 둘러싸여 있었다. 루노드롬은 루노호트 섀시의 문제점을 분석하고 우주비행사의 원격 제어 기술을 훈련하는 데 사용되었다.[4][5]
루노드롬이 위치한 폐쇄 도시 시콜노예(심페로폴-28)는 소련에서 가장 중요한 우주 추적 시설 중 하나였다. 이곳은 소련 추적 시설 중 가장 많은 수의 안테나, 가장 넓은 면적, 가장 많은 인력을 보유하고 있었으며, 지구 위성 및 우주선 추적 장비를 갖추고 소련의 민간 및 군사 우주 활동을 지휘·통제하는 10개 시설 네트워크의 일부였다. 또한 소련의 모든 달 탐사 계획을 예브파토리아 심우주 추적 시설과 연계하여 지원하는 핵심적인 역할을 수행했다.[6][7]
최소 4대의 완성된 루노호트 차량이 제작되었으며, 각각 201, 203, 204, 205의 일련 번호가 부여되었다.
3. 로버 설계
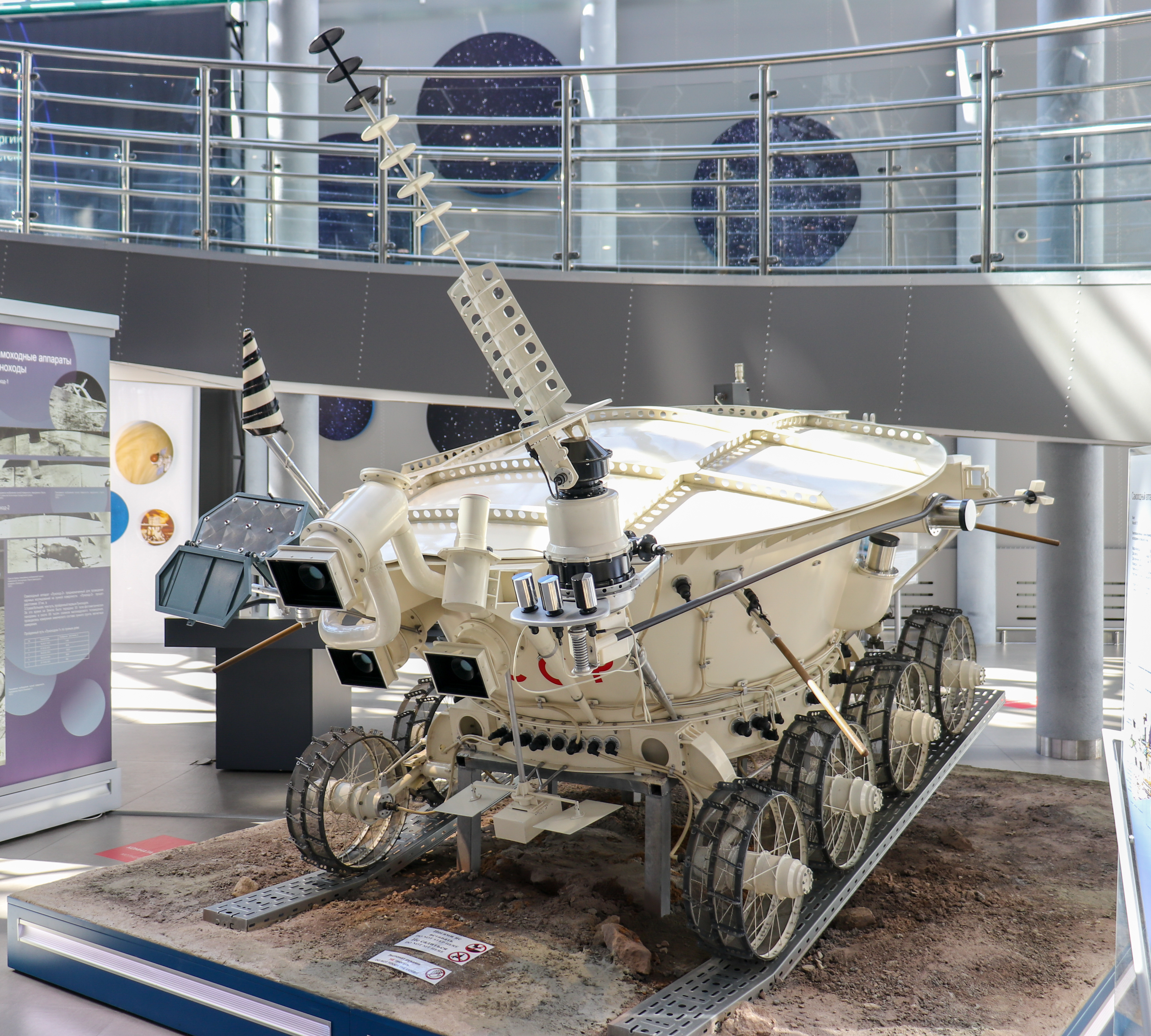
루노호트 로버는 달 표면 탐사를 위해 설계된 달 탐사차였다. 게오르기 바바킨[8]의 지휘 아래 라보킨 설계국에서 개발되었으며, 금속 섀시는 알렉산드르 케무르지안이 설계했다. 로버는 8개의 독립 구동 바퀴 위에 통 모양의 본체와 둥근 뚜껑을 가진 독특한 구조를 특징으로 했다. 내부에는 통신 장비, 카메라, 과학 장비 등이 탑재되었으며, 달의 극한 환경에서도 작동할 수 있도록 특수한 설계가 적용되었다.[9][10][11] 전력 공급 방식, 구체적인 제원 및 운송 과정 등 세부 사항은 하위 문단에서 설명한다.
3. 1. 기본 구조 및 기능
루노호트 로버는 달 표면 탐사를 위해 설계된 차량으로, 8개의 독립적으로 구동되는 바퀴 위에 둥근 뚜껑이 달린 통 모양의 구획으로 이루어져 있다. 주요 장비로는 원뿔형 안테나, 매우 지향성이 높은 나선형 안테나, 텔레비전 카메라 등이 있었으며, 달 토양의 밀도를 측정하고 기계적 특성을 시험하기 위한 특수 확장 장치와 임무에 따라 달라지는 다양한 과학 장비들을 탑재했다.
이 탐사차는 게오르기 바바킨[8]의 지휘 아래 라보킨 설계국에서 설계되었고, 금속 섀시는 알렉산드르 케무르지안이 설계했다.
루노호트는 배터리를 동력원으로 사용했다. 주로 달의 낮 시간 동안 활동했으며, 때때로 태양 전지판을 이용해 배터리를 충전하기 위해 멈추기도 했다. 전력은 계측기 베이를 덮는 둥근 경첩식 뚜껑 안쪽에 부착된 GaAs 태양 전지판을 통해 낮 동안 공급되었고, 뚜껑을 열면 배터리가 충전되는 방식이었다. 달의 밤 동안에는 뚜껑을 닫고, 폴로늄-210 방사성 동위원소 히터 장치를 사용하여 내부 부품들이 작동 온도를 유지하도록 했다.[9]
진공 상태인 달 환경에서 작동하기 위해, 로버의 기계 부품에는 특수한 불화물 기반의 윤활제가 사용되었다. 또한 각 바퀴 허브에 있는 전기 모터는 외부 환경으로부터 보호하기 위해 가압된 용기 안에 넣었다.[10][11]
루노호트의 주요 제원은 다음과 같다.
루노호트는 루나 우주선에 실려 달 표면으로 수송되었으며, 이 우주선은 프로톤-K 로켓을 이용해 발사되었다. 루노호트를 탑재한 루나 우주선의 달 착륙선 부분은 샘플 반환 임무에 사용된 착륙선과 유사한 구조를 가졌다.
3. 2. 전력 시스템
루노호트 로버는 기본적으로 배터리를 통해 전력을 공급받았다. 달의 낮 동안에는 작동하면서 때때로 태양 전지판을 이용해 배터리를 충전하기 위해 멈추기도 했다. 전력은 기기 수납부를 덮는 둥근 경첩식 뚜껑 안쪽에 설치된 GaAs 태양 전지판 배열에서 생산되었다. 이 뚜껑을 열면 태양광을 받아 배터리를 충전할 수 있었다. 달의 밤에는 뚜껑을 닫고, 폴로늄-210을 이용한 방사성 동위원소 히터 장치를 가동하여 내부 부품들이 작동 온도를 유지하도록 했다.[9]3. 3. 특수 설계
루노호트 로버는 8개의 독립 구동 바퀴 위에 둥근 뚜껑이 달린 통 모양의 구획으로 구성된 달 탐사차였다. 원뿔형 안테나, 매우 지향성 있는 나선형 안테나, 텔레비전 카메라, 달 토양의 밀도 측정 및 기계적 특성 시험을 위한 특수 확장 장치와 임무에 따라 달라지는 과학적 탑재체를 갖추고 있었다.
루노호트는 게오르기 바바킨[8]의 지휘 아래 라보킨 설계국에서 설계되었으며, 금속 섀시는 알렉산드르 케무르지안이 설계했다.
이 차량은 배터리로 전원을 공급받았다. 로버는 달의 낮 시간 동안 작동하며, 때때로 태양 전지판을 사용하여 배터리를 충전하기 위해 멈췄다. 전력은 계측기 베이를 덮는 둥근 경첩식 뚜껑 안쪽에 부착된 GaAs 태양 전지 어레이를 통해 달의 낮 동안 공급되었으며, 뚜껑을 열면 배터리가 충전되었다. 달의 밤 동안에는 뚜껑을 닫고 폴로늄-210 방사성 동위원소 히터 장치를 사용하여 내부 부품을 작동 온도로 유지했다.[9]
진공 상태에서 작동하기 위해 특수한 불화물 기반 윤활제가 로버의 기계 부품에 사용되었고, 각 바퀴 허브에 하나씩 있는 전기 모터는 가압된 용기 안에 넣었다.[10][11]
로버의 높이는 135cm였고 질량은 840kg이었다. 길이는 약 170cm, 너비는 160cm였으며, 각각 독립적인 서스펜션, 모터 및 브레이크가 있는 8개의 바퀴를 가지고 있었다. 로버는 약 1km/h와 2km/h의 두 가지 속도로 움직일 수 있었다.
루노호트는 루나 우주선을 통해 달 표면으로 수송되었으며, 이는 프로톤-K 로켓에 의해 발사되었다. 루노호트를 탑재한 루나 우주선의 달 착륙선 부분은 샘플 반환 임무에 사용된 것과 유사한 형태였다.
3. 4. 제원
루노호트 로버는 8개의 독립 구동 바퀴 위에 둥근 뚜껑이 달린 통 모양의 구획으로 구성된 달 탐사차였다. 원뿔형 안테나, 매우 지향성 있는 나선형 안테나, 텔레비전 카메라, 달 토양의 밀도 측정 및 기계적 특성 시험을 위한 특수 확장 장치와 임무에 따라 달라지는 과학 장비를 갖추고 있었다.
루노호트는 게오르기 바바킨[8]의 지휘 아래 라보킨 설계국에서 설계되었으며, 금속 섀시는 알렉산드르 케무르지안이 설계했다.
차량은 배터리로 전원을 공급받았다. 로버는 달의 낮 동안 작동하며, 때때로 태양 전지판으로 배터리를 충전하기 위해 멈췄다. 낮 동안에는 계측기 부분을 덮는 둥근 경첩식 뚜껑 안쪽의 GaAs 태양 전지판으로 전력을 얻었으며, 뚜껑을 열면 배터리가 충전되었다. 달의 밤에는 뚜껑을 닫고 폴로늄-210 방사성 동위원소 히터 장치를 이용해 내부 부품을 작동 온도로 유지했다.[9]
진공 상태에서 작동하기 위해 특수한 불화물 기반 윤활제가 기계 부품에 사용되었고, 각 바퀴 허브에 있는 전기 모터는 가압된 용기 안에 넣었다.[10][11]
로버의 높이는 135cm이고 질량은 840kg이었다. 길이는 약 170cm, 너비는 약 160cm였다. 각기 독립적인 서스펜션, 모터, 브레이크가 장착된 8개의 바퀴가 있었다. 로버는 두 가지 속도(약 1km/h와 2km/h)로 움직일 수 있었다.
루노호트는 루나 우주선을 통해 달 표면으로 운송되었으며, 이 우주선은 프로톤-K 로켓으로 발사되었다. 루노호트를 탑재한 루나 착륙선 부분은 샘플 반환 임무에 사용된 것과 유사한 구조였다.
3. 5. 운송
루노호트는 루나 우주선을 통해 달 표면으로 수송되었다. 이 루나 우주선은 프로톤-K 로켓을 사용하여 발사되었다. 루노호트를 달 표면에 착륙시키는 데 사용된 루나 우주선의 착륙선 부분은 샘플 반환 임무에 사용된 착륙선과 유사한 구조를 가졌다.4. 루노호트 로버
루노호트 로버는 소련이 루노호트 계획의 일환으로 개발한 달 탐사 로봇 시리즈이다. NPO 라보시킨에서 설계 및 제작되었으며, 냉전 시대 미국과의 우주 경쟁 속에서 개발되었다. 총 4대의 로버가 제작되었으며, 이 중 2대가 성공적으로 달 표면에 착륙하여 임무를 수행했다.
최초의 로버인 루노호트 201은 1969년 발사되었으나 실패로 소실되었다.[12][38] 이후 루노호트 1호는 1970년 루나 17호에 실려 달에 착륙하여, 지구 외 천체에 착륙한 최초의 원격 조종 로봇이라는 기록을 세웠다. 1973년에는 더욱 발전된 루노호트 2호가 루나 21호를 통해 달에 착륙하여 다양한 과학 탐사 임무를 성공적으로 수행했다. 마지막 모델인 루노호트 3호는 1977년 발사를 목표로 제작되었으나, 예산 및 발사체 문제로 실제 발사되지는 못했다.[17][41]
루노호트 로버들은 8개의 독립 구동 바퀴를 가졌으며, 상단에는 여닫이식 덮개 안쪽에 태양광 패널을 장착하여 낮 동안 동력을 얻었다. 밤에는 활동을 멈추고 방사성 동위원소 히터를 이용해 내부 온도를 유지했다.[39][40] 지구의 통제 센터에서 원격으로 조종되었으며,[15] 다양한 카메라와 과학 장비를 탑재하여 달 표면 환경을 조사하고 지구-달 거리 측정 실험 등을 수행했다.[14][16]
4. 1. 루노호트 201
수년간의 비밀 개발과 훈련을 거쳐, 첫 번째 루노호트인 차량 8ЕЛ№201이 1969년 2월 19일에 발사되었다.[12][38] 하지만 발사 몇 초 만에 로켓이 공중에서 폭발하면서 루노호트 201은 그대로 손실되었다.[12][38] 이 사고로 인해 탐사차의 동력원으로 탑재되었던 방사성 동위원소 폴로늄 210이 러시아의 넓은 지역에 퍼지게 되었다.[13] 소련은 이 발사 자체와 실패 사실을 극비에 부쳤으며, 소련이 붕괴되기 전까지 다른 나라들은 로켓에 루노호트가 실려 있었다는 사실조차 알지 못했다.[12][38] 실패 이후, 소련 기술자들은 즉시 다음 탐사차 개발에 착수했다.[38]4. 2. 루노호트 1호

루노호트 1(차량 8Ел№203)은 소련이 루노호트 계획의 일환으로 달에 성공적으로 착륙시킨 두 대의 무인 달 탐사 로버 중 첫 번째이다. 초기 루노호트가 발사 실패로 파괴된 후, 소련 엔지니어들은 즉시 다음 탐사 차량 개발에 착수했다. 루노호트 1호를 탑재한 우주선은 루나 17호로 명명되었으며, 루노호트 1호는 다른 천체에 착륙한 최초의 원격 조종 로봇이 되었다.
루나 17호는 1970년 11월 10일 14시 44분 01초(UTC)에 발사되었다. 지구 주차 궤도에 도달한 후, 루나 17호의 마지막 단계 로켓이 14시 54분(UTC)에 점화되어 달 전이 궤도로 진입했다. 11월 12일과 14일 두 차례의 궤도 수정을 거쳐, 1970년 11월 15일 22시 00분(UTC)에 달 궤도에 진입했다.
우주선은 1970년 11월 17일 03시 47분(UTC)에 비의 바다(Mare Imbrium)에 연착륙했다. 착륙선에는 루노호트 1호가 달 표면으로 내려갈 수 있도록 이중 경사로가 설치되어 있었다. 같은 날 06시 28분(UTC)에 로버는 이 경사로를 통해 달 표면에 성공적으로 전개되었다.
로버에는 다양한 과학 장비가 탑재되었다. 여기에는 카메라(텔레비전 카메라 2대, 파노라마 텔레포토미터 4대), RIFMA X선 형광 분광기, RT-1 X선 망원경, PrOP 적산 거리계 및 관입계, RV-2N 방사선 검출기, TL 레이저 반사경 등이 포함되었다.[14]
진공 상태인 달 환경에서 작동하기 위해, 각 바퀴 허브에 있는 기계 부품과 전기 모터에는 특수한 불소 기반 윤활유가 사용되었으며, 이 부품들은 가압된 공간에 밀봉되어 있었다.[39][40] 로버는 달의 낮 동안에만 활동했으며, 주기적으로 태양광 패널을 이용해 배터리를 충전하기 위해 멈췄다. 밤에는 다음 해가 뜰 때까지 동면 상태에 들어갔고, 이때 방사성 동위원소 히터를 사용하여 내부 온도를 유지함으로써 기계적 손상을 방지했다.
한편, 루노호트 로버의 운용과 관련하여 소련 내에서는 "KGB 소속의 작은 사람이 원격 조종석에 탑승해 직접 운전했다"는 도시 전설이 퍼지기도 했으나, 이는 사실이 아니다.[15]
4. 3. 루노호트 2호
'''루노호트 2'''(차량 8ЕЛ№204)는 소련이 제작한 두 대의 루노호트 로버 중 두 번째이자 더 발전된 모델이었다.[16] 1973년 1월 8일 발사체에 실려 지구 주차 궤도에 진입했으며, 이후 달 전이 궤도로 향했다. 1973년 1월 12일, 루나 21호 우주선은 90km에서 100km 고도의 달 궤도로 감속하며 진입했다.
루나 21호는 두 번째 달 탐사 로버인 루노호트 2호를 달 표면에 배치하는 임무를 맡았다. 주요 임무 목표는 다음과 같았다.
- 달 표면 이미지 수집
- 천문 관측의 타당성 결정을 위한 주변 광 수준 조사
- 지구에서 발사된 레이저를 이용한 거리 측정 실험 수행
- 태양 X선 관측
- 달의 국지적 자기장 측정
- 달 표면 물질의 기계적 특성 연구
루나 21호는 1973년 1월 15일 23시 35분 UT에 북위 25.85도, 동경 30.45도 지점인 르 모니에 분화구에 착륙했다.
착륙 후 루노호트 2호는 주변 지역의 텔레비전 이미지를 촬영했으며, 1973년 1월 16일 01시 14분 UT에 착륙선의 경사로를 따라 달 표면으로 내려왔다. 이후 루나 21호 착륙선과 착륙 지점의 사진을 촬영했다.
로버에 탑재된 주요 장비는 다음과 같다.
- 저속 주사 텔레비전 카메라 3대: 1대는 로버 상단에 장착되어 항해에 사용되었으며, 초당 3.2, 5.7, 10.9, 21.1초의 다양한 속도로 고해상도 이미지를 전송할 수 있었다.[16]
- 파노라마 카메라 4대
- 토질 역학 시험기
- 태양 X선 실험 장치
- 천체 광도계: 가시광선 및 자외선 수준 측정
- 자기력계: 로버 앞쪽 2.5m 길이의 붐 끝에 장착
- 복사계
- 광검출기 (루빈-1): 레이저 감지 실험용
- 레이저 코너 리플렉터: 프랑스에서 제공
4. 4. 루노호트 3호

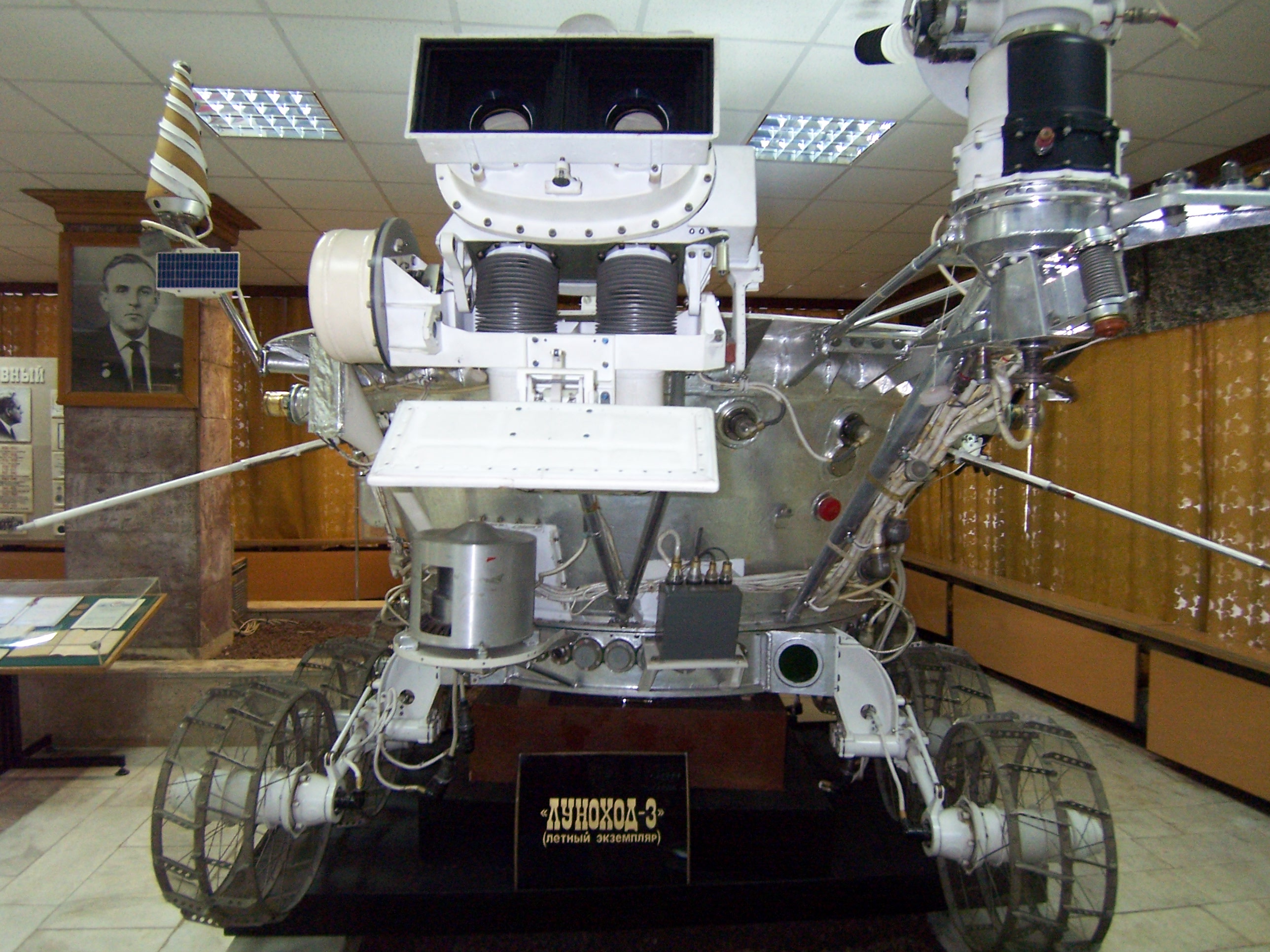
'''루노호트 3호'''(차량 8Ел№205)는 1977년 ''루나 25'' 임무의 일환으로 달 착륙을 위해 제작되었다. 그러나 발사체와 자금 부족 문제로 인해 실제로 달에 발사되지는 못했다.[17][41] 현재 NPO 라보킨 박물관에 전시되어 있다.[18]
5. 과학적 성과
루노호트 계획은 달 탐사 역사에서 중요한 과학적 성과를 남겼다. ''루노호트 1호''는 총 322일간 운영되며 10.5km를 이동했고, 2만 개 이상의 텔레비전 영상과 206개의 고해상도 파노라마 사진을 지구로 전송했다.[19] 또한 X선 형광 분광기를 이용한 토양 분석과 관입계를 통한 물리적 특성 측정을 25회 및 500개 지점에서 각각 수행했다. 1971년 통신이 두절된 지 약 40년 만인 2010년, NASA의 달 정찰 궤도선이 ''루노호트 1호''의 궤적과 최종 위치를 촬영했으며, 지상 연구자들은 레이저 거리 측정 기술을 이용해 로버에 장착된 반사경을 감지하는 데 성공했다.[21]
''루노호트 2호''는 약 4개월 동안 활동하며 42km의 거리를 이동했는데,[20] 이는 2014년 오퍼튜니티 로버가 기록을 경신하기 전까지 외계 천체 표면에서 가장 긴 이동 거리 기록이었다.[12] ''루노호트 2호''는 구릉 지대와 협곡 등을 탐사하며 86개의 파노라마 이미지와 8만 개 이상의 텔레비전 사진을 전송했으며, 달 표면의 기계적 특성 테스트, 레이저 거리 측정 실험 등 다양한 과학 임무를 성공적으로 수행했다.
루노호트 로버들의 성공적인 활동은 이후 행성 탐사의 중요한 발판이 되었다. 1997년 마스 패스파인더(Mars Pathfinder) 임무에서 소저너(Sojourner) 로버가 배치되기 전까지는 루노호트 이후 다른 원격 조종 차량이 외계 행성 표면에 보내지지 않았다. 참고로, 이후 등장한 NASA의 화성 탐사 로버인 ''스피릿(Spirit)''과 ''오퍼튜니티(Opportunity)''는 활동 5주년을 맞이한 2009년 1월까지 합계 21km를 이동하고 12만 5천 개 이상의 이미지를 전송했는데,[22] 이는 ''루노호트 2호''가 달성한 이동 거리의 절반 수준이다.
5. 1. 루노호트 1호
섬네일
초기 루노호트가 파괴된 후, 소련 엔지니어들은 즉시 또 다른 달 탐사 차량 개발에 착수했다. ''루노호트 1''(차량 8Ел№203)은 소련이 루노호트 계획의 일환으로 달에 성공적으로 착륙시킨 두 대의 무인 달 탐사 로버 중 첫 번째였다. ''루노호트 1''을 운반한 우주선은 ''루나 17호''로 명명되었으며, ''루노호트 1''은 다른 천체에 착륙한 최초의 원격 조종 로봇이었다.
''루나 17호''는 1970년 11월 10일 14:44:01 UTC에 발사되었다. 지구 주차 궤도에 도달한 후, ''루나 17호''의 마지막 단계 로켓이 점화되어 달 전이 궤도로 진입했다(1970년 11월 10일 14:54 UTC). 11월 12일과 14일에 두 차례 궤도 수정을 거쳐, 1970년 11월 15일 22:00 UTC에 달 궤도에 성공적으로 진입했다.
우주선은 1970년 11월 17일 03:47 UTC에 달의 비의 바다(Mare Imbrium) 지역에 연착륙했다. 착륙선에는 ''루노호트 1''이 달 표면으로 내려갈 수 있도록 이중 경사로가 설치되어 있었다. 같은 날 06:28 UTC에 로버는 이 경사로를 통해 달 표면에 첫발을 내디뎠다.
로버에는 다양한 과학 장비가 탑재되었다. 주요 탑재체는 카메라(텔레비전 카메라 2대, 파노라마 텔레포토미터 4대), RIFMA X선 형광 분광기, RT-1 X선 망원경, PrOP 적산 거리계/관입계, RV-2N 방사선 검출기, TL 레이저 반사경 등이었다.[14] 진공 상태인 달 환경에서 작동하기 위해, 각 바퀴 허브의 기계 부품과 전기 모터에는 특수한 불소 기반 윤활유가 사용되었고, 이 부품들은 가압된 공간에 보관되었다.[39][40] 로버는 달의 낮 동안 활동했으며, 태양광 패널을 이용해 배터리를 충전하기 위해 주기적으로 정지했다. 밤에는 활동을 멈추고 동면 상태에 들어갔으며, 이때 방사성 동위원소 히터(RHU)를 사용하여 극저온으로 인한 기계 고장을 방지했다.
소련 내에서는 루노호트 로버를 "KGB 난쟁이"가 운전했다는 도시 전설이 퍼지기도 했으나,[15] 이는 사실이 아니다.
총 322일간의 운영 기간 동안, ''루노호트 1호''는 10.5km를 이동하며 달 표면을 탐사했고, 2만 개 이상의 텔레비전 영상과 206개의 고해상도 파노라마 사진을 지구로 전송하는 성과를 거두었다.[19] 또한 RIFMA X선 형광 분광기를 이용해 25회에 걸쳐 달 토양 성분을 분석했으며, 500곳의 다른 지점에서 관입계를 사용하여 토양의 물리적 특성을 측정했다.
1971년 ''루노호트 1호''와의 통신이 두절된 지 거의 40년이 지난 2010년, NASA의 달 정찰 궤도선(LRO)이 탐사선의 이동 경로와 최종 위치를 촬영하는 데 성공했다. 또한 지상 연구자들은 망원경과 펄스 레이저 거리 측정기를 사용하여 로봇에 장착된 레이저 반사경을 감지하기도 했다.[21]
5. 2. 루노호트 2호
''루노호트 2''(차량 8ЕЛ№204)는 소련의 두 번째 달 탐사 로버로, 이전 모델보다 더 발전된 성능을 가졌다. 1973년 1월 8일 발사체는 루노호트 2호를 탑재한 루나 21 우주선을 지구 주차 궤도에 올렸고, 이후 달 전이 궤도로 진입시켰다. 1973년 1월 12일, ''루나 21''은 고도 90km에서 100km 사이의 달 궤도로 성공적으로 진입했다.
''루나 21'' 우주선의 주 임무는 ''루노호트 2''를 달 표면에 안전하게 착륙시키는 것이었다. 루노호트 2호의 주요 목표는 다음과 같았다.
- 달 표면의 상세한 이미지 수집
- 달에서의 천문 관측 가능성을 판단하기 위한 주변 광량 측정
- 지구에서 발사된 레이저를 이용한 거리 측정 실험 수행
- 태양 X선 관측
- 착륙 지점 주변의 자기장 측정
- 달 표면 물질의 기계적 특성 연구
착륙은 1973년 1월 15일 23시 35분(UTC)에 르 모니에 분화구(북위 25.85도, 동경 30.45도)에서 이루어졌다.
착륙 직후 ''루노호트 2''는 주변 지형의 텔레비전 이미지를 촬영했고, 1973년 1월 16일 01시 14분(UTC)에 착륙선의 경사로를 따라 달 표면으로 내려왔다. 이후 ''루나 21'' 착륙선과 착륙 지점의 사진을 촬영하여 지구로 전송했다.
로버에는 다양한 과학 장비가 탑재되었다.
''루노호트 2호''는 약 4개월 동안 활동하며 구릉 지대와 협곡을 포함하여 총 42km의 거리를 탐사했다.[20] 이는 2014년 오퍼튜니티 로버가 기록을 경신하기 전까지 외계 천체 표면에서 가장 긴 이동 거리 기록이었다.[12] 활동 기간 동안 86개의 파노라마 이미지와 8만 개 이상의 텔레비전 사진을 지구로 전송했으며, 달 표면의 기계적 특성 테스트, 레이저 거리 측정 실험 등 다양한 과학 임무를 성공적으로 수행했다.
1997년 NASA의 마스 패스파인더(Mars Pathfinder)가 소저너(Sojourner) 로버를 배치하기 전까지 루노호트 2호는 원격 조종으로 외계 행성 표면을 탐사한 마지막 로버였다. 참고로, 비슷한 크기의 NASA 화성 탐사 로버인 ''스피릿(Spirit)''과 ''오퍼튜니티(Opportunity)''는 활동 시작 5년째인 2009년 1월까지 합계 21km를 이동하고 125,000개 이상의 이미지를 전송했다.[22][43]
6. 체르노빌 사고와 루노호트
1986년 발생한 체르노빌 원자력 발전소 사고는 예상치 못한 방식으로 루노호트 계획의 기술을 다시 수면 위로 끌어올렸다.[23][44] 사고 현장의 극심한 방사능 오염으로 인해 인간의 접근이 제한되자, 과거 달 탐사를 위해 개발되었던 원격 조종 로버 기술이 대안으로 떠오른 것이다.[24][45] 이에 은퇴했던 루노호트 설계자들이 다시 모여 방사선 환경에 견딜 수 있도록 개량된 로버 '''STR-1'''을 단기간에 개발하여 사고 현장에 투입했다.[23][46][12][38] 비록 극한의 방사선 환경 속에서 STR-1 역시 한계를 드러냈지만[23][25][47], 루노호트 기술은 인류 역사상 최악의 원자력 사고 중 하나를 수습하는 과정에서 중요한 역할을 수행했다.
6. 1. 사고 복구에 활용된 루노호트 기술
장 아파나시에프의 프랑스 다큐멘터리 텔레비전 영화 ''달 위의 탱크''에 따르면, 1986년 4월 26일 발생한 체르노빌 원자력 발전소 사고로 인해 15년 만에 루노호트 설계가 다시 주목받게 되었다.[23][44] 당시 소련 민방위군이 보유했던 동독제 원격 제어 불도저는 무게가 수십 톤에 달해, 부분적으로 붕괴된 원자로 건물 지붕 위에서 작업하기에는 너무 무거웠다. 또한 강렬한 이온화 방사선 때문에 인간 작업자는 90초 간격으로 교대해야 했으므로 잔해 제거 작업에 효율적으로 투입되기 어려웠다.[24][45]이에 은퇴했던 루노호트 설계자들이 다시 소집되었고, 2주 만에 새로운 로버를 제작했다. 이 로버는 핵붕괴 과정에서 발생하는 열을 이용해 내부 장비의 온도를 조절하고, 전자 시스템을 강화하여 방사선에 어느 정도 견딜 수 있도록 설계되었다.[23][46] 이러한 기술적 개선 덕분에 설계자들은 핵 재해 복구 작업에 투입할 파생 차량을 신속하게 개발할 수 있었다. 1986년 7월 15일, '''STR-1'''이라고 명명된 로버 두 대[12][38]가 체르노빌 사고 현장에 투입되어 잔해 제거 작업에 유용함을 증명했고, 설계자들은 공로를 인정받아 상을 받았다. 하지만 현장의 방사선 수치가 극도로 높아 결국 STR-1 로버들도 고장났고, 최종적으로는 '리크비다토르'라고 불리는 인간 작업자들이 투입되어 남은 작업을 수행해야 했다.[23][25][47]
2019년에 방영된 미국-영국 합작 텔레비전 드라마 『체르노빌』에서도 이 일화가 다루어진다. 드라마에서는 STR-1 로버가 원자로 건물 지붕 중 비교적 방사선 오염도가 낮은 구역의 잔해를 제거하는 모습이 묘사된다. 하지만 오염도가 매우 높은 구역에서는 STR-1을 사용할 수 없었고, 서독에서 도입한 '조커'라는 원격 조종 불도저를 투입하려 했으나 작업 시작 직후 고장나는 것으로 그려진다. 이는 소련 정부가 사고의 심각성을 축소하여 서독 측에 실제보다 낮은 방사선량 정보를 제공했기 때문인 것으로 묘사되며, 결국 '바이오로봇'으로 불린 리크비다토르들이 직접 투입되는 과정을 보여준다.
7. 현재 위치 및 소유권
루노호트 1호는 2010년까지 수 킬로미터 오차 범위 내에서 위치가 불확실했고, 달 레이저 거리 측정 실험에서도 신호 감지에 실패했었다.[26][27] 그러나 2010년 달 정찰 궤도선(LRO) 이미지 분석과[28][29] 후속 레이저 거리 측정 성공으로[21] 최종 위치가 확인되었다.
루노호트 2호는 달 레이저 거리 측정 실험을 통해 현재까지도 위치가 수십 센티미터 단위의 정밀도로 추적되고 있다. 루노호트 2호와 착륙선 루나 21호의 소유권은 1993년 12월 뉴욕 소더비 경매에서 68500USD에 판매되었으며,[30] 구매자는 컴퓨터 게임 개발자이자 우주비행사인 리처드 개리엇이다.[31] 개리엇은 현재까지도 루노호트 2호의 소유권을 가지고 있다고 알려져 있다.[32][33][34]
7. 1. 루노호트 1호

초기 루노호트가 발사 실패로 파괴된 후, 소련 엔지니어들은 즉시 다른 달 탐사 차량 개발에 착수했다. ''루노호트 1호''(차량 8Ел№203)는 소련이 루노호트 계획의 일환으로 달에 성공적으로 착륙시킨 두 대의 무인 달 탐사 로버 중 첫 번째이다. ''루노호트 1호''를 탑재한 우주선은 ''루나 17호''로 명명되었다. ''루노호트 1호''는 인류 역사상 다른 천체에 착륙한 최초의 원격 조종 로봇이라는 중요한 의미를 가진다.
''루나 17호''는 1970년 11월 10일 14시 44분 01초(UTC)에 발사되었다. 지구 주차 궤도에 도달한 후, ''루나 17호''의 마지막 단 로켓이 점화되어 우주선을 달로 향하는 궤도에 올렸다(1970년 11월 10일 14시 54분 UTC). 두 차례의 궤도 수정(11월 12일과 14일)을 거쳐 1970년 11월 15일 22시 00분 UTC에 달 궤도에 성공적으로 진입했다.
우주선은 1970년 11월 17일 03시 47분 UTC에 비의 바다(Mare Imbrium) 지역에 연착륙했다. 착륙선에는 ''루노호트 1호''가 달 표면으로 내려갈 수 있도록 이중 경사로가 설치되어 있었다. 같은 날 06시 28분 UTC에 로버는 경사로를 통해 달 표면으로 이동했다.
''루노호트 1호''에는 다음과 같은 과학 장비들이 탑재되었다.[14]
- 카메라: 텔레비전 카메라 2대, 파노라마 텔레포토미터 4대
- RIFMA X선 형광 분광기
- RT-1 X선 망원경
- PrOP 적산 거리계/관입계 (토양 물리적 특성 측정)
- RV-2N 방사선 검출기
- TL 레이저 반사경 (달 거리 측정용)
한편, 루노호트 로버가 실제로는 KGB 요원 중 키가 작은 사람이 직접 조종했다는 도시전설이 소련 내에 퍼지기도 했으나[15], 11개월간의 임무 수행에 필요한 보급품을 어떻게 실었는지에 대한 설명은 없다.
2010년까지 ''루노호트 1호''의 최종 위치는 수 킬로미터 오차 범위 내에서만 추정될 뿐 정확히 알려지지 않았다.[48] 1970년대 이후 달 레이저 거리 측정 실험에서는 ''루노호트 1호''의 반사경으로부터 신호를 받는 데 실패했기 때문이다.[49] 그러나 2010년 3월 17일, 알베르트 압드라키모프(Albert Abdrakhimov)가 달 정찰 궤도선(LRO)이 촬영한 고해상도 이미지(M114185541RC)에서 착륙선과 로버를 모두 발견했다.[50][51] 이어 2010년 4월 22일, 톰 머피(UCSD)와 러셋 맥밀란(Russet McMillan) 연구팀이 아파치 포인트 천문대의 망원경을 이용한 펄스 레이저 거리 측정 장치로 마침내 로버의 반사경 신호를 감지하는 데 성공했다.[36]
7. 2. 루노호트 2호
''루노호트 2''(차량 8ЕЛ№204)는 루노호트 계획에서 발사된 두 대의 로버 중 두 번째이자 더 발전된 모델이었다. 1973년 1월 8일 발사되어 지구 주차 궤도에 진입한 뒤, 달 전이 궤도를 통해 달로 향했다. 1973년 1월 12일, 모선인 ''루나 21''은 90km × 100km의 달 궤도로 진입하는 데 성공했다.
''루나 21'' 우주선은 ''루노호트 2''를 달 표면에 배치하기 위해 설계되었다. 이번 임무의 주요 목표는 다음과 같았다.
착륙은 1973년 1월 15일 23:35 UT에 르 모니에 분화구(북위 25.85도, 동경 30.45도)에서 이루어졌다.
착륙 후 ''루노호트 2''는 주변 지역의 텔레비전 이미지를 촬영했으며, 1973년 1월 16일 01:14 UT에 경사로를 이용해 달 표면으로 내려왔다. 이후 ''루나 21'' 착륙선과 착륙 지점의 사진을 촬영했다.
로버에는 3대의 저속 주사 텔레비전 카메라가 장착되었다. 이 중 하나는 로버 상단에 설치되어 항해에 사용되었으며, 초당 3.2, 5.7, 10.9 또는 21.1초(프레임 속도가 아님)의 다양한 속도로 고해상도 이미지를 전송할 수 있었다.[16] 또한 4대의 파노라마 카메라도 탑재되었다.
과학 장비로는 토질 역학 시험기, 태양 X선 실험 장비, 가시광선 및 자외선 수준을 측정하는 천체 광도계, 로버 앞쪽 2.5m 길이의 붐 끝에 장착된 자기력계, 복사계, 레이저 감지 실험을 위한 광검출기 (루빈-1), 그리고 프랑스에서 제공한 레이저 코너 리플렉터가 포함되었다.
참고로, 루노호트 1호의 경우 2010년까지 최종 위치가 수 km 오차 범위 내에서 불확실했고[26][48] 1970년대 이후 달 레이저 거리 측정 실험에서 반사 신호를 감지하지 못했다.[27][49] 그러나 2010년 3월 17일 달 정찰 궤도선(LRO) 이미지 M114185541RC에서 착륙선과 로버가 발견되었고,[28][50][29][51] 같은 해 4월 22일 아파치 포인트 천문대에서 레이저 거리 측정기를 이용해 로버의 반사경을 성공적으로 감지했다.[21][36]
반면, 루노호트 2호는 달 레이저 거리 측정 실험을 통해 지속적으로 위치가 감지되고 있으며, 그 위치는 수십 cm 단위의 높은 정밀도로 알려져 있다.
루노호트 2호와 루나 21호 착륙선의 소유권은 1993년 12월 뉴욕의 소더비 경매에서 라보킨 설계국에 의해 68500USD에 판매되었다.[30][52] (당시 경매 카탈로그에는 68A번 품목이 ''루나 17호/루노호트 1호''로 잘못 기재되어 있었다.)[31][53] 구매자는 컴퓨터 게임 기업가이자 우주비행사의 아들인 리처드 개리엇이었다. 그는 울티마 게임 시리즈의 캐릭터 로드 브리티시라는 이름으로도 알려져 있다. 개리엇은 2001년 인터뷰에서 "나는 러시아로부터 ''루나 21호''(실제로는 루노호트 2호와 루나 21호 착륙선)를 구입했다. 나는 현재 외계 천체에 있는 물건의 세계 유일한 개인 소유자이다. 어떤 정부도 지구 밖의 지형에 대한 권리를 주장할 수 없다는 국제 조약이 있지만, 나는 정부가 아니다. 요약하면, 나는 로드 브리티시의 이름으로 달을 주장한다!"라고 말했다.[32][54] 2007년에도 개리엇은 여전히 ''루노호트 2호''의 소유자임을 밝혔다.[33][34][55][56]
참조
[1]
웹사이트
Soyuz 7K-LOK
http://www.astronaut[...]
2022-11-07
[2]
웹사이트
"10.7 Луноходы Симф"
https://web.archive.[...]
2015-07-27
[3]
웹사이트
NIP-10 Simferopol Near Earth Satellite Center, The Lunokhod Moon Drome
https://www.flickr.c[...]
2011-08-30
[4]
웹사이트
Космическая энциклопедия
http://www.astronaut[...]
2008-09-18
[5]
웹사이트
Panoramio is no longer available
https://web.archive.[...]
2017-10-27
[6]
간행물
SIMFEROPOL SPACEFLIGHT CENTER
http://rumlin.narod.[...]
NATIONAL PHOTOGRAPHIC INTERPRETATION CENTER
1969-06
[7]
웹사이트
Infinity Beckoned by Jay Gallentine
https://web.archive.[...]
[8]
웹사이트
Lunochod's chief designer is dead
https://web.archive.[...]
Cosmic Mirror
2003-03-06
[9]
뉴스
Rovers learning from Lunokhod
https://eandt.theiet[...]
E&T News
2011-03-14
[10]
웹사이트
Den ryska månbilen
https://web.archive.[...]
2008-02-11
[11]
웹사이트
Moon applications
http://www.synlube.c[...]
Synlube Lube-4-Life
[12]
웹사이트
Tank on the Moon
https://web.archive.[...]
2007-12-06
[13]
웹사이트
Energy Resources for Space Missions
http://www.spacesafe[...]
2014-01-18
[14]
웹사이트
In Depth {{!}} Luna 17
https://web.archive.[...]
2022-06-29
[15]
웹사이트
KGB Dwarf
http://www.astronaut[...]
2022-06-26
[16]
웹사이트
Экипажи Лунохода
http://www.astronaut[...]
[17]
서적
Soviet and Russian Lunar Exploration
https://books.google[...]
Springer
2014-04-20
[18]
논문
The Other Moon Landings
https://wayback.arch[...]
2004-02
[19]
웹사이트
Lunokhod 1 Panoramas
http://www.planetolo[...]
2013-04-30
[20]
웹사이트
NASA Moon Probe Helps Revise Off-Planet Driving Record {{!}} Lunokhod 2
http://www.space.com[...]
2013-07-12
[21]
논문
Forgotten Soviet Moon Rover Beams Light Back to Earth
https://web.archive.[...]
2011-05-28
[22]
간행물
Public Events Mark Mars Rovers' Five-Year Anniversary
https://web.archive.[...]
Jet Propulsion Laboratory
2009-04-26
[23]
웹사이트
Lunokhod: From the Moon to Chernobyl, the Little Robot That Could!
https://web.archive.[...]
2016-06-21
[24]
웹사이트
Lunokhod and the Art of Space
http://cabinet-of-wo[...]
2016-06-21
[25]
논문
Soviet Official Admits That Robots Couldn't Handle Chernobyl Cleanup
http://www.the-scien[...]
2016-06-21
[26]
conference
Lunar laser ranging and the location of Lunokhod 1
http://www.lpi.usra.[...]
[27]
웹사이트
Lunar Lost & Found: The Search for Old Spacecraft
http://www.space.com[...]
SPACE.com
2006-03-27
[28]
웹사이트
And now for Luna 17 and Lunokhod 1
https://web.archive.[...]
Planetary Report
2010-04-12
[29]
웹사이트
LROC Observation M114185541R
http://wms.lroc.asu.[...]
Arizona State University
[30]
논문
The Bloc on the Block
http://discovermagaz[...]
1994-04
[31]
문서
Sotheby's Catalogue - Russian Space History
1993-12-11
[32]
웹사이트
Lord British, we hardly knew ye
http://demiurg.net/g[...]
via Demiurg.net
2001-04-13
[33]
웹사이트
The Astronaut's Son's Secret Sputnik
http://www.collectsp[...]
CollectSPACE
2007-10-02
[34]
인터뷰
Sputnik: 50 Years, One Month, Two Weeks Later
http://radio.seti.or[...]
SETI Institute
2007-12-10
[35]
논문
Lunochod's chief designer is dead
http://www.astro.uni[...]
Cosmic Mirror
2003-03-06
[36]
논문
Forgotten Soviet Moon Rover Beams Light Back to Earth
http://spectrum.ieee[...]
[37]
웹사이트
Космическая энциклопедия
http://www.astronaut[...]
2008-09-18
[38]
간행물
Tank on the Moon
http://www.cbc.ca/na[...]
[39]
간행물
Den ryska månbilen
http://www.svt.se/sv[...]
[40]
웹사이트
Moon applications
http://www.synlube.c[...]
Synlube Lube-4-Life
2012-08-28
[41]
논문
The Other Moon Landings
http://www.airspacem[...]
2004-02
[42]
뉴스
Distances Driven on Other Worlds (Infographic)
http://www.space.com[...]
Space.com
2013-01-24
[43]
보도자료
Public Events Mark Mars Rovers' Five-Year Anniversary
http://marsrover.nas[...]
Jet Propulsion Laboratory
2009-01-12
[44]
URL
http://www.rightpund[...]
[45]
URL
http://cabinet-of-wo[...]
[46]
URL
http://www.liquida.c[...]
[47]
URL
http://ja-jp.faceboo[...]
[48]
학회자료
Lunar laser ranging and the location of Lunokhod 1
http://www.lpi.usra.[...]
[49]
웹사이트
Lunar Lost & Found: The Search for Old Spacecraft
http://www.space.com[...]
SPACE.com
2006-03-27
[50]
웹사이트
And now for Luna 17 and Lunokhod 1
http://www.planetary[...]
Planetary Report
2010-03-17
[51]
웹사이트
LROC Observation M114185541R
http://wms.lroc.asu.[...]
Arizona State University
[52]
논문
The Bloc on the Block
http://discovermagaz[...]
1994-04
[53]
서적
Sotheby's Catalogue - Russian Space History
Sotheby's
1993-12-11
[54]
웹사이트
Lord British, we hardly knew ye
http://demiurg.net/g[...]
via Demiurg.net
2001-04-13
[55]
웹사이트
The Astronaut's Son's Secret Sputnik
http://www.collectsp[...]
CollectSPACE
2007-10-02
[56]
인터뷰
Sputnik: 50 Years, One Month, Two Weeks Later
http://radio.seti.or[...]
SETI Institute
2007-12-10
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com